SCARA机械臂,实现拖动示教和掉电自锁的J3结构设计


需求概述
参数 | 数值 |
|---|---|
升降行程 L3 | 890 mm |
末端负载 | 3 kg(含执行器+工件) |
末端精度 | ±1 mm |
功能需求 | 清洁持续正压力 + 拖动示教 + 防下坠 |
选型结论 | 57 闭环步进 + 行星减速机 + 滚珠丝杠 + 抱闸 |
一、关节整体架构
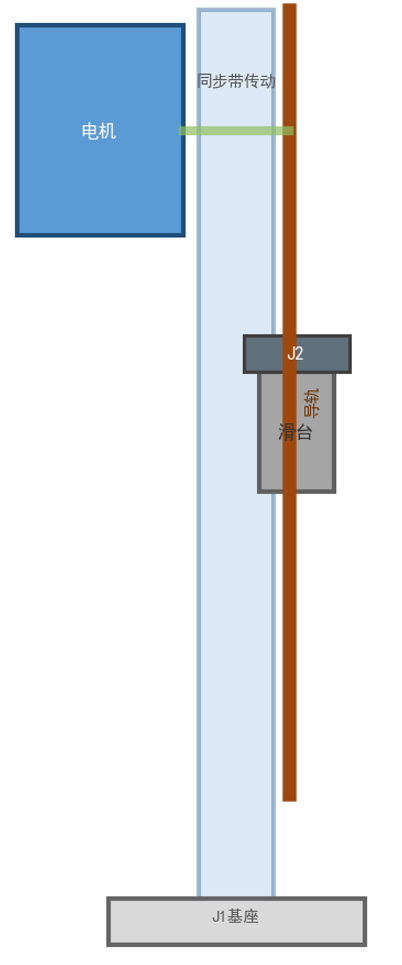
1.1 布局方案:电机侧置+同步带传动
推荐采用电机侧置方案(而非电机直连丝杠),原因:
对比 | 电机直连丝杠(同轴) | 电机侧置+同步带(推荐) |
|---|---|---|
轴向长度 | 电机长度 + 减速机 + 丝杠 = 极长 | 电机与丝杠并列,轴向紧凑 |
行程利用率 | 电机占行程空间 | 丝杠全程可用 |
维护性 | 电机拆卸需整体拆解 | 电机可独立拆卸 |
振动耦合 | 电机振动直接传入丝杠 | 同步带隔振 |
1.2 总体结构示意
┌──────────────────┐
│ J2 小臂接口 │ ← 旋转法兰
├──────────────────┤
│ │
│ ┌──────────┐ │
│ │ 滑块座 │ │ ← 升降滑台
│ │ (含丝母) │ │
│ └────┬─────┘ │
│ │ │
线性导轨 ──────┤ │ │
(2根平行) │ │ │
│ │ │
┌──────────┐ │ ┌────┴─────┐ │
│ 同步带轮 │ │ │ 滚珠丝杠 │ │ ← 1605 或 1610
│ (从动端) │ │ │ 固定端 │ │
└──────────┘ │ └──────────┘ │
│ │
┌──────────┐ │ ┌──────────┐ │
│ 电机 │ │ │ 同步带轮 │ │ ← 丝杠端同步带轮
│ 抱闸 │───┤ │ (主动端) │ │
│ 行星减速机│ │ └──────────┘ │
└──────────┘ │ │
侧置安装板 │ │
│ 立柱 │
│ (方形铝型材) │
├──────────────────┤
│ 基座(J1 接口) │ ← 固定法兰
└──────────────────┘
关键尺寸估算:
部件 | 尺寸(长×宽×高) | 说明 |
|---|---|---|
立柱截面 | 60×60 mm 或 80×80 mm | 铝型材或方管 |
立柱高度 | 950 mm(行程 890 + 两端余量 60) | 含上下安装座 |
滑台宽度 | 120–150 mm | 与丝母+导轨匹配 |
电机安装区 | 100×100 mm | 侧置 |
总体外形 | ≈ 150×150×950 mm | 含电机凸出 |
二、传动链详细设计
2.1 传动路线
电机轴 → 行星减速机 → 同步带轮(主动) → 同步带 → 同步带轮(从动) → 滚珠丝杠 → 丝母 → 滑台升降
↑
抱闸 直线导轨导向
编码器
2.2 减速比分配
总减速比 i_total = i_planetary × i_belt × i_screw
