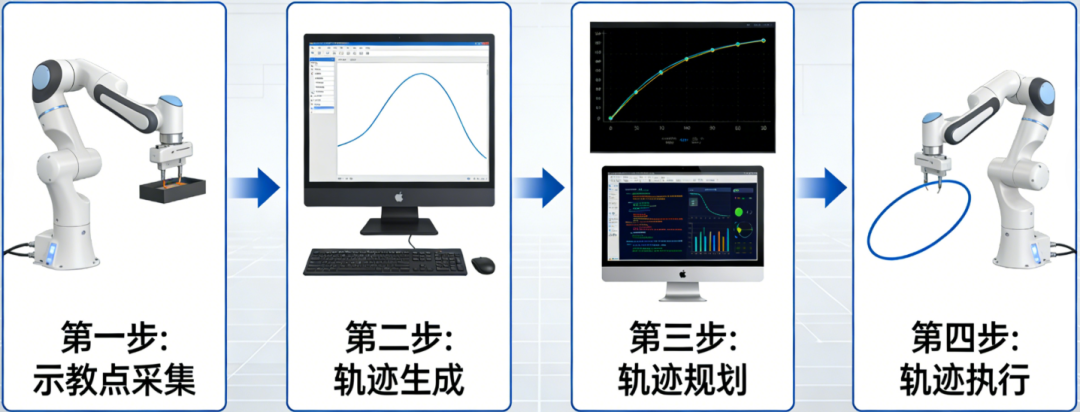
从示教到柔顺轨迹的生成、规划全流程设计


一、整体流程概述
1.1 示教到执行的完整链路
示教到执行的完整链路:
─────────────────────────────────────────────────────
[物理世界] [数字世界]
│ 拖动示教 │
▼ ▼
示教点采集 ──────────────────► 示教数据存储
(6关节角度) (JSON/YAML文件)
│ 正运动学计算 │
▼ ▼
末端位置标定 ─────────────────► 笛卡尔空间验证
│ 曲线插值 │
▼ ▼
关节轨迹生成 ─────────────────► 关节角度序列
(每关节独立) (100Hz, N×6数组)
│ S型速度规划 │
▼ ▼
时间参数化 ───────────────────► 带时间戳的轨迹
│ 固定频率发送 │
▼ ▼
CAN总线 ──────────────────────► 一体化关节
(100Hz目标角度) (1000Hz位置环)
│ 关节执行 │
▼ ▼
末端执行 ──────────────────────► 清洁轨迹完成
1.2 数据流向图
数据流向:
─────────────────────────────────────────────────────
示教数据(5–10个点)
1. 数据预处理 │ ← 质量检查、坐标统一、单位转换
2. 曲线规划 │ ← 三次样条插值
3. 速度规划 │ ← S型速度曲线
4. 轨迹预生成 │ ← 固定频率采样(100Hz)
执行控制器(100Hz查表)
CAN总线 ──► 关节驱动器 ──► 电机
二、示教数据的使用方式
2.1 示教数据的结构
示教数据文件结构示例:示教文件 = {
"元数据": {
"示教ID": "inner_wall_v1",
"任务类型": "inner_wall | outer_wall | seat",
"型号": "TOTO_CS325",
"示教日期": "2026-04-08",
"操作者": "张工"
},
"路径点列表": [
{
"编号": 0,
"类型": "approach | contact | path | retreat",
"关节角度": [θ₁, θ₂, d₃, θ₄, θ₅, θ₆],
"末端位置": [x, y, z],
"接触力": F,
"接触状态": true/false
},
...(5–10个点)
],
"质量检查": {
"通过": true/false,
"平均接触力": 5.3,
"平均点间距": 65.2
}
}2.2 示教数据的使用方式
示教数据的两种使用方式:
─────────────────────────────────────────────────────
方式A:直接复用(关节空间)
├─ 示教点直接作为插值节点
├─ 在关节空间进行曲线规划
├─ 优点:简单,无需逆运动学
├─ 缺点:笛卡尔空间轨迹可能与示教有偏差
└─ 适用:清洁贴合(末端始终接触,偏差可接受)
方式B:笛卡尔空间校验(推荐)
├─ 示教点转换为笛卡尔空间
├─ 在笛卡尔空间规划路径(直线/螺旋)
├─ 通过逆运动学映射回关节空间
├─ 优点:笛卡尔空间轨迹精确
├─ 缺点:需要逆运动学,增加复杂度
└─ 适用:需要精确笛卡尔轨迹的场景
清洁贴合任务的推荐方式:方式A(关节空间)
├─ 原因:
│ ├─ 清洁任务只需末端贴合,不要求精确笛卡尔轨迹
│ ├─ 关节空间规划无需逆运动学,实现简单
│ └─ 关节空间轨迹天然满足关节限位约束
└─ 注意:通过力传感器实时修正残余偏差
2.3 示教数据的预处理
示教数据预处理流程:
─────────────────────────────────────────────────────
Step 1:数据完整性检查
├─ 检查点数量(5–10个)
├─ 检查关节角度是否在限位范围内
├─ 检查接触力是否在合理范围(0–15N)
└─ 检查数据格式是否正确
