scara机械臂分析示例,跟随阿基米德螺线


REF:四自由度 SCARA 机器人系统机构设计及运动学分析
1
三维建模
SCARA 机器人由基座 、 大臂 、 小臂和腕部组成,基座与大臂间连接称为肩关节,大臂与小臂间连接称为肘关节,小臂与腕部间连接称为腕关节。
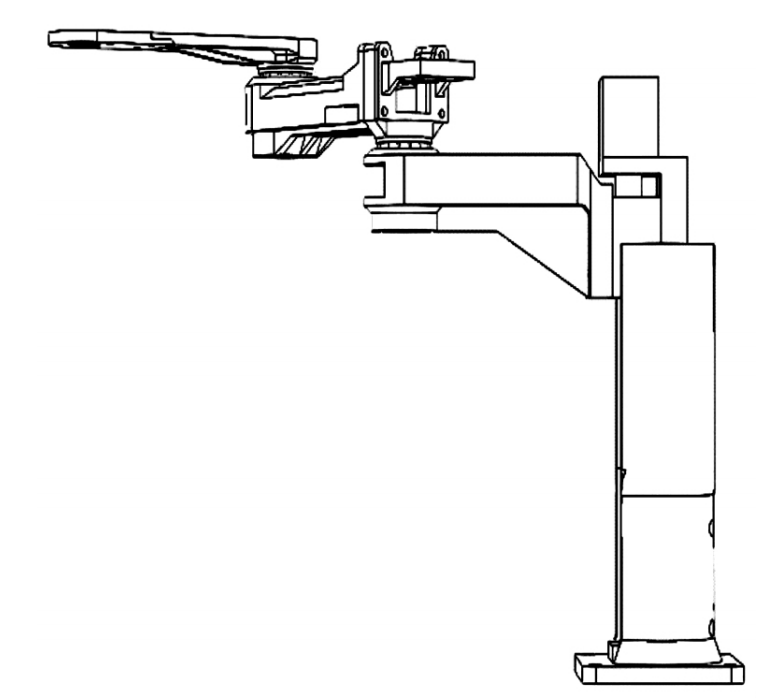
- 肩关节(步进电机 1 ) 直接与滚珠丝杆相连,丝杆滑台与大臂固接,实现大臂在竖直方向的移动
- 肘关节(步进电机 2 ) 与同步齿形带 1 相连,同步齿形带 1 输出端直接与小臂相连,驱动小臂旋转
- 腕关节(步进电机3) 与同步齿形带 2 安装在小臂内部,同步齿形带 2 将动力传递到腕部,实现腕部旋转运动
2
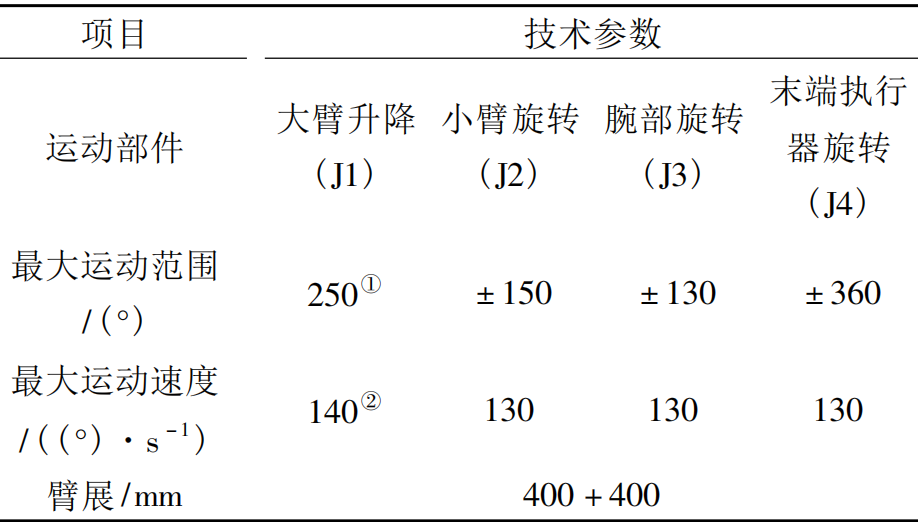
