基于视觉和激光的机械臂高精度标定方法


REF:基于单目视觉的 SCARA 机械臂末端绝对定位精度提升方法
首先,建立机械臂本体坐标系与像素坐标系的转换关系,实现机械臂末端像素信息与机械臂末端实际位置的转换;然后,以机械臂原点为基准,使用激光跟踪仪获取机械臂的实际末端位置信息;最后,与视觉测量数据进行对比获得视觉的测量误差。
1. 使用实验材料
机械臂末端同时安放光源标记物和激光跟踪球,激光球中心与两个光源标记物的几何中心一致,使用激光跟踪仪测量安装在机械臂末端的激光球,使相机和激光跟踪仪能够同时测量末端位置信息。
- Leica AT960 激光跟踪仪
- MV-CS060-10UM-PRO 黑白面阵相机
- 激光跟踪靶球
- 两个固定功率的圆形LED 灯

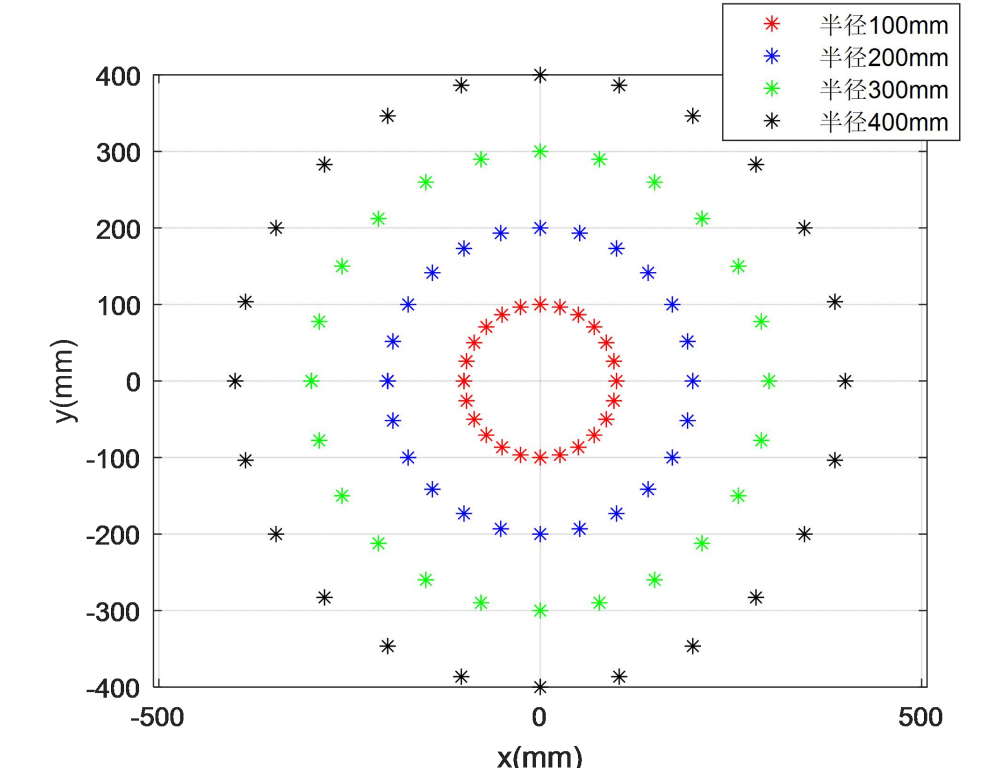
2. 数据采集(圆轨运动)