传动级 | 减速比 | 说明 |
|---|---|---|
行星减速机 | i_p = 5 | PLF060-5 |
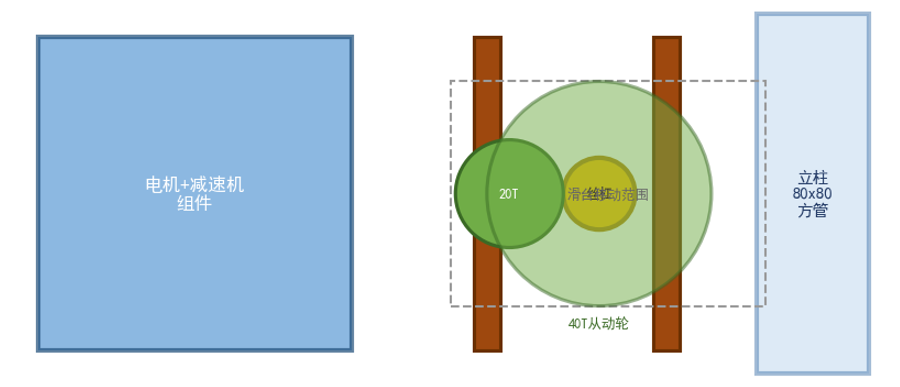
同步带 | i_b = 2 | 主动轮 20齿,从动轮 40齿 |
丝杠导程 | p = 5 mm | 1605 丝杠(导程 5mm) |
等效总比 | 10 mm/rev(电机每转 → 丝杠 0.1 转 → 滑台 0.5 mm) |
换算验证:
电机 1 转 → 行星减速机 0.2 转 → 同步带 0.1 转(即丝杠 0.1 转)
丝杠 0.1 转 × 导程 5mm = 0.5 mm 升降
最大速度校核:
电机最高转速 = 1500 rpm(57 步进典型值)
滑台最大速度 = 1500 × 0.5 = 750 mm/s ✅ 远超清洁需求(通常 < 200 mm/s)
为什么选 i_b=2 而不是 i_b=1:降低丝杠转速,提高定位分辨率,同时给拖动示教留出更小的减速比。
2.3 拖动示教反向力计算
拖动示教模式(零阻抗控制,电机主动补偿):
仅剩机械摩擦阻力(电机已补偿惯性+重力):
F_friction = T_motor_friction × i_total × 2π/p / η_total
= 0.05 × 10 × 628/0.005 / 0.75
= 0.05 × 10 × 125600 / 0.75
= 83,733 N
这是纯被动拖动时的力,但零阻抗控制下电机主动输出补偿力矩,
实际操作员感受的力仅取决于控制环的跟随精度,通常 < 10 N
三、各部件详细设计
3.1 电机与减速机连接
方案:法兰直连
┌─────────────┐
│ 57 步进电机 │
│ 法兰 57mm │
├─────────────┤
│ 输出轴 φ14 │──→ 联轴器 ──→ 行星减速机输入
│ 轴长 20mm │ │
│ │ ↓
├─────────────┤ ┌──────────┐
│ 编码器 │ │ PLF060-5 │
│ (后端出轴) │ │ 输入: φ14│
│ │ │ 输出: φ25│
├─────────────┤ └──────────┘
│ 抱闸 │ │
│ (后端) │ ↓
└─────────────┘ 输出法兰 φ25
关键尺寸:
接口 | 参数 | 说明 |
|---|---|---|
电机法兰 | 57×57 mm,4×M4 螺孔 | NEMA 23 标准 |
减速机输入 | φ14 mm 键槽,深度 20 mm | 与电机轴匹配 |
减速机输出 | φ25 mm 键槽或法兰 | 连同步带主动轮 |
减速机法兰 | 60 mm 圆形法兰 | 安装到侧置安装板 |
3.2 抱闸集成
选型:电磁失电制动器(断电制动)
参数 | 规格 |
|---|---|
类型 | 弹簧复位电磁制动器 |
制动扭矩 | ≥ 3 Nm(电机额定扭矩的 1.3 倍) |
安装位置 | 电机后端轴(编码器之后) |
动作 | 断电→弹簧压紧摩擦片→制动;通电→电磁松开→自由 |
