
胡椒机器人:如何将Python地标检测移植到Choregraphe?
我正在编写一个小程序,让Pepper通过Choregraphe检查房间内的地标。用于地标检测的常规Python代码工作正常,但我无法将其移植到Choregraphe.http://doc.aldebaran.com/2-5/dev/python/examples/vision/landmark.html。
根据这个视频,我已经可以在Choregraphe中导入简单的Python,但是在使用地标检测时总是会出现错误。https://www.youtube.com/watch?v=orDWxHQxw5s
这段代码
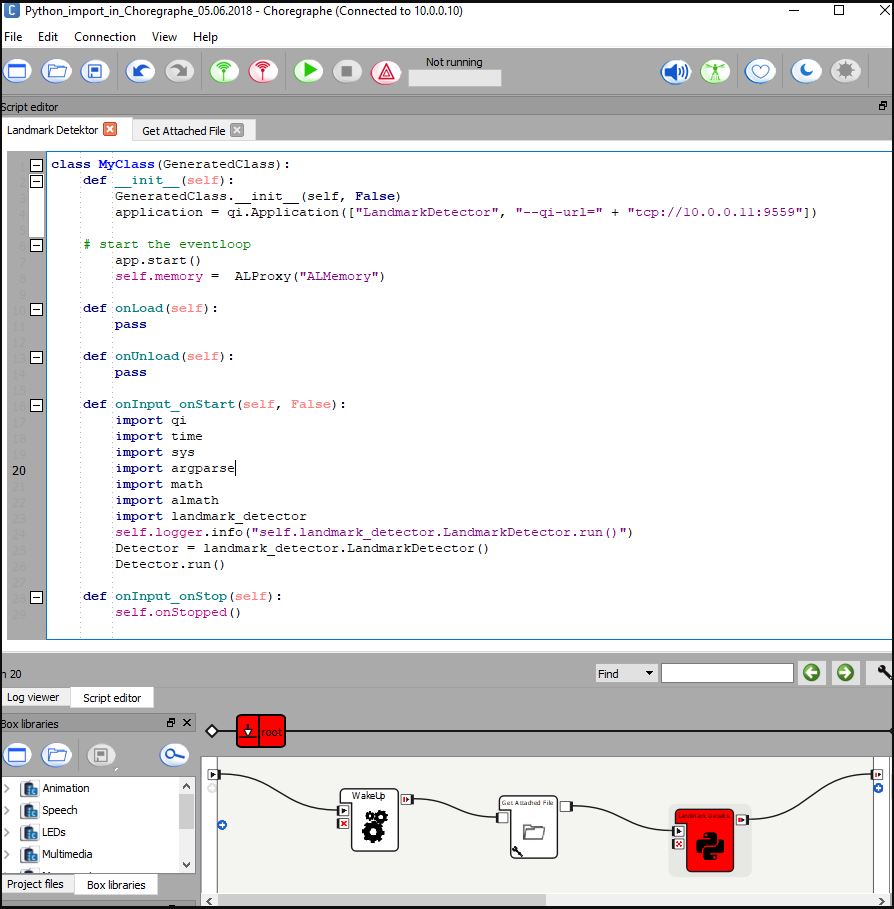
提供此错误消息:
[ERROR] behavior.box :createPythonModule:0
_Behavior__lastUploadedChoregrapheBehaviorbehavior_11118986952:/Landmark
Detektor_1: Box creation failed with the error: <type
'exceptions.RuntimeError'> Application was already initialized如何成功地将Python地标检测移植到Choregraphe代码?
你好,弗雷德里克
回答 1
Stack Overflow用户
发布于 2018-06-19 14:30:49
我不建议直接在Choregraphe中执行太多的自定义Python。当然,这是可能的,但它通常很难调试和维护。
这两种工作方式不同的原因是,独立的Python脚本必须处理到机器人的连接、会话管理等,所有这些都已经在Choregraphe中执行Python时处理了。
因此,有些方法:
- 就像你正在做的那样,试着在一个编舞盒里做这件事。我不推荐它,但基本上您不需要
qi.Application,在一个盒子里,您可以使用self.session()(而不是独立的Python中的application.session或ALProxy )进行会话。这是可行的,但是很难用源代码管理来跟踪您的项目,也很难对它进行调试(例如,如果您在某个地方有一个无限循环,即使行为停止了,并且您的所有日志都在所有其他NAOqi日志的中间丢失,它也可以继续运行)。 - 将您的代码放在外部库中(没有qi.Application等)在Choregraphe中:将该库的路径附加到sys.path,以便您可以导入并使用它。这将使代码更易于维护和组织,但仍然存在同样的问题(但我仍然看到它在成功的应用程序中使用)。
- 让您的代码在Choregraphe之外作为一个进程执行--这一次您需要保留qi.Application()等,并从Choregraphe触发该脚本。您可以看到一个在机器人起跳器中工作的例子,特别是"pythonapp“项目,它名义上是Choregraphe行为,但它所做的只是启动外部脚本,其中包含了所有的逻辑(如果脚本崩溃,它会停止应用程序,如果应用程序停止,它就会停止脚本,没有机会像使用Choregraphe那样运行幽灵python代码,您的日志也在自己的
/var/log/naoqi/servicemanager/文件中)。这就是我通常做的。
(编辑以添加)最后一种方法的一个优点是,您可以在您的工作计算机上运行独立的Python脚本(将-qi您的辣椒-ip作为命令行参数传递),同时测试它(因此您可以在您最喜欢的IDE中直接获得所有的日志,只有这些日志),一旦您对结果满意,就用Choregraphe将其安装到机器人上。
https://stackoverflow.com/questions/50929031
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号