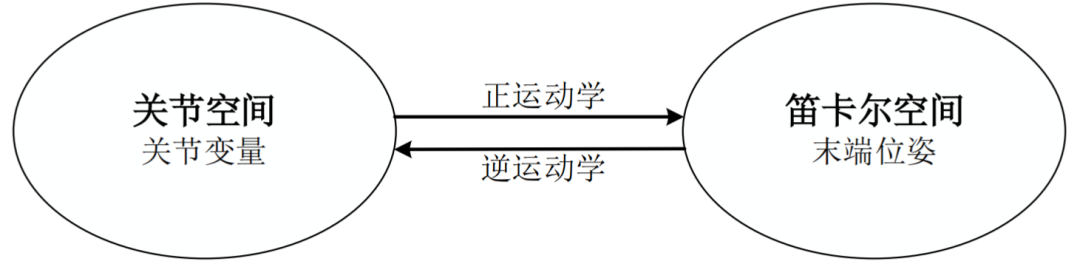
基于DH的Scara机械臂的运动学模型


REF:SCARA机器人的轨迹规划及其半实物仿真平台验证
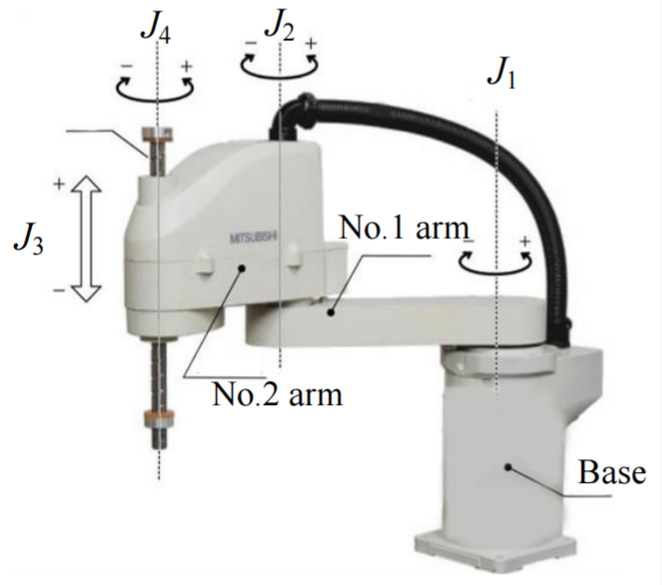
1. 模型分析
SCARA 机器人由一系列连杆通过移动和旋转关节连接而成,为了便于对其进行运动学分析,需要建立数学模型,将关节和连杆简化,在基座建立基坐标系,在各关节建立对应的局部坐标系,然后通过齐次变换将基坐标与各局部坐标以及局部坐标之间进行位姿转换,可以将末端位姿通过各个连杆坐标系进行表达。
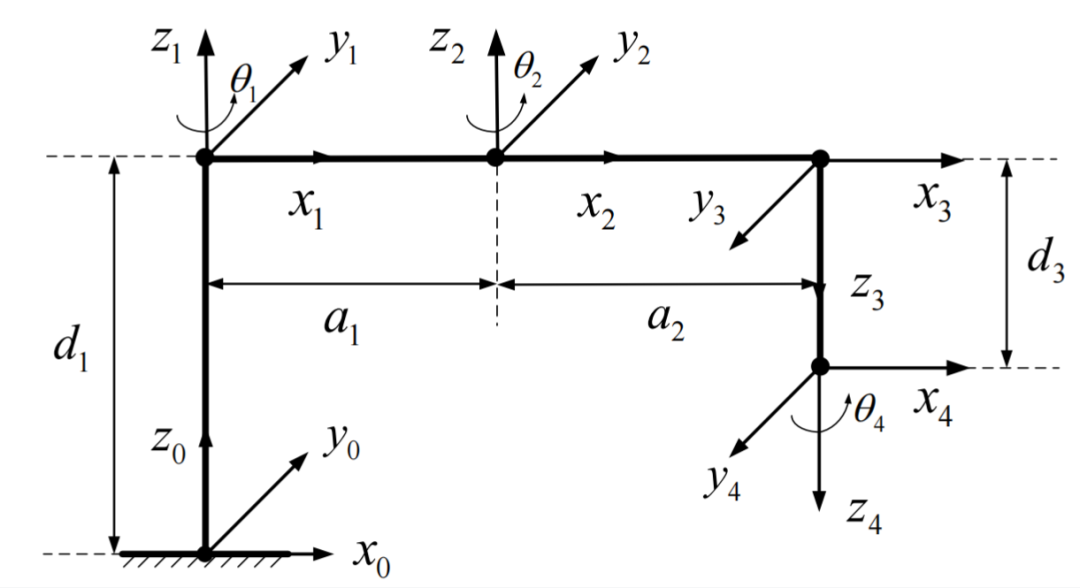
对于 D-H 建模法,每个连杆i的4个特征参数含义如下:
(a)连杆长度 ai-1:相邻关节 z 轴轴线间的垂直距离,即从 zi-1 沿 xi-1 轴到 zi 的距离。
(b)关节偏置量 di:从 xi-1 沿 zi-1 轴到 xi 的距离。