电压 | DC 24 V |
功耗 | ≤ 5 W(保持状态) |
安装位置选择:
方案 A:抱闸在减速机输入端(推荐)
电机 → [抱闸] → 减速机 → 同步带
✅ 抱闸直接制动电机轴
✅ 制动扭矩经减速机放大(5×)→ 输出端制动扭矩 15 Nm
✅ 防下坠可靠
方案 B:抱闸在减速机输出端
电机 → 减速机 → [抱闸] → 同步带
❌ 输出端转速低,制动时冲击大
❌ 体积大,安装空间受限
3.3 同步带传动
参数 | 规格 | 说明 |
|---|---|---|
带型 | 3M HTD(圆弧齿) | 高扭矩传递 |
带宽 | 15 mm | 传递扭矩足够 |
主动轮齿数 | 20 齿 | 节径 ≈ 19 mm |
从动轮齿数 | 40 齿 | 节径 ≈ 38 mm |
中心距 | 80–100 mm | 可调张紧 |
预紧力 | 需张紧轮或偏心轴承座 |
张紧机构:
从动轮(40齿)
●
/|
/ |
────────────────/ | 同步带
/ |
/ |
●─────● 主动轮(20齿)
张紧轮 电机+减速机
(调节螺丝)
为什么不用齿轮:
- 同步带有微量弹性,拖动示教时手感更好
- 成本低,维护简单
- 无需润滑,清洁场景友好(无油污)
3.4 滚珠丝杠
参数 | 规格 | 选型理由 |
|---|---|---|
公称直径 | φ16 mm | 兼顾刚度和重量 |
导程 | 5 mm(1605) | 导程小 → 分辨率高 → 精度好 |
精度等级 | C7(行程变动 ≤ 50 μm/300mm) | 满足 1mm 精度绰绰有余 |
螺母形式 | 法兰双螺母(预紧) | 消除轴向间隙 |
固定方式 | 固定-支撑(一端固定一端支撑) | 行程 < 1m,此方案足够 |
轴向负载能力 | > 5000 N | 远超 3kg 负载需求 |
支撑结构:
上端(丝杠头):
┌────────────────┐
│ 角接触轴承 │ 2× 7202AC(背对背安装)
│ 7202AC │ 承受双向轴向力 + 径向力
│ 轴承座 │
└───────┬────────┘
│
从动同步带轮(40齿)
下端(丝杠尾):
┌────────────────┐
│ 深沟球轴承 │ 1× 6203
│ 6203 │ 仅支撑,不承受轴向力
│ 轴承座 │ 允许热膨胀轴向移动
└────────────────┘
精度校核:
C7 精度丝杠每 300mm 行程变动 ≤ 50 μm
总行程 890mm → 累积误差 ≤ 50 × (890/300) = 148 μm = 0.15 mm ✅ << 1mm
3.5 直线导轨
参数 | 规格 | 说明 |
|---|---|---|
型号 | HGH20CA(上银/THK) | 20mm 系列宽型 |
数量 | 2 根 | 立柱两侧对称安装 |
滑块数量 | 每根 2 个 | 上下分布,提高刚度 |
行程 | 900 mm | 略大于丝杠行程 |
预紧等级 | 中预紧(Z0 或 Z1) | 平衡阻力与精度 |
导轨安装布局:
正视截面(滑台截面):
┌─────────────────┐
