常见单目视觉和机械臂绝对定位的方法


REF:基于单目视觉的 SCARA 机械臂末端绝对定位精度提升方法
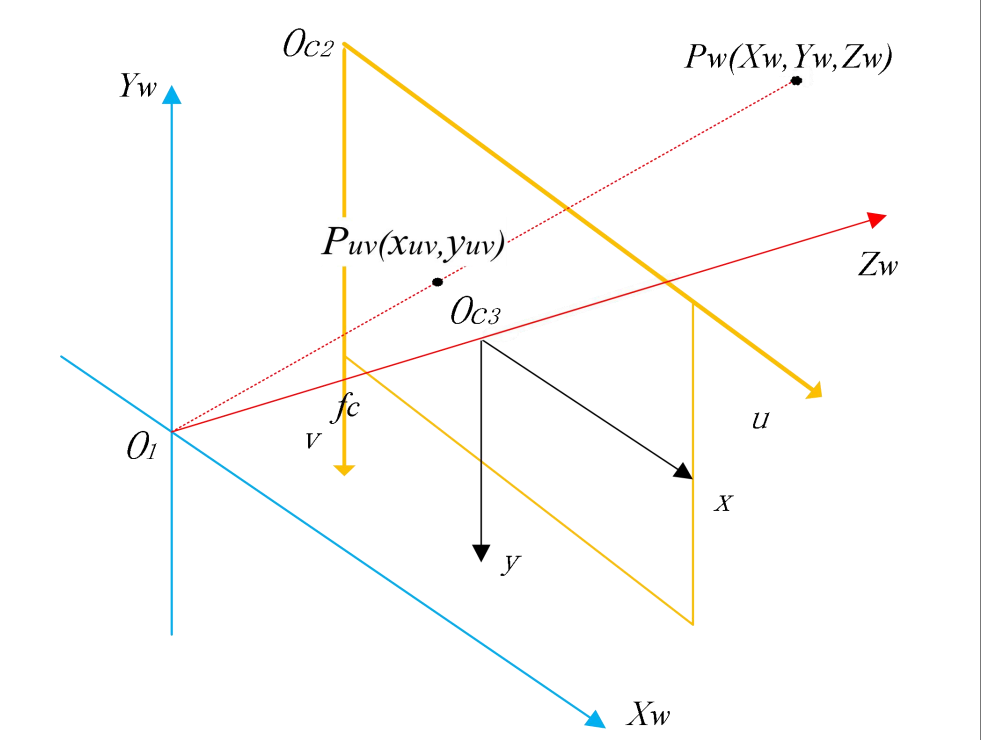
通过单目相机来获取机械臂末端位置的信息,是因为单目相机成本低,且SCARA机械臂的末端运动只在XOY 方向上的平面运动,Z 轴是一个固定高度,末端位置的深度信息变化十分细微,完全符合单目视觉的平面测量的优势。
1. 单目视觉定位方法
单目视觉技术在复杂环境下,特征点匹配受环境中其他特征干扰较严重容易存在匹配错误,从而导致定位精度下降,只适合处理小场景,因为当相机分辨率固定时随着采集场景越大,相机单像素精度就越差从而导致测量精度越差,使用简单的相机标定很难达到高精度测量的要求。
- 通过四边形边长的几何关系进行目标物的定位
- 在相似的几何代数基础上,建立特征点与特征直线的目标函数,使用优化算法实现定位
- 基于逆投影光线方法的两阶段选代算法,针对特征点的相对位置和姿态估计问题通过迭代逼近的方式求解
- 以红外阵列灯测量图像作为单目视觉的输入图像,通过视觉技术构建位移和旋转的数学关系,对位移和转动实现检测
- 基于模板匹配的并行加速自适应单目标跟踪算法,基于Faster-RCNN 模型更新模板的单目标捕捉方法,涉及的特征较多且每个特征都需要计算匹配,算法的运算量较大。
- 基于RANSAC 框架的方案,通过数据驱动机制自适应确定迭代过程中最优的计算模型
- 基于视觉SLAM 技术构建场景重建系统,通过分析关键帧三维点云与多摄像机像素间的2D-2D 空间对应关系实现位姿解算,进而获得像素点在联合参考坐标系中对应的三维点之间的对应关系。
- 基于单目视觉测量的P3P-RPE算法,采用红色圆形标识物作为基准特征点,进行精确测量,该方法受特征点颜色变化影响较大,抗干扰较差
2. 机械臂绝对定位精度方法
机械臂绝对定位精度的提升方法主要分离线误差补偿和在线误差补偿,离线误差补偿是在机械臂工作前,根据某些方法提前优化机械臂的控制输入来提升其绝对定位精度,如数学逼近法、运动模型参数标定法、神经网络方法、空间插值方法等;在线误差补偿是通过安装实时监测的反馈系统,持续采集机械臂末端位置信息,根据反馈系统获得的实时位置信息动态调整控制策略使机械臂达到期望位置。相对于离线补偿技术,在线补偿的绝对定位精度普遍会更高、稳定性更强
2.1 离线误差补偿
- 采用度量轴线方法与径向排列约束标定方法,得出安装在机械臂末端执行器上的相机中心与世界坐标系的坐标映射关系,从而得到关节轴线方程
- 通过BP 神经网络建立误差映射关系来补偿误差,并使用粒子群优化方法优化BP 神经网络参数的初值,使其不会在训练中出现局部极值的现象
- 选取机械臂关节空间的采样点,建立机械臂关节空间与末端位置误差的非线性映射模型,再通过数控系统实现机器人工具中心点的实时补偿
- 采用空间插值估算出末端执行器在目标位置的定位误差,对其补偿提高机械臂绝对定位精度
- 在末端执行器上安装激光测距传感器,结合地板划分的网格,构建相对测量框架。通过捕捉不同位姿下的脉冲量差值,使用相对位置测量标定方法得到机械臂的实际运动学参数,避免了传统标定方法中复杂的坐标系转换需求
- 先测量轨迹上各个特定点的位置误差,再通过轨道上的所有点建立一个广义误差模型,最后建立反向模型用来计算修正后标准坐标,从而实现末端执行器的最佳定位精度
2.2 在线误差补偿
- 通过建立工业机器人的温度误差模型,分析工业机器人的构造特点以及连杆变化情况,得出受温度波动影响较大的参数
- 利用自适应模糊神经推理算法,搭配相关控制算法对机器人自身的形变进行补偿
- 基于离线标定结果的在线误差补偿方法,由基于指数乘积公式的标定算法和一套在线补偿程序组成。
- 一种视觉-模糊复合控制方法,使用激光条纹束和面阵相机进行结构照明
- 通过系统揭示机械臂加工过程中各种误差来源,并进一步地研究装配中的间隙误差,根据实际情况开发在线控制器,通过高精度光栅实时监测末端执行器位姿偏移,当检测到超过设定的位置偏差时,触发基于运动学逆解的速度前馈补偿。
离线补偿方法需要进行复杂的计算,且属于开环控制模式,这往往会导致计算耗时较长,同时无法对机械臂的运动状态实时监控。普遍使用的补偿设备统进行补偿,常用测量设备(如激光跟踪仪)或复杂的传感器成本较高。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-07,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号