Step 2:异常点过滤
├─ 删除明显的异常记录(如记录时机械臂抖动)
├─ 方法:检查相邻两点的关节角度差是否过大
│ └─ 单关节角度突变 > 10° → 异常,删除该点
└─ 如果删除了异常点,需要重新示教该段
Step 3:点间距优化
├─ 计算相邻示教点的末端距离
├─ 距离 > 100mm → 警告,建议插入中间点
├─ 距离 < 20mm → 警告,点过于密集
└─ 保持合理间距(50–80mm)
Step 4:数据格式转换
├─ 关节角度:度 → 弧度(内部计算用)
├─ 直线关节:mm → m(内部计算用)
├─ 时间戳:统一为相对时间(0, 1, 2, ...秒)
└─ 保存为标准格式
三、轨迹生成原理
3.1 三次样条插值原理
三次样条插值原理:
─────────────────────────────────────────────────────
什么是三次样条插值?
├─ 通过相邻示教点,拟合平滑的曲线
├─ 每两个点之间用三次多项式连接
├─ 保证整条曲线一阶、二阶导数连续
└─ 效果:位置、速度、加速度连续,无突变
为什么用三次样条?
├─ 三次多项式是最低阶的多项式
│ 能保证位置、速度、加速度连续
├─ 计算量适中,适合嵌入式平台
├─ 数值稳定,不易震荡
└─ 在机械臂轨迹规划中广泛使用
三次样条的几何意义:
─────────────────────────────────────────────────────
示教点:P0, P1, P2, P3, ...(关节角度)
曲线段:S0(P0→P1), S1(P1→P2), S2(P2→P3), ...
每段曲线是三次多项式:
S(t) = a + b·t + c·t² + d·t³
约束条件(每段曲线有两个端点):
├─ S(0) = P_start(一阶导数连续)
├─ S(1) = P_end
├─ S'(0) = S'previous(1)(速度连续)
└─ S''(0) = S''previous(1)(加速度连续)
边界条件(自然边界):
├─ 首末端二阶导数为0
└─ 曲线自然弯曲,无额外约束
3.2 弧长参数化原理
弧长参数化原理:
问题:示教时记录的点,参数是什么?
├─ 直接记录:每个点的关节角度
├─ 相邻点的"距离"是什么?
│ └─ 不是时间(示教时不记录时间)
│ └─ 是关节空间的弧长
└─ 弧长 = 关节角度的加权范数
s = sqrt((Δθ₁)² + (Δθ₂)² + ... + (Δθ₆)²)
为什么需要弧长参数化?
├─ 保证各关节运动速度均匀
├─ 避免示教时"快一段慢一段"的问题
├─ 使速度规划与示教速度无关
└─ 轨迹平滑、可控
弧长参数化的步骤:
─────────────────────────────────────────────────────
Step 1:计算各相邻示教点的弧长
├─ s[i] = ||P[i+1] - P[i]||(关节空间距离)
└─ 累积弧长 S[i] = sum(s[0:i])
Step 2:将示教点参数化为弧长
├─ 新参数:P(S[0]), P(S[1]), P(S[2]), ...
├─ 插值在弧长域进行
└─ 插值函数:θ = f(s)
Step 3:S型速度规划在弧长域进行
├─ 计算期望的末端速度曲线 v(s)
├─ 将速度转换为弧长变化率 ds/dt = v(s)
└─ 积分得到 s(t),再查表得到 θ(t)
3.3 多关节同步原理
多关节同步原理:
─────────────────────────────────────────────────────
问题:6个关节独立插值,如何保证同时到达各路径点?
解决:统一时间尺度,按弧长比例分配
示例:
├─ Joint 1:从0°到30°,弧长s₁=30°
├─ Joint 2:从0°到60°,弧长s₂=60°
├─ 假设总时间T=3秒
各关节在相同时间到达终点:
├─ t=0:所有关节在起点
├─ t=3s:所有关节在终点
└─ t=1.5s:所有关节都在50%位置
如何实现?