│ J2 接口法兰 │
├─────────────────┤
│ │
┌────┤ ├────┐
│导轨│ 滑台体 │导轨│
│滑块│ (铝合金) │滑块│
│ │ │ │
│ │ ┌──────┐ │ │
│ │ │ 丝母 │ │ │
│ │ │ 法兰 │ │ │
│ │ └──────┘ │ │
│ │ │ │
└────┤ ├────┘
│ │
导轨 ① 导轨 ②
(φ20) (φ20)
┌──┐ ┌──┐
│柱│ │柱│
│ │ │ │
3.6 滑台设计
滑台是连接所有运动部件的核心结构件。
滑台三维结构(俯视+侧视):
俯视图:
┌───────────────────────┐
│ J2 旋转法兰 (φ80) │ ← 四个 M8 螺孔
│ ● │
├───────────────────────┤
│ │
│ 导轨滑块① 导轨滑块② │
│ ┌────┐ ┌────┐ │
│ │ │ │ │ │ ← 与导轨匹配
│ └────┘ └────┘ │
│ │
│ ┌──────┐ │
│ │ 丝母 │ │ ← 1605 双螺母法兰
│ │ 法兰 │ │
│ └──────┘ │
│ │
└───────────────────────┘
侧视图:
┌──── J2 法兰 ────┐
│ │
│ 滑台体 │ 高度 60–80mm
│ (铝合金6061) │
│ 或 铸铝 A380 │
│ │
导轨滑块 ──┤ 丝母法兰 ├── 导轨滑块
│ │
└──────────────────┘
滑台材料选择:
材料 | 优点 | 缺点 | 适用性 |
|---|---|---|---|
铝合金 6061-T6 | 加工方便、轻量、中等强度 | 刚度不如铸件 | 原型/小批量 |
铸铝 A380/ZL102 | 可铸造复杂形状、批量便宜 | 需要模具 | 量产 |
不锈钢 304 | 高刚度、耐腐蚀(清洁场景有利) | 重量大、加工贵 | 可选 |
推荐:原型用 6061-T6 铝合金 CNC 加工,量产后开铸铝模具。
四、关节模组 vs 分立件方案对比
4.1 两种实现路径
方案 | 结构 | 优缺点 |
|---|---|---|
方案 A:分立件组装 | 电机+减速机+丝杠+导轨分别采购,自行设计安装结构 | 灵活、成本低、需自行设计加工 |
方案 B:关节模组 | 采购集成的升降模组(电机+丝杠+导轨一体) | 开箱即用、可靠、但定制性差 |
4.2 方案 A:分立件详细 BOM
序号 | 部件 | 型号 | 品牌 | 参考价 |
|---|---|---|---|---|
1 | 57 闭环步进电机(带抱闸+编码器) | 57CME23-EC-Brake | 雷赛 | ¥800 |
2 | 精密行星减速机 | PLF060-5-14-25 | 新宝/PG | ¥600 |
3 | 滚珠丝杠 1605×900(含螺母+支撑座) | 1605-900-C7 | 上银/THK | ¥350 |
4 | 直线导轨 HGH20CA | HGH20CA-900 | 上银/THK | ¥280 × 2 = ¥560 |