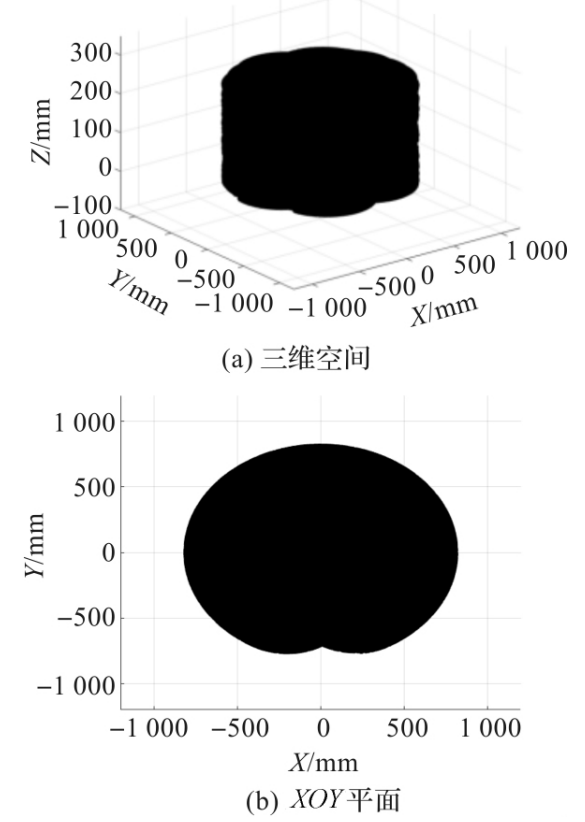
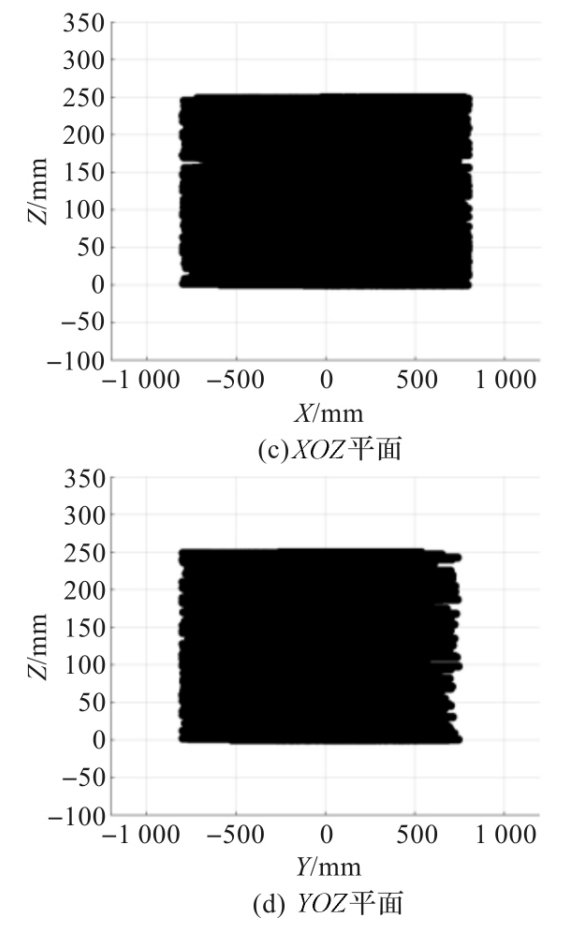
工作空间分析
通过蒙特卡洛法计算得到 SCARA 机器人工作空间
3
DH参数
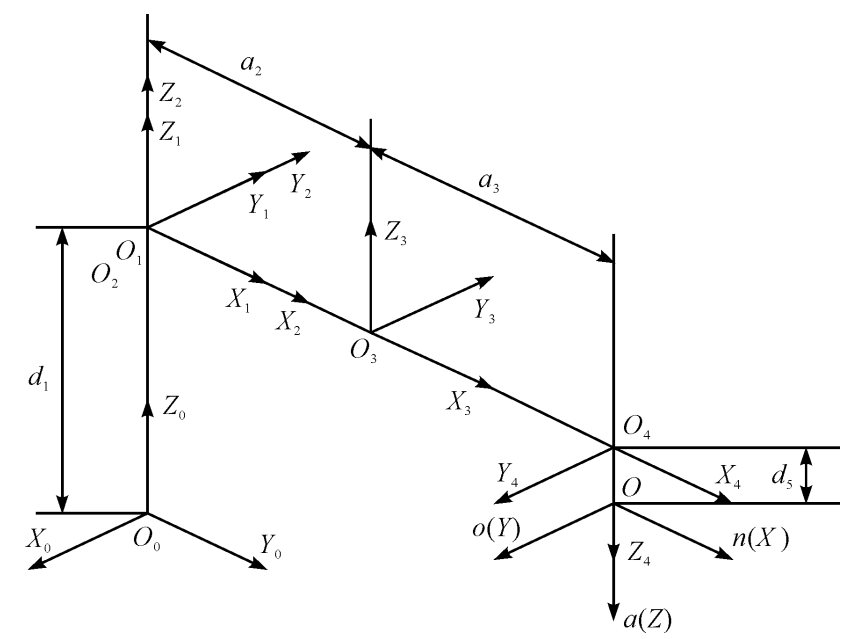
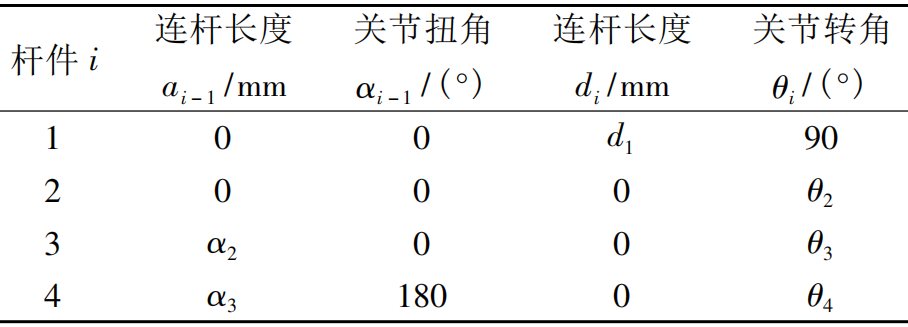
SCARA 机器人连杆坐标系及机器人 D-H 参数与关节变量如下:
4
运动学(基于各关节角求末端位姿)
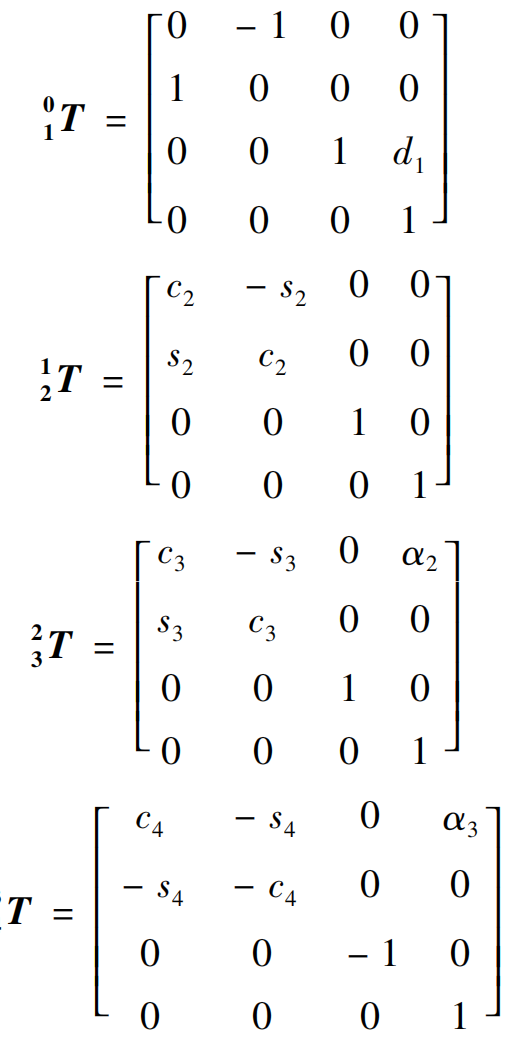
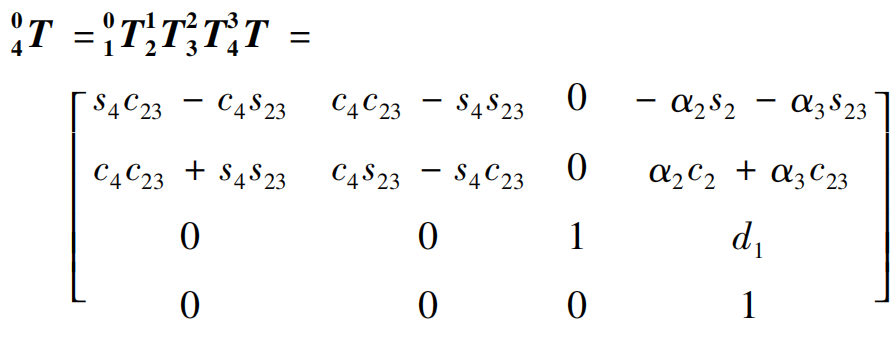
