机械臂连杆设计的优化方法和实践


REF:一种 SCARA机器人小臂优化设计
对于连杆的设计,通常采用尺寸优化 → 拓扑优化 → 详细设计验证的分层递进策略。先在宏观上调整截面和壁厚,再在微观上优化材料分布,最后进行精细化设计与综合验证。轻量化与高强度本质是矛盾的,优化本质是寻找最佳平衡点。在拓扑优化中,静动态双目标的权重设置至关重要,建议进行敏感性分析。
对抑制抖动而言,提高第一阶固有频率往往比单纯减轻质量更重要,确保优化后的一阶频率远离机器人的主要工作频率(如关节伺服带宽、运动节拍频率),在后期,可考虑在臂内部添加阻尼材料(如约束层阻尼片)或采用复合材料设计,从材料层面进一步抑制振动。
对于SCARA机械臂,可以利用遗传算法得到大、小臂的优化长度,同时利用拓扑优化方法对影响本体振动的小臂进行结构优化,得到高强度、高刚度、重复定位准确的小臂重构模型,达到降低执行端抖动的目的。
1. 常用方法:
- 有限元分析方法,通过结构静力分析、模态分析,应用结构优化技术,优化小臂的截面尺寸及相应壁厚
- 模态分析法,利用ANSYS Workbench,以小臂结构厚度为优化变量,以小臂质量为目标函数,对机械臂进行尺寸优化,并完成臂部连杆的拓扑优化
- 变密度法的优化算法,同时考虑结构静、动力学性能的双目标,利用ANSYS Workbench有限元软件实现钢质壁面作业机器人小臂结构的拓扑优化,实现轻量化设计
2. 基本优化步骤
2.1 尺寸优化:目标是确定关键结构尺寸的最优初始值
- 设计变量:小臂截面的关键尺寸、各段壁厚,先用遗传算法(GA)或Workbench内置的响应面优化与直接优化工具
- 约束条件:
- 静刚度:在最大负载及自重下,小臂末端最大变形量 ≤ 允许值(如0.1 mm)
- 动刚度:第一阶固有频率 ≥ 目标值(如50-100 Hz,远离伺服系统主要激励频率)
- 强度:最大等效应力 ≤ 材料屈服强度的1/3~1/2(安全系数)
- 目标函数:最小化质量
- ANSYS Workbench操作,得到一组(或几组)在性能约束下质量最轻的截面尺寸和壁厚参数
2.2 拓扑优化(实现材料最优分布):寻找材料的最佳分布路径。
- 设计区域:将小臂主体(避开与电机的安装面)定义为可优化区域
- 非设计区域:明确保留轴承座、电机安装法兰、末端执行器连接面等区域。
- 约束条件:
- 体积约束:要求优化后材料体积不超过原体积的40%-60%(此比例需根据刚度要求试探)。
- 性能约束:可同时约束最大静变形和基频。
- 目标函数(双目标加权处理):
- 最大化静刚度(最小化柔度):在典型负载工况下,使结构整体变形能最小