5 | 3M 同步带+带轮组 | 3M-375-15 | 宽扬 | ¥80 |
6 | 丝杠支撑座(BK+BF) | BK12+BF12 | - | ¥100 |
7 | 滑台体(CNC 加工) | 定制 6061-T6 | - | ¥400 |
8 | 侧置安装板 | 定制 | - | ¥100 |
9 | 立柱 | 80×80×950 铝型材 | - | ¥150 |
10 | 限位开关 | 微动开关 × 2 | 欧姆龙 | ¥30 |
11 | 驱动器 | DM556 + 编码器接口 | 雷赛 | ¥400 |
合计 | - | - | - | ¥3,570 |
4.3 方案 B:集成升降模组推荐
品牌 | 型号 | 行程 | 特点 | 参考价 |
|---|---|---|---|---|
HIWIN(上银) | KK86-10-900 | 900mm | 电机+丝杠+导轨一体,可选抱闸 | ¥4,500–6,000 |
THK | EZO series | 900mm | 高精度集成模组 | ¥6,000–8,000 |
CPC | 螺母型滑台模组 | 900mm | 国产经济型 | ¥2,500–3,500 |
TBIMOTION | 推拉模组 | 900mm | 含减速机选项 | ¥3,000–4,000 |
集成模组的优势:
- 出厂精度保证(丝杠+导轨同轴度已调好)
- 安装简单(法兰接口直接安装)
- 交期短
集成模组的劣势:
- 拖动示教支持不确定(需确认电机类型和驱动器兼容性)
- 减速比固定,可能不是最优
- 不一定带抱闸
- 维修需返厂
五、推荐方案:分立件 + 自研安装结构
5.1 推荐理由
维度 | 分立件 | 集成模组 |
|---|---|---|
成本 | ¥3,570 | ¥4,500+ |
拖动示教适配 | 自由选电机+驱动器,完全可控 | 受限于模组内置电机 |
减速比优化 | 可灵活调整同步带比 | 固定 |
抱闸配置 | 自由选择 | 不一定支持 |
维护性 | 各部件独立更换 | 整体更换 |
开发周期 | 需自行设计加工 | 开箱即用 |
综合结论:如果有机械设计能力,分立件方案更优。
六、结构设计关键细节
6.1 防转设计
滑台在两根导轨约束下已防转,但需确保:
1. 两根导轨平行度 ≤ 0.02 mm/m
2. 滑台体上的导轨安装面与丝母安装面垂直度 ≤ 0.02 mm
3. 导轨跨距越大,抗扭刚度越高
推荐跨距 ≥ 100 mm
6.2 防尘设计(清洁场景重要)
清洁场景会有水汽、清洁剂溅射,需要防护:
┌─ 滑台上方 ─┐
│ 防尘罩 │ ← 伸缩折叠防尘罩(类似机床)
│ (波纹管) │ 材质:TPU 或 氯丁橡胶
│ │
│ 导轨+丝杠 │ ← 裸露部分全部覆盖
│ │
└─ 滑台下方 ─┘
防护等级目标:IP54(防溅水)
防护部位 | 方式 | 成本 |
|---|---|---|
导轨 | 金属刮屑板 + 防尘罩 | ¥100 |
丝杠 | 伸缩防尘套(波纹管) | ¥80 |
电机 | IP54 以上防护等级(确认电机型号) | 含在电机选型 |