(c)连杆扭角 αi-1:从 zi-1 到 zi 的转角,沿 xi-1轴的指向为正。
(d)关节转角 θi:从 xi-1 到 xi 的转角,沿 zi 轴顺时针转向为正。
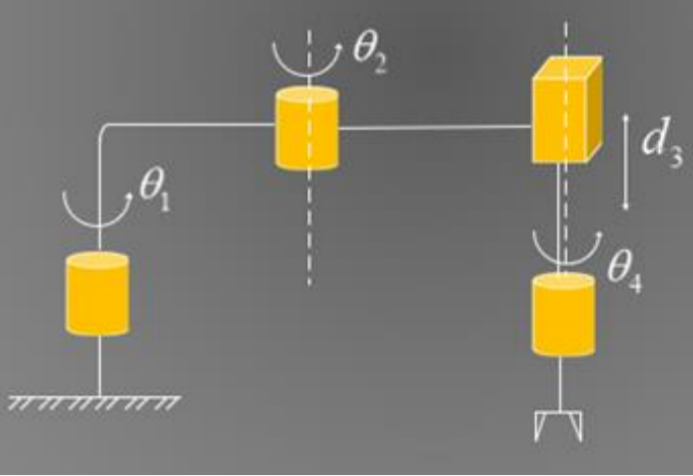
连杆坐标系及参数表示,旋转关节 J1、J2、J4 的z 轴方向可根据右手定则得到,而移动关节J3 的z 轴所指方向为直线运动方向。
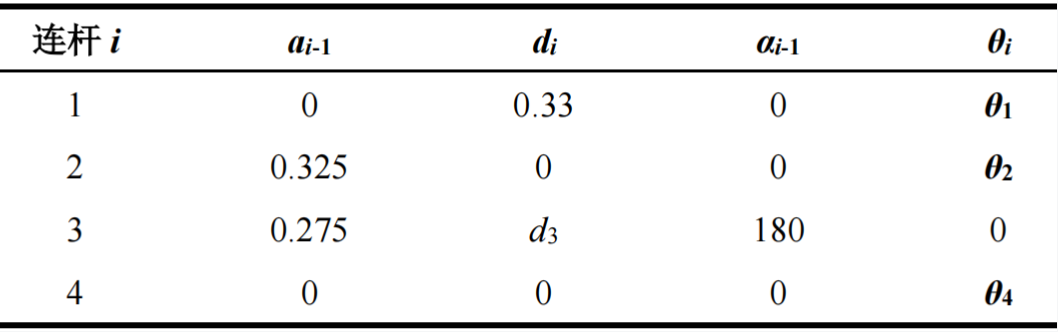
机器人的连杆参数,旋转关节 1、2、4 的关节变量为θi,移动关节3 的关节变量为d3,简化模型的变量及对应DH参数表如下:
2. 运动学转换矩阵
SCARA 机器人各相邻关节间齐次变换矩阵如下:
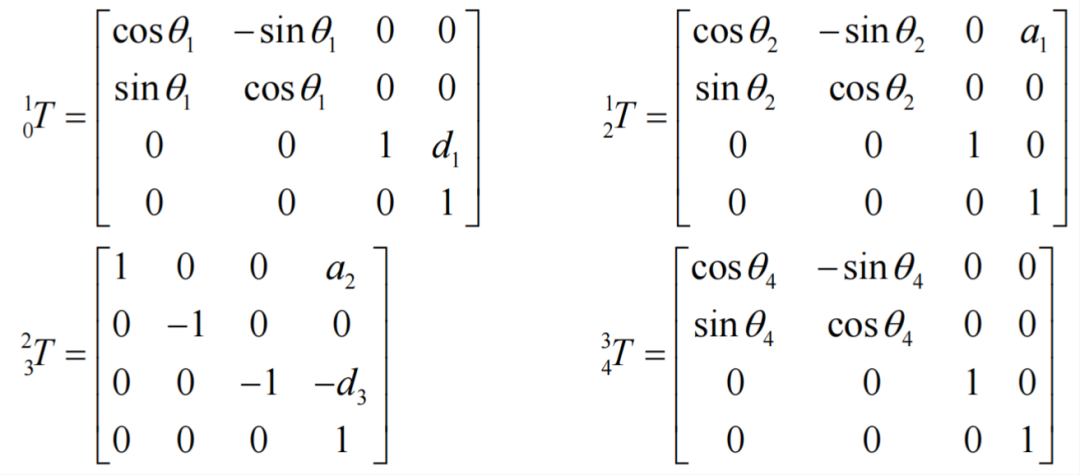
4个连杆坐标系与基坐标系之间的转换矩阵,求得机器人的正运动学方程如下:
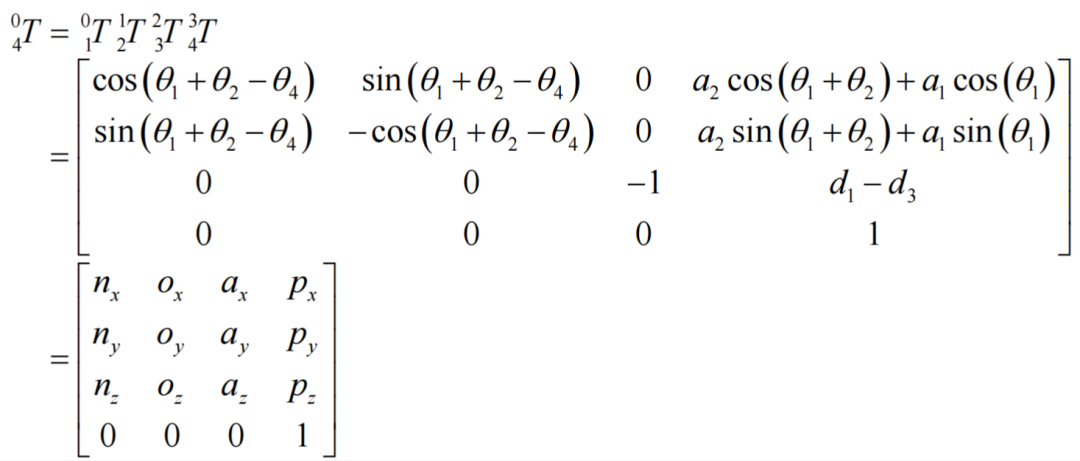
