
使‘`ScrewJoint`’更符合机械手
我正在进行一项模拟,其中包括:
- 一种螺栓,垂直焊接在
world上 - 螺母,通过
ScrewJoint连接到螺栓上。螺母的质量设置为0.02公斤,惯性为对角线1.1e-9 *I。这是通过一个.sdf文件配置的。 - 一个伊瓦机械手,这是目前的一个点。
问题是,这个螺母很难操作,我找不到一个可以调整的参数,这可以使它更逼真。更具体而言:
- 我测量在水平平面上切向螺母的力的能力,使连接螺母和螺栓的接头产生螺旋运动。
- 我希望在较低的力下有更多的运动,但到目前为止,我还没有做到这一点。
- 我对这样做的兴趣不是无所事事的;我对更复杂的模拟感兴趣,当
iiwa与这个接口接触时,这些模拟也会失败;我已经询问过那些这里和这里。 (都部分回答了)。在这里总结一下:当机械手抓住螺母时,螺母以这样的方式与螺母搏斗,使得schunk夹持器被迫松开,iiwa被抛出轨道,但螺母保持静止。 - 为了更好地说明这个问题,我附上以下两个简单的实验:
1.使用ExternallyAppliedSpatialForce在水平平面上施加200N力。
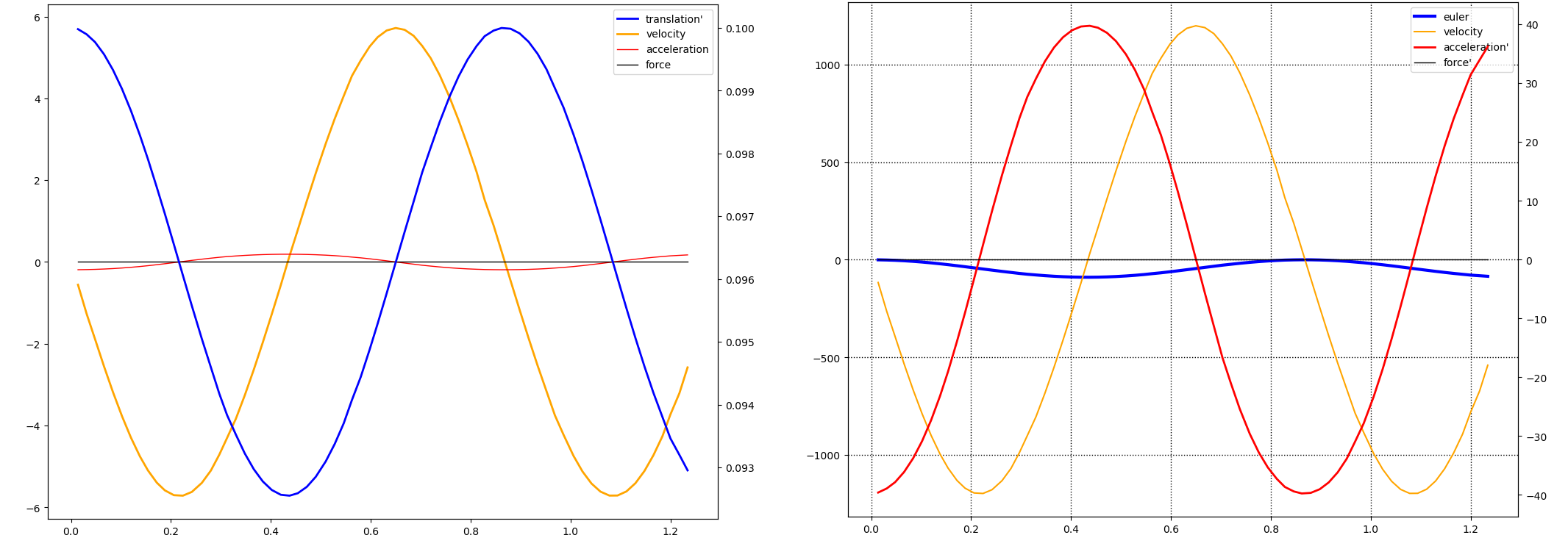
图表示法:(这里和下面)左图包含沿世界Z轴的线性量(m、m/s等),右图包含围绕世界Z轴的角量(以度、deg、deg/s等为单位)。带有后置撇号的图例条目使用二级Y轴刻度;其他图例条目使用主Y轴刻度。
实验总结:
这就像预期的那样,200 N就足以使螺母在螺栓上旋转,导致螺母沿着螺栓垂直运动不到1厘米,旋转超过90度。注:外力没有出现在我的图表上。
2.用iiwa和一个简单的位置控制器在水平平面力中切向施加。
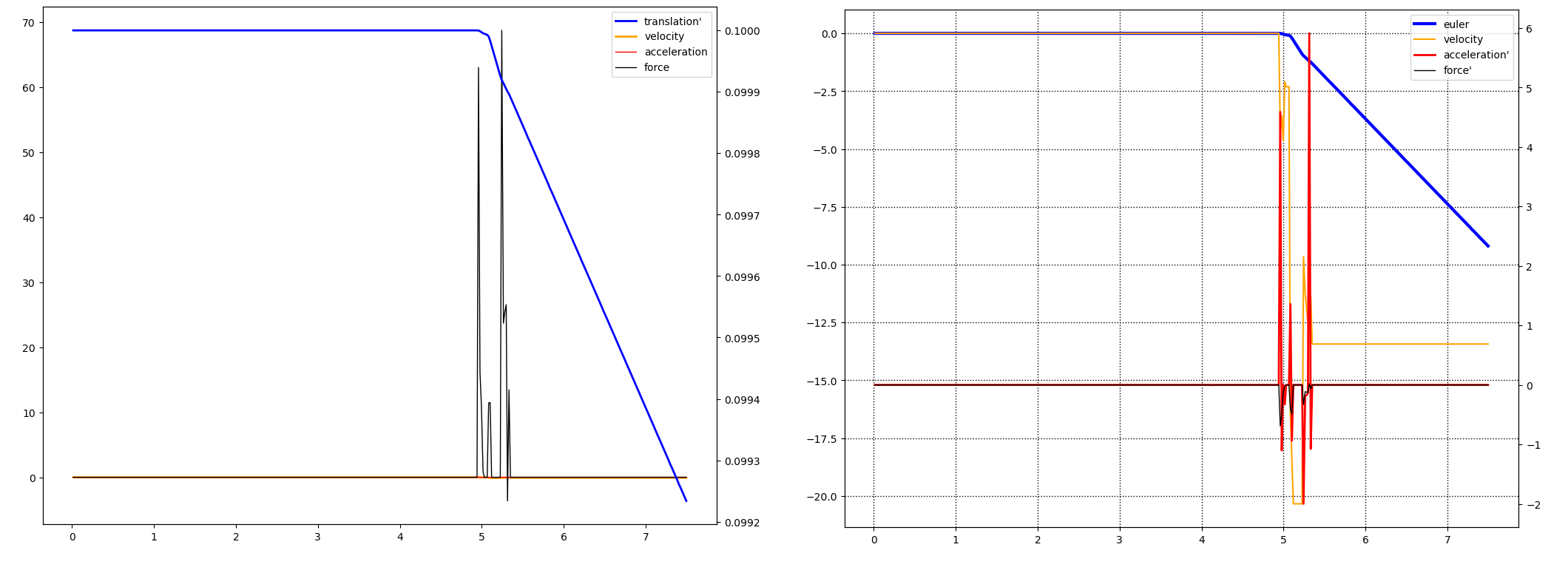
实验总结:这里的力与以前的大致相同:70N沿tz,但在tx和ty中更高(170N),尽管现在只应用了一小段时间。坚果只运行几度或百分之一厘米。这一不成功的互动视频如下,接触力是可视化的使用ContactVisualizer。
请告诉我如何使这个screw_joint更加兼容?