由机器人连杆坐标系与 D-H 参数表,得到各坐标系齐次变换矩阵分别为
5
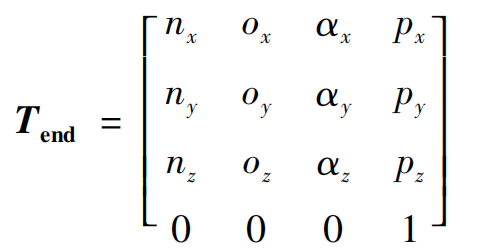
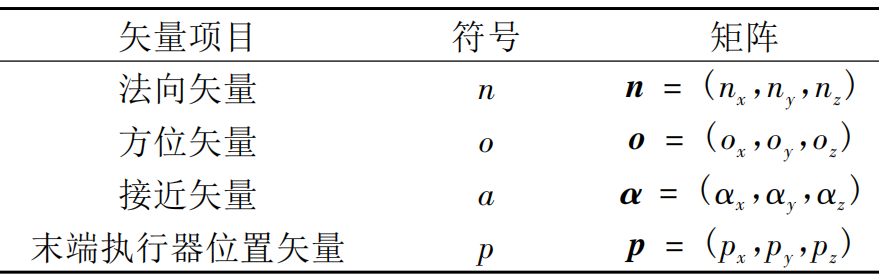
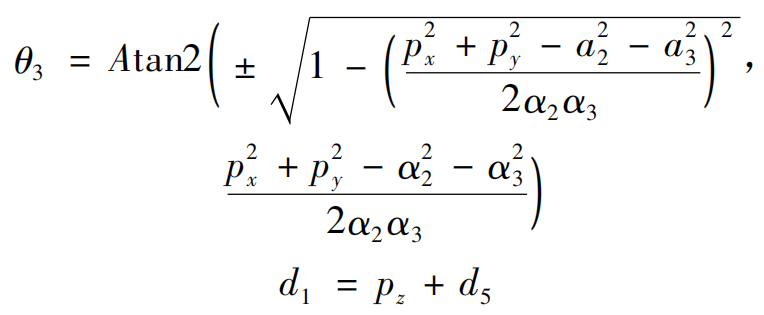
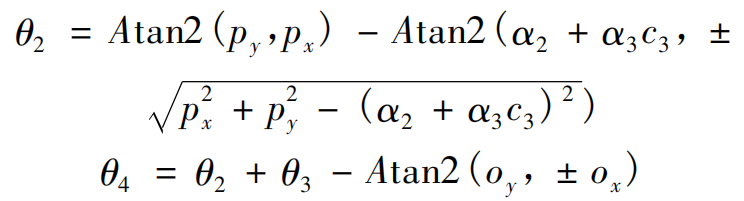
运动学逆解( 基于末端位姿求各关节角)
以代数法求解 SCARA 机器人逆运动学 ,令末端执行器位姿矩阵: T end :
6
仿真实验
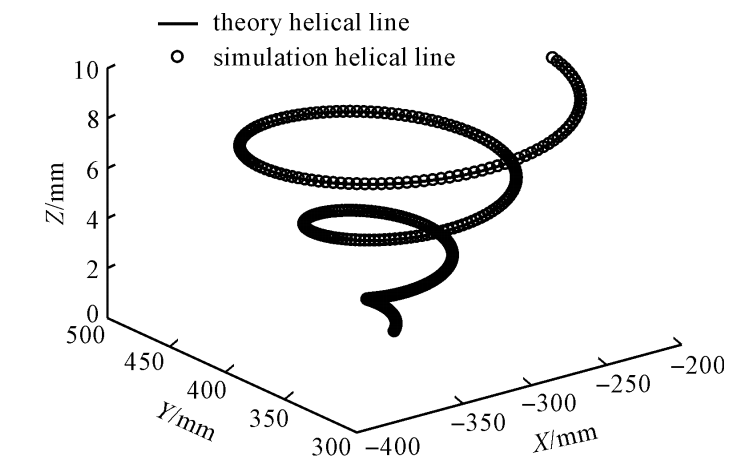
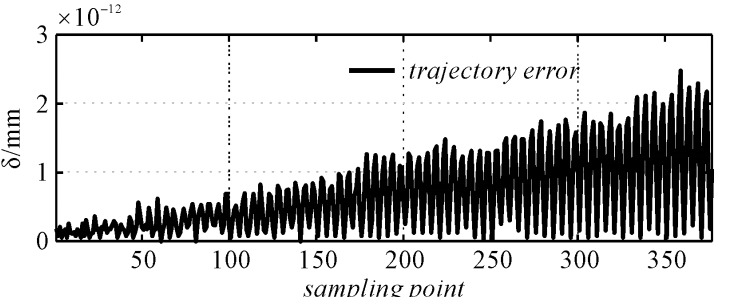
Matlab 空间曲线上各样本点作为机械臂末端位姿,通过运动学逆解出相应关节角,最后将关节变量值代入末端执行器的正向运动学方程,得到机械臂末端位姿的仿真,通过对比仿真轨迹与实际轨迹重合情况,验证逆运动学反解。
选取空间阿基米德螺线为待仿真轨迹,以直线 x = - 300 ,y = 400 为空间阿基米德螺线中心线,5 mm /rad 为阿基米德螺旋线系数,以 π 为螺距生成空间螺旋线,以 0. 05 rad 为步长取样,将空间阿基米德螺线离散为 377 个样本点,机器人运动学分析所得逆运动学反解,实现了精确控制机器人末端执行器的位置。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-21,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号