SCARA机器人的系统设计


REF:一种基于SCARA机器人机械结构设计、SCARA机器人结构设计及轨迹规划算法
1. 结构设计
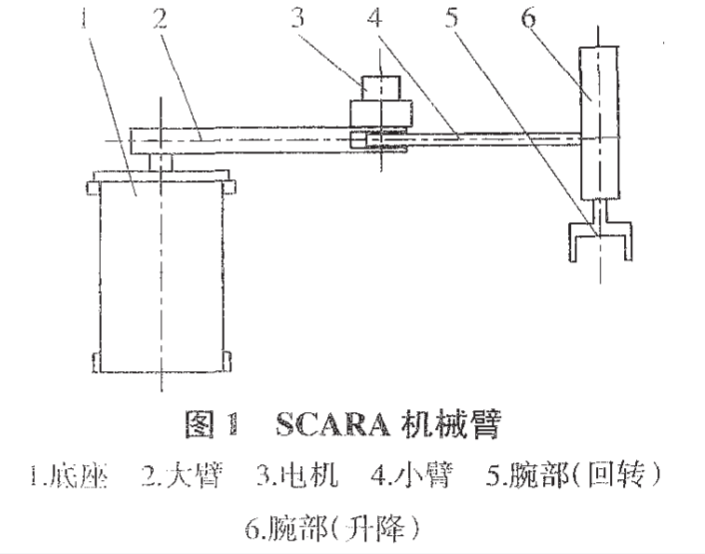
SCARA机械臂的设计根据应用的要求把机构的可靠性和结构简单作为设计的第一位考虑,采用4关节的机械结构,即4自由度机器人,具体包括底座,大臂、 小臂、腕部。
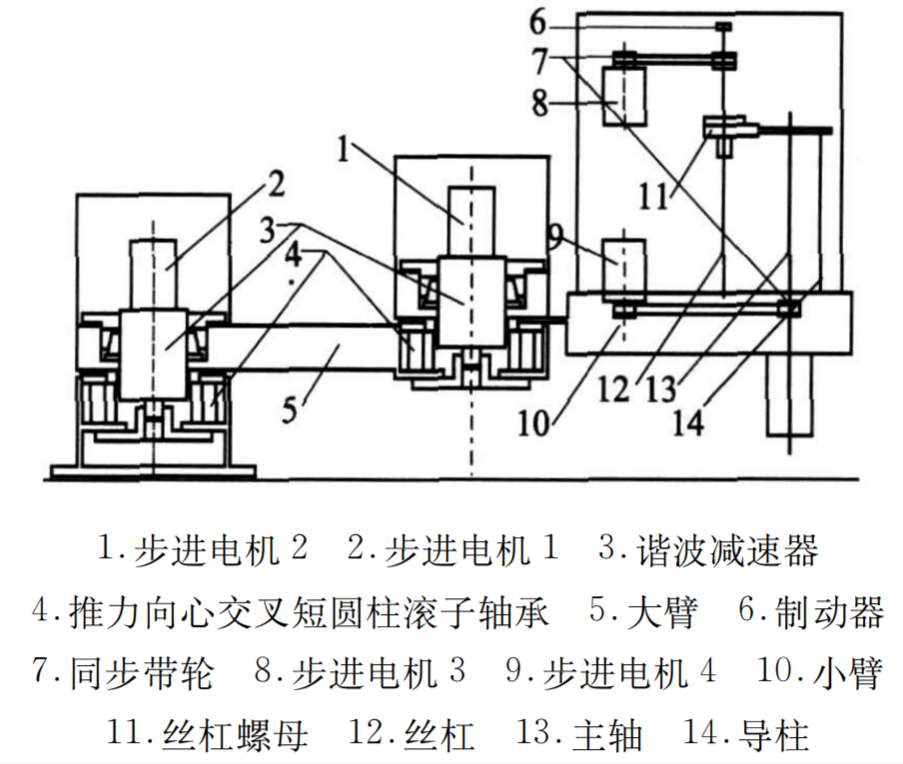
第一、第二和第四关节直接采用转动电机做传动设备,第三关节采用同步带传动的方式升降,机械臂机构的外形如图
2. 电机选型
对于SCARA机械臂,其横向负载关节(J1和J2旋转轴)绝大多数情况下使用的是高精度、高动态响应的伺服电机系统,并且通常会搭配高减速比的精密减速机(如谐波减速机)。在实际选型中,需要进行一系列计算和考量,主要遵循以下标准:
a. 动态负载与扭矩计算 这是选型的第一步,计算出电机轴需要提供的最大连续扭矩和峰值扭矩。
公式概要:所需扭矩 =(负载扭矩 + 摩擦扭矩) × 安全系数
- 负载扭矩:计算手臂、负载、减速机等所有旋转部件产生的转动惯量,再根据要求的最大角加速度,
扭矩 = 转动惯量 × 角加速度 - 安全系数:通常取1.5到2,确保电机有足够余量。
b. 运动速度与精度要求
- 速度:根据节拍要求,确定J1、J2轴的最高转速。电机额定转速搭配减速比后,需满足此要求。
- 精度:SCARA的重复定位精度通常要求在±0.01mm甚至更高,由“伺服电机编码器分辨率 × 减速比”决定。高分辨率编码器和高精度减速机是实现高精度的保障。
c. 不同轴的特殊考量
- Z轴(垂直升降轴):此轴需要克服重力,且需紧急停止时保持位置,建议选择带抱闸(制动器)的伺服电机,以防断电时负载下滑。