在这些实验中,我尝试了改变螺母的mass和inertia (不同的数量级),这似乎是在缩放接触力,但不影响接触后螺母的加速度或速度。
回答 2
Stack Overflow用户
发布于 2022-10-24 13:30:01
我喜欢你的实验,使用ExternallyAppliedSpatialForce来获得一个比例的概念,虽然我没有完全了解这个设置的细节。
不过,吸引我眼球的是天平,你可以用笔和纸来估计:
- 你的惯性是1e-9公斤⋅米?!从你和iiwa的相互作用来看,我估计半径是1cm,用它你可以得到2e-6公斤的⋅平方米,大三个数量级。
- 在一个20克螺母上施加200 N的力会导致10000米/秒的加速度。作为参考,那是地球引力加速度的1000倍!
这些数字正确吗?另外,如果您碰巧有快速交互(您是吗?),您可能需要估计一个对您的应用程序有意义的时间步骤。
希望这能帮上忙!
Stack Overflow用户
发布于 2022-11-06 19:18:52
好的是我已经修好了;坏的是:我不明白解决办法。
让我们重申我正在处理的一个问题:一个被操纵的对象对ExternallyAppliedSpatialForce的反应是可以预见的,但是不能通过与操纵者的接触来移动。
所做的工作:
- 我已经更新了德雷克从
2f340192a9dc79110410faf8a6d54a8615ddca92(大约2022年8月22日)到42448c0af1b39f0c46f760e7ae37d77097689ad3(大约2022年11月3日) - 更新后,我的实验设置用断言
Actuation input port for model instance ... must be connected破坏了。[类似于这问题中提出的问题]。我的做法是这样的:
bolt_n_nut_ = internal::AddAndWeldModelFrom(sdf_path, "nut_and_bolt",
plant_->world_frame(),
"bolt", X_WC, plant_);然后在后面的ManipulationStation::Finalize
auto zero_torque = builder.template AddSystem<systems::ConstantVectorSource<double>>(
Eigen::VectorXd::Zero(1));
builder.Connect(zero_torque->get_output_port(),
plant_->get_actuation_input_port(bolt_n_nut_));- 随着上述变化,操作和操作开始与机械手交互:
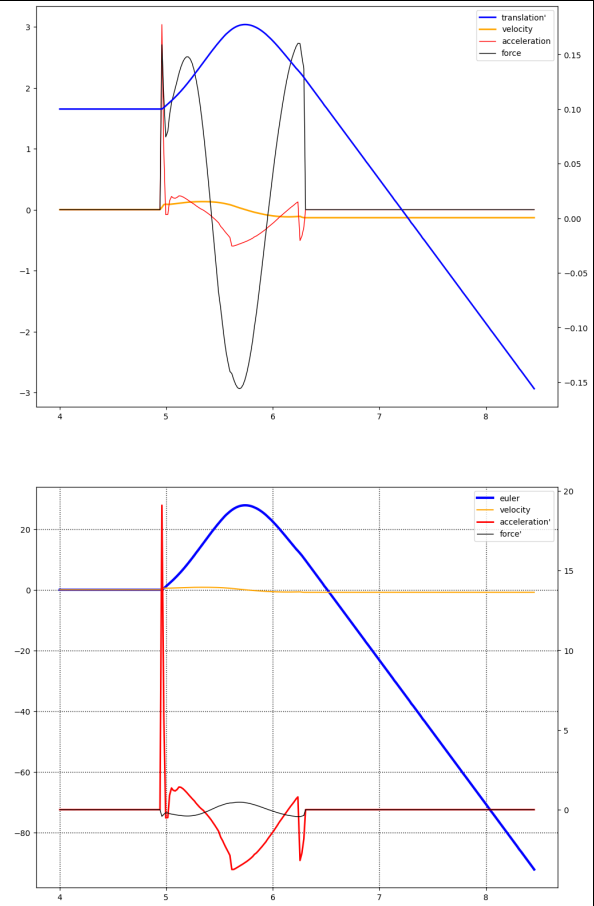
图中要注意的事项:
- 操纵者移动的距离从几毫米增加到了几十厘米。视频显示一个螺母变得容易操作。
- 这种交互违反了的
ScrewJoint约束,即操作和沿着它的轴移动,没有太多的旋转。
https://stackoverflow.com/questions/74159401
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号