一种搭载SCARA机械臂的复合机器人


REF:基于 AGV 底盘与 SCARA 机械臂的数控车削自动装卸系统设计
01
总述
AGV 底盘的设计集中在定位精度和移动效率上,要求 底盘顺畅地移动到目标位置, SCARA 机械手的设计集中在夹取精度、位置控制及运动解算上,复合机器人需要根据目标位置计算出最优的移动路径和姿态 , 这要求高效的算法来优化运动轨迹 , 减少装卸时间 , 同时确保操作的高精度。

02
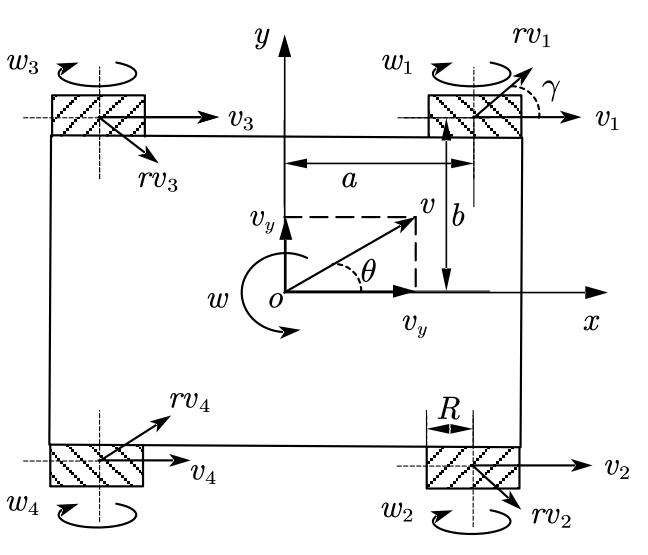
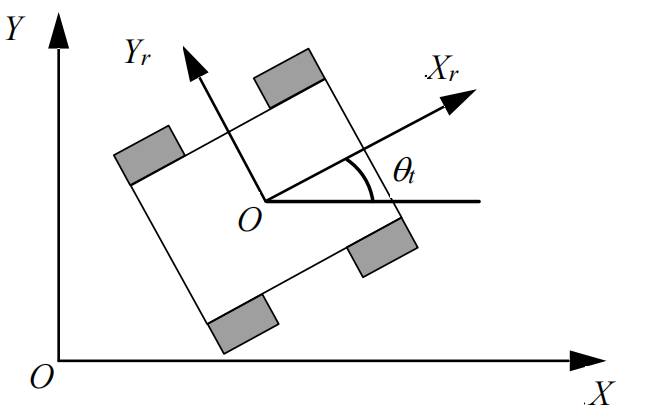
AGV 移动平台
小车平台采用麦克拉姆轮和闭环控制步进电机,在平面内的移动距离信息和陀螺仪检测 Z 轴的旋转角度, 实现全场定位, 采用位置式 PID 控制策略来控制小车姿态与位置
03
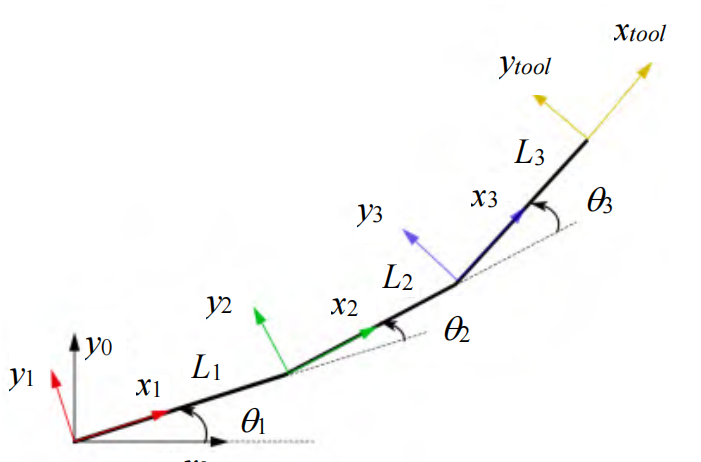
SCARA机械手
用伺服电机作为机械臂的驱动器,方便对机械臂状态准确读取和调试 , 通过读取电机的角度信息来获取机械臂的当前位置, 将电机角度转换为机械臂在空间中的位置和姿态
当前复合机器人的主要优点包括:
- 装卸运输一体化,系统将装卸和运输集成在一起 , 减小了体积 , 提高了灵活度 , 满足了小型企业多样化的生产需求
- 高精度移动平台, 小车位置信息及 轨迹定制容易 , 可编程性更高 , 使得机器人可以在复杂环境中准确地完成任务
- 自动化处理系统能够实现零件的自动化装卸, 无需人工干预 , 大大提高了生产效率 , 降低了人工操作成本
- 可靠性和稳定性,系统按照预先设定的程序和规则进行自动化操作 , 提高了生产过程的可靠性和稳定性。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-08,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号