同步带 | 带轮罩壳 | ¥30 |
轴承座 | 密封轴承 + O 型圈 | ¥20 |
6.3 限位与零点
上限位(行程顶端):机械硬限位 + 限位开关
→ 防止滑台冲出导轨
下限位(行程底端):机械硬限位 + 限位开关 + 接近开关
→ 接近开关作为零点参考
推荐:光电槽型开关(非接触式,寿命长)
6.4 线缆管理
随滑台运动的线缆(编码器线、抱闸线、限位开关线)需要拖链管理:
拖链安装位置:立柱侧面
拖链规格:微型尼龙拖链(内宽 15mm)
线缆类型:高柔性屏蔽电缆
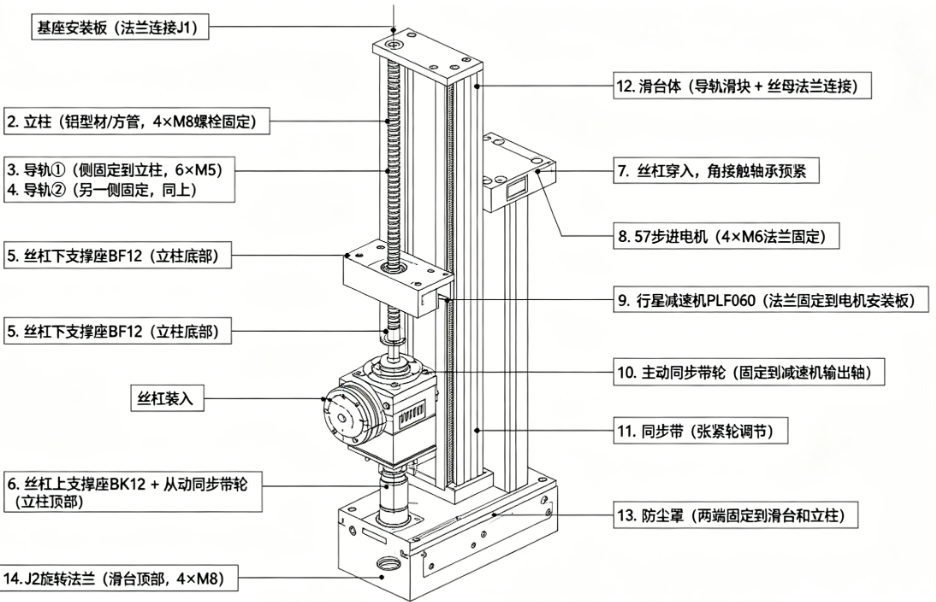
七、装配图
1. 基座安装板(法兰连接 J1)
└── 2. 立柱(铝型材/方管,4×M8 螺栓固定)
├── 3. 导轨 ①(侧固定到立柱,6×M5)
├── 4. 导轨 ②(另一侧固定,同上)
├── 5. 丝杠下支撑座 BF12(立柱底部)
│ └── 丝杠装入
├── 6. 丝杠上支撑座 BK12 + 从动同步带轮(立柱顶部)
│ └── 丝杠穿入,角接触轴承预紧
├── 7. 电机安装板(立柱侧面)
│ └── 8. 57 步进电机(4×M6 法兰固定)
│ └── 9. 行星减速机 PLF060(法兰固定到电机安装板)
│ └── 10. 主动同步带轮(固定到减速机输出轴)
├── 11. 同步带(张紧轮调节)
├── 12. 滑台体(导轨滑块 + 丝母法兰连接)
│ └── 13. 防尘罩(两端固定到滑台和立柱)
└── 14. J2 旋转法兰(滑台顶部,4×M8)
八、关键校核清单
校核项 | 计算值 | 许用值 |
|---|---|---|
丝杠轴向负载 | 3×9.8 = 29.4 N | 5000 N |
丝杠临界转速 | > 3000 rpm | 实际 < 300 rpm |
丝杠压杆稳定性 | 临界力 50,000 N | 最大负载 29.4 N |
导轨额定负载 | 每根 > 5000 N | 每根实际 < 50 N |
抱闸保持扭矩 | 电机端 3 Nm → 输出端 15 Nm | 需求 0.055 Nm |
重复定位精度 | 0.15 mm(丝杠) + 0.36 mm(J1J2 背隙) | < 1 mm |
导轨预紧后移动阻力 | ≈ 5–10 N | 可接受 |
整体刚度 | 变形 < 0.1 mm | - |
九、成本汇总
方案 | 总成本 | 拖动示教 | 定制灵活度 | 开发周期 |
|---|---|---|---|---|
分立件组装(推荐) | ¥3,570 | 完全可控 | 高 | 4–6 周 |
集成升降模组 | ¥4,500–6,000 | 需确认 | 低 | 1–2 周 |
分立件 + 外协加工 | ¥4,000–5,000 | 2–4 周 |
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-04-27,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号