其中,n、o、a 分别代表轴 x4、y4、z4 相对于基坐标轴 x0、y0、z0 的方向余弦,而p 代表轴x4、y4、z4 相对于基坐标轴x0、y0、z0 的位置向量。根据上面转换矩阵,可由四个关节的关节变量和连杆参数求得机器人末端位姿。
3. 运动学逆解IK
机器人逆运动学求解算法分为封闭解和数值解,其中数值解法因为需要迭代计算,不能满足实时性要求,所以并不常用。
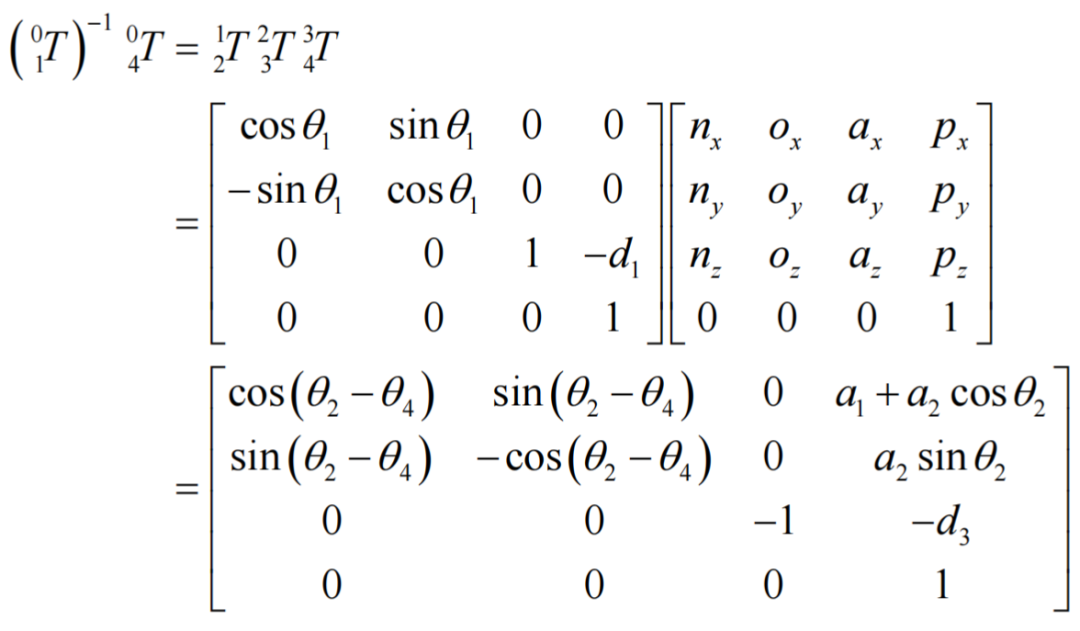
已知基座到末端的位姿变换矩阵,根据式正运动学方程,可通过左乘逆矩阵分离变量,然后按照代数法对应相等即可求出变量。
对于J1的旋转角度变量,通过基座到J1的逆矩阵,左乘正运动学方程如下:
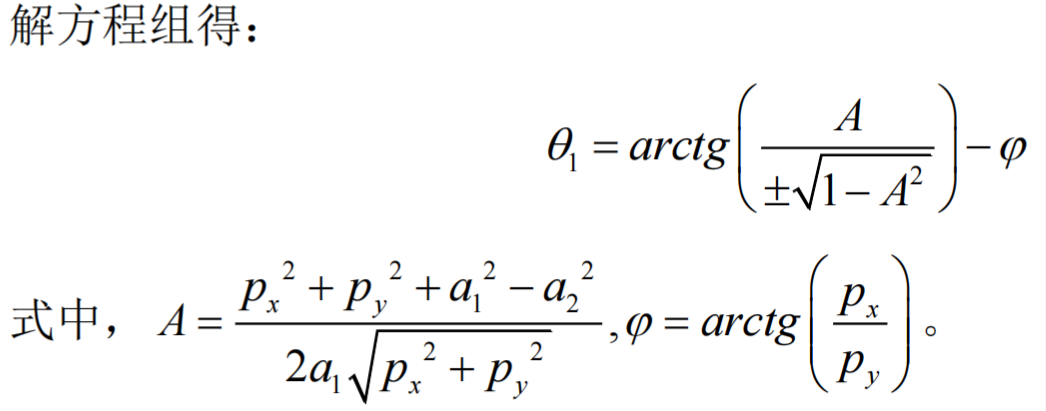
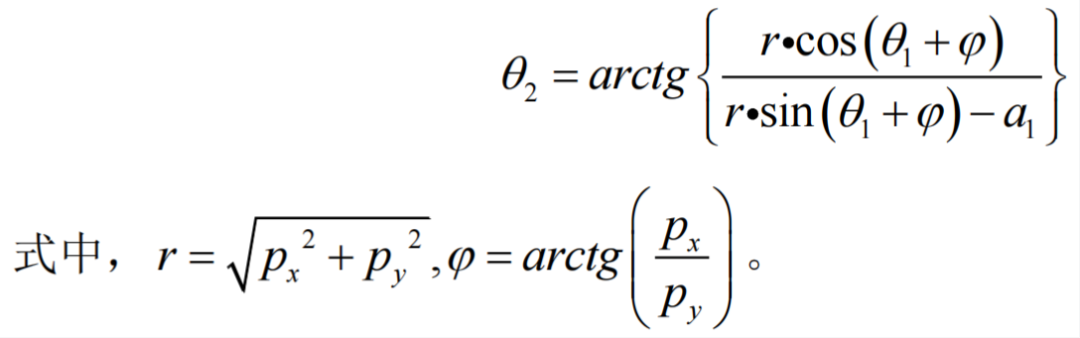
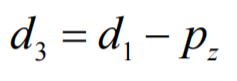