机械臂以其第一个自由度的法兰盘中心为圆心,分别进行半径为100mm、200mm、300mm、400mm 的圆轨迹运动。对这些运动圆轨迹上等角度的25个点进行采集数据,位置点都间隔30 度,将测量数据与理论位置进行比较,计算两者的差值,得到视觉测量数据,视觉测量数据包括机械臂实际运动误差和视觉测量误差。
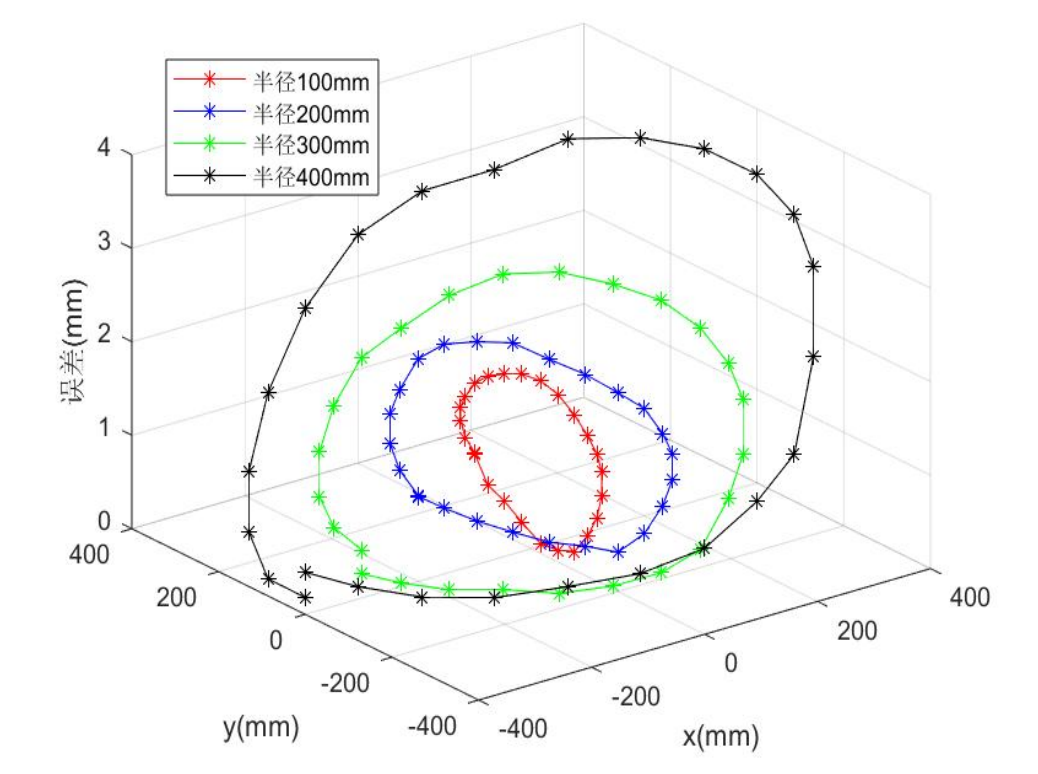
3. 视觉测量误差
机械臂运动的工作范围越大,测量到的离散点的位置误差就越大,这是因为机械臂末端位置距离相机光学中心越远,视场畸变误差就越明显,导致测量误差就会越大。即使经过图像畸变处理,视觉测量系统仍可能出现系统误差。因此,随着机械臂运动范围的扩大,视觉测量系统的测量误差也有增加的趋势
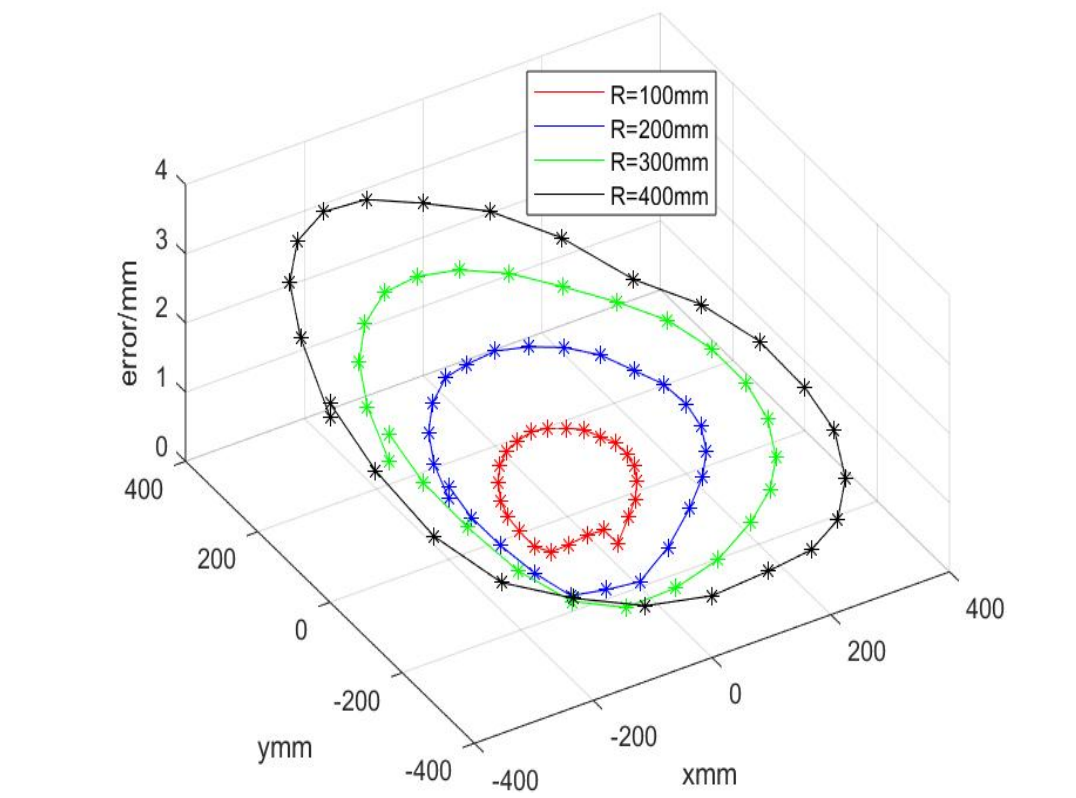
4. 激光测量误差