- R轴(末端旋转轴):负载通常较小,对扭矩要求低,但对转速和精度可能有要求。可选择小功率的伺服电机或甚至高性能的步进电机(在轻载、中低速场景下),以降低成本。
d. 步进减速电机和一体化关节电机对比
特性维度 | 步进减速电机 | 关节电机模组 (一体化关节) |
|---|---|---|
本质 | 步进电机 + 减速器的组合 | 高度集成的系统,通常含无框力矩电机、谐波/行星减速器、编码器、驱动器、刹车等 |
控制与精度 | 开环控制,易失步,精度依赖步距角 | 闭环控制,编码器实时反馈,精度高,动态响应快 |
扭矩特性 | 低速扭矩大,高速时扭矩下降快 | 全速域内可保持恒定、充沛的扭矩输出,过载能力强 |
集成度与安装 | 需自行组装、连线、调试电机、驱动器等部件 | “即插即用”,出厂已校准,大幅简化机械和电气集成 |
核心优势 | 成本低,控制系统简单 | 高精度、高动态性能、高可靠性、节省开发时间 |
典型场景 | 对成本敏感、中低速、负载稳定的简易机械臂或教育项目 | 高性能协作机械臂、人形机器人等要求高精度、高响应、频繁启停或变负载的场景 |
3. 控制系统
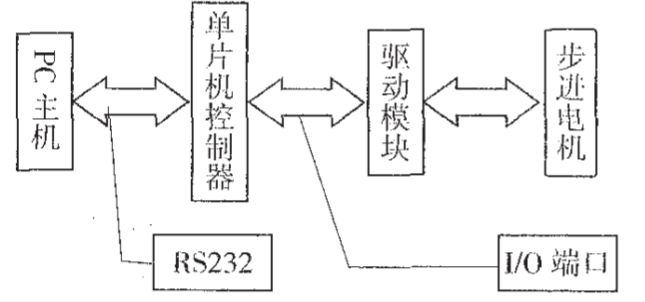
可以采用开环和闭环的方式,闭环控制可以使机械臂的运动和输入的指令期望的运动参数尽可能的吻合,但是控制部分和机械部分的结构相对复杂,开环控制方式就比较简单,而且在满足电机不失步的情况下,电机的定位精度很高。 开环控制系统结构图如下:
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-01-30,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号