依次求解四个关节对应的变量如下:

4. 奇异点位置
上面求对变换矩阵求逆需要矩阵本身可逆,但是机器人运动到奇异位置时,雅克比矩阵就变为奇异矩阵,而奇异矩阵没有逆矩阵,也就无法通过解析法求得运动学逆解,此时所有的轨迹规划都将失去意义。
SCARA 机器人末端执行器的雅可比矩阵如下:
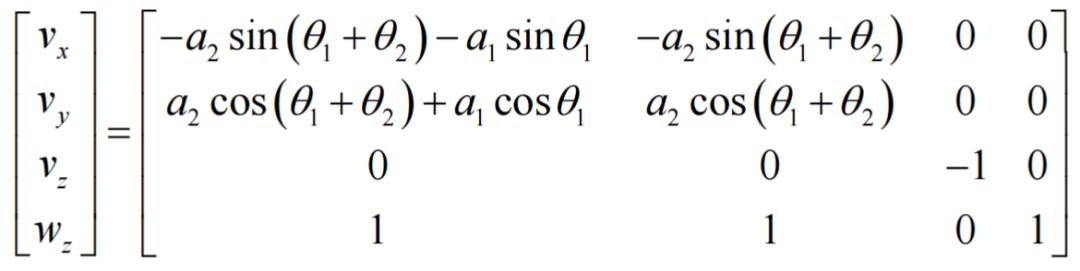
另行列式为0,得到

a1、a2 为 SCARA 机器人大臂、小臂的长度,不可能为0,故当 θ2=0 时,SCARA机器人位于奇异位置。
笛卡尔空间进行轨迹规划时需要注意避免奇异位置,而关节空间轨迹规划是直接对关节变量进行规划,不需要求逆,也就不存在奇异点。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-02,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号