为了获得视觉测量系统测量机械臂末端位置运动时的视觉测量误差,使用激光跟踪仪在同一轨迹上进行测量,以其测量结果作为基准。本实验使用激光跟踪仪测量机械臂在半径分别为 100mm、200mm、300mm、400mm 的圆形轨迹上的25 个点位,测量机械臂的运动误差。然后将激光跟踪仪的测量数据与理论位置进行比较,计算两者的差值,得到激光跟踪仪的测量结果。激光测量数据包括实际机械臂运动误差和激光跟踪仪测量误差(在本文中是以激光跟踪仪的高精度为基准,所以激光跟踪仪的测量误差忽略不计)。
通过激光跟踪仪的高精度测量来评估视觉的测量精度,并补偿视觉的测量误差。将视觉测量系统测量机械臂末端位置的数据与激光跟踪仪的数据进行比较,以判断视觉测量系统测量的精度。采用激光跟踪仪的高精度测量方法,评估该视觉测量系统的测量效果,将视觉测量系统测量得到的机械臂末端位置数据和激光跟踪测量得到的相应位置数据进行比较
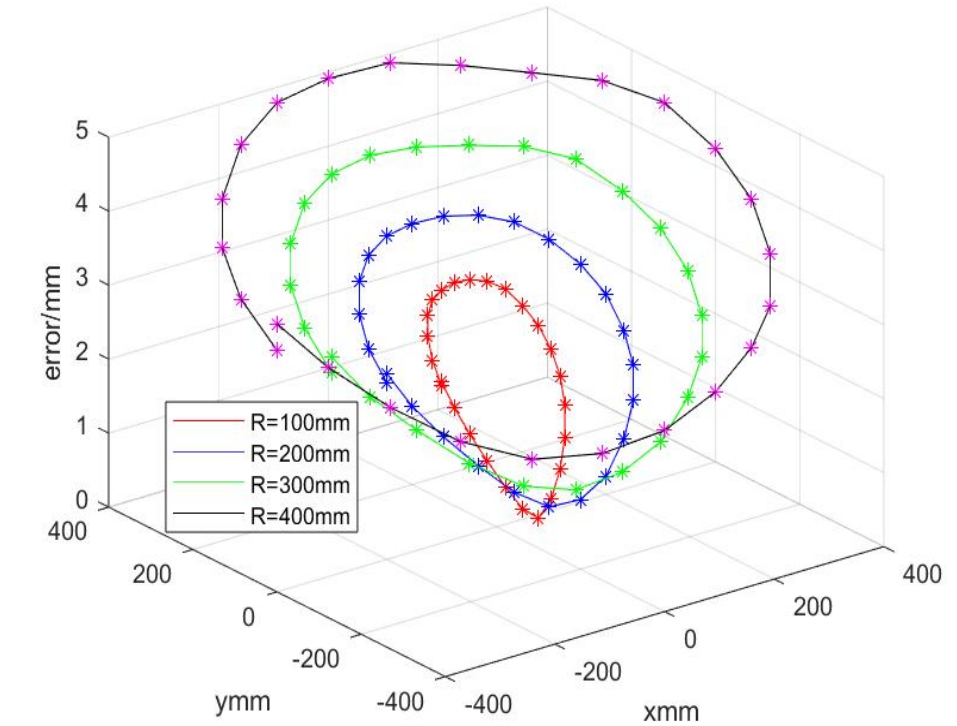
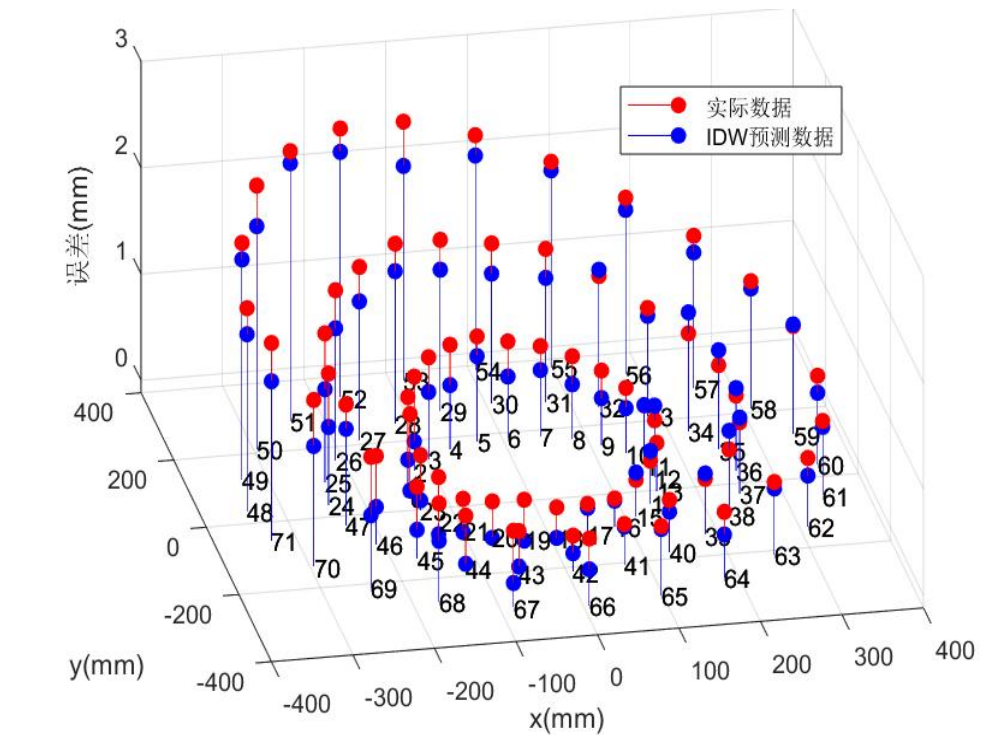
5. 插值预测方法(IDW)提升视觉测量精度
插值预测方法对整个运动平面的视觉测量误差进行插值预测,并使用激光跟踪仪测量一系列机械臂末端位置的运动误差数据与预测数据进行对比,检验插值预测方法预测的效果,从而得到此方法对视觉测量系统的精度提升效果,空间插值方法可以大致推断出整个视觉测量平面的视觉测量误差分布。抽取部分预测点位的视觉测量误差与实际测试得到的视觉测量误差进行做对比。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-07,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号