- 最大化基频:提升动态性能。
- 制造约束:添加脱模方向约束或对称约束,以确保优化结果可制造。
- 输出:得到一个材料密度云图,指示何处材料可去除(密度接近0),何处材料需保留或加强(密度接近1)。
2.3. 重构设计
将拓扑优化的结果转化为可制造的工程模型,并进行最终验证。
- 几何重构:依据密度云图,在软件中重新设计小臂。
- 高刚度区域:转化为加强筋、内部肋板或加厚壁。
- 低应力区域:进行镂空、开减重孔或减薄。
- 工艺考虑:
- 铸造/焊接方案:优化结果通常适合铸造(复杂筋板结构)或焊接(板材拼焊)。
- 机加工/增材制造:对于高性能需求,可考虑采用铝镁合金CNC加工或钛合金/高性能铝合金3D打印,以实现更复杂的点阵或拓扑结构。
- 细节优化:
- 过渡圆角:所有尖角处添加适当圆角,大幅降低应力集中。
- 筋板布局:遵循“传力路径”原则,使筋板走向与主应力方向一致。
2.4 综合验证:
- 静力分析:验证在极限工况下的强度与刚度。
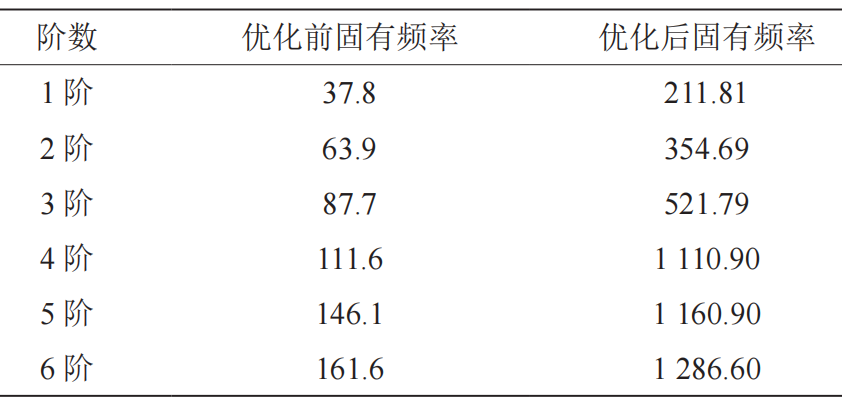
- 模态分析:计算前6阶振型与频率,确保基频达标且振型合理(避免末端出现过大摆动模态)。
- 谐响应分析或瞬态动力学分析:模拟实际运动(如加减速)或周期性激励下的动态响应,定量评估末端抖动是否在允许范围内。
- 轻量化效果评估:对比优化前后质量、刚度/质量比、频率/质量比等关键指标。
3. Scara优化实践
经过模态分析可以得到 SCARA 机械臂本体的动态特性参数如下,低阶频率小臂变形明显,且中、前端变形较为突出,1~3 阶小臂前端变形较大。4阶小臂中间变形最大。为了避免因共振引起的变形,增加小臂的低阶频率是一种有效的方法。
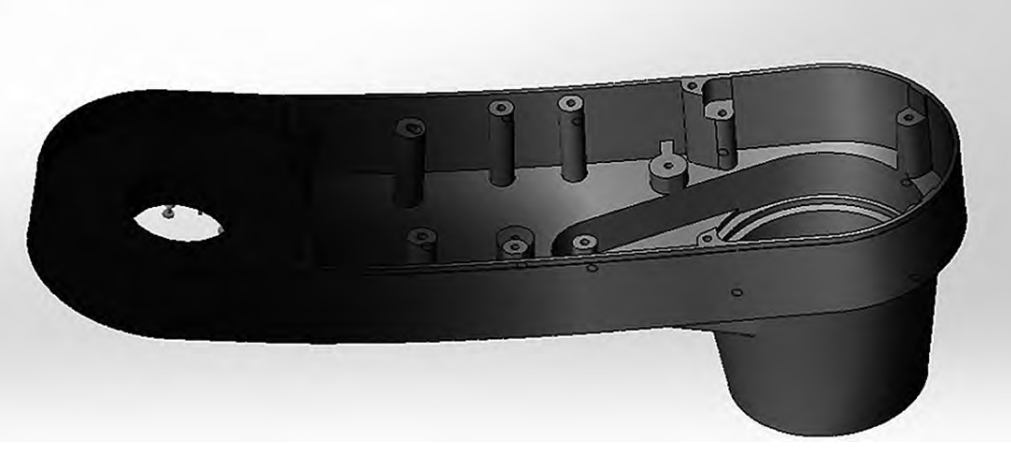
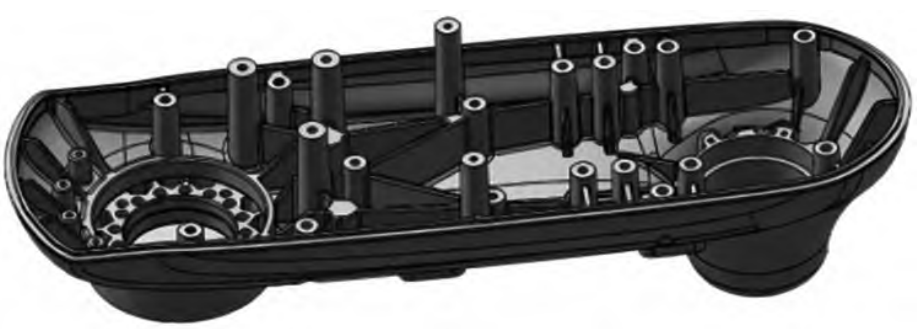
分三步拓扑优化:第一,将设计区域分割成若干个小区域 ;第二,利用优化法则优化小设计区域的结构 ;第三,删除非必要区域,保留下来的区域即为最优的拓扑结构,优化前后的小臂模型如下:
优化后总质量减少14.75%,等效应力为减少12.85%,结构的强度和刚度明显增加,,各阶模态固有频率均有所提高,其中 1 阶固有频率提高了4.6 倍,提升了小臂的抗振性能,实现了对SCARA 机器人重复定位精度和抑振能力。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-21,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号