扫地机器人核心原理


REF:家庭扫地机器人市场需求及发展趋势分析 REF:家用扫地机器人技术发展现状
近期新闻看到iRobot正式申请破产,这个一度风靡全球的扫地机器人终于退出历史舞台,但是他带来的一众国内扫地机器人的厂家仍旧还在披荆斩棘的路上。

4cb617fb1531dd1112bad036e09c37f4.png
1. 发展历程
上个世纪,瑞典推出了三叶虫扫地机采用单滚刷作为首次推出的扫地机器人,后20世纪初,美国iRobot推出”边刷+滚刷+吸尘口“的三段式清扫结构,并引入灯塔原理辅助定位,之后陆续有公司开始采用摄像头、陀螺仪、360°旋转的激光测距仪及雷达等传感器构建环境地图,并基于地图引入各类路径规划算法制定清扫路线,使得清扫及充电等体验越来越高效合理,目前在规划清扫、自动回充、障碍脱困和APP远程操作方面的研发也已比较成熟。
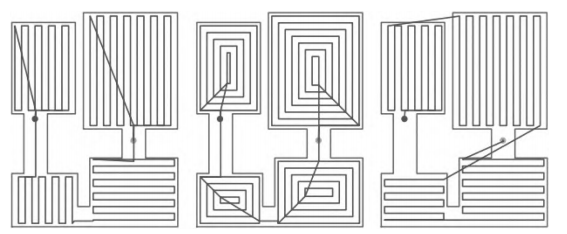
2. 路径规划原理
作为通过路径对区域覆盖的典型应用场景,通常做法是基于二维格栅地图进行离线路径规划,有通过弓字形的算法、有随机区域覆盖-内螺旋逻辑路线法、基于封闭轮廓区域的差异化清洁以及改进A* 算法 等方案实现路径规划
3b67e42cf829855a5e3808066b4dde78.png
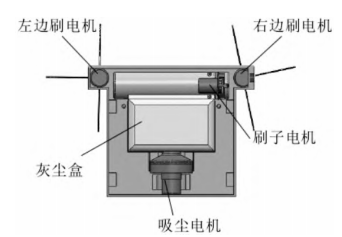
3. 吸尘及清洁模块
作为扫地机器人的核心价值,融合了吸尘和清洁两部分,如下图所示,通过边刷和吸尘两部分组成,吸尘需要在环境清洁能力和使用舒适便捷间中寻求平衡,比如如果选用大吸力的吸尘能力,会因为较大转速带来较大噪声,小转速的噪声小但吸力可能不足。 在粉尘清扫上,有不同的技术方案,,早期是将细小灰尘吸附在过滤网上,大的垃圾灰尘扫入收纳盒,但需要频繁更换过滤网和收纳盒;后续有产品内置了滚动刀头,以便将大在头发及纸片切断吸入收纳盒。
d7be2a9b5b1926cc257f2a0c6f35d072.png
4. 当前发展情况
近些年,国内扫地机器人在感知、定位、智能化、网络等方面取得了长足发展,但仍有一些问题需要优化和改进,比如性价比仍有提升空间、清洁能力及噪声仍需优化、仍存在包括角落空间在内的清扫盲区、以及对于不同区域和垃圾的不同处置能力的提升等。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-12-31,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号