├─ 每个关节独立计算自己的S型速度曲线
├─ 但所有关节使用相同的"时间进度"
├─ 关节i的位置 = 关节i的S曲线(t/T)
└─ 结果:各关节同时到达各路径点
关键:时间进度是统一的(0→1),但各关节
根据自己的弧长比例映射到实际角度
四、曲线规划方法
4.1 关节空间三次样条规划
关节空间三次样条规划流程:
─────────────────────────────────────────────────────
输入:示教点列表(5–10个),每个点6个关节角度
Step 1:构建插值函数
├─ 对每个关节分别构建三次样条
├─ 参数域:累积弧长
├─ 值域:该关节的角度序列
└─ 输出:6个样条函数 f₁(s), f₂(s), ..., f₆(s)
Step 2:计算总弧长
├─ S_total = sum(相邻点弧长)
└─ 这是参数域的总范围
Step 3:速度规划(见第五章)
├─ 确定末端速度曲线 v(s)
├─ 计算 ds/dt = v(s)
└─ 积分得到 s(t)
Step 4:轨迹查询
├─ 输入:时间t
├─ 计算:弧长s(t)
├─ 查询:各关节角度 θᵢ = fᵢ(s)
└─ 输出:6个关节的目标角度
三次样条的特点:
├─ 位置连续(曲线经过所有示教点)
├─ 速度连续(关节运动无突变)
├─ 加速度连续(无冲击)
├─ 笛卡尔空间轨迹可能与直线有偏差
└─ 实现简单,适合清洁贴合任务
4.2 笛卡尔空间路径校验(可选)
笛卡尔空间路径校验流程:
─────────────────────────────────────────────────────
目的:检查关节空间插值后的笛卡尔空间轨迹是否满足要求
Step 1:关节角度 → 笛卡尔位置
├─ 对每个插值点,计算正运动学
├─ FK(P[i]) = [x, y, z, roll, pitch, yaw]
└─ 得到笛卡尔空间的轨迹点序列
Step 2:计算轨迹偏差
├─ 示教时记录的末端位置序列:P_teach[i]
├─ 插值后的末端位置序列:P_interp[i]
├─ 偏差 = ||P_teach[i] - P_interp[i]||
└─ 偏差应 < 5mm
Step 3:偏差处理
├─ 偏差 < 3mm 通过
├─ 偏差 3–5mm 可接受,需确认
├─ 偏差 > 5mm 偏差过大
│ └─ 解决:增加示教点密度
└─ 偏差 > 10mm 严重问题
└─ 解决:重新示教
为什么允许一定偏差?
├─ 清洁任务只需末端贴合表面
├─ 5mm偏差可被力控制器的柔顺机构吸收
├─ 力传感器会检测接触力,过深则退出
└─ 因此:对笛卡尔轨迹精度要求不高
4.3 路径规划的类型
路径规划的类型选择:
─────────────────────────────────────────────────────
类型1:点对点路径(P2P)
├─ 描述:仅关心起点和终点
├─ 示教点:仅首末端(2个点)
├─ 轨迹:关节空间直线插值
├─ 特点:简单,但速度不均匀
└─ 适用:接近/撤离动作
类型2:过点路径(Through Points)✅ 推荐
├─ 描述:必须经过所有示教点
├─ 示教点:5–10个点
├─ 轨迹:三次样条插值
├─ 特点:平滑、可控
└─ 适用:清洁贴合轨迹
类型3:笛卡尔空间路径
├─ 描述:在笛卡尔空间规划特定形状
├─ 示教点:仅关键点,通过插值生成目标形状
├─ 轨迹:直线插值/圆弧插值
├─ 特点:笛卡尔轨迹精确
└─ 适用:需要精确笛卡尔轨迹的场景
清洁贴合任务的推荐:类型2(过点路径)
├─ 理由:
│ ├─ 清洁轨迹需要沿马桶表面移动
│ ├─ 示教点已经定义了合理的路径
│ ├─ 三次样条保证运动平滑
│ └─ 无需额外的笛卡尔空间规划
└─ 注意:确保示教点覆盖整个清洁面
五、速度规划设计
5.1 S型速度曲线原理
S型速度曲线原理:
─────────────────────────────────────────────────────
什么是S型速度曲线?
├─ 速度随时间呈S形变化
├─ 包含:加加速段、匀加速段、减加速段、匀速段、减减速段、匀减速段、加减速段
├─ 特点:加加速度有限,无冲击
└─ 广泛应用于机械臂速度规划
S型速度曲线的物理意义:
├─ 加加速段:加速度从0开始逐渐增大
├─ 匀加速段:加速度保持恒定
├─ 减加速段:加速度逐渐减小到0
├─ 匀速段:速度保持恒定
└─ 后续段:对称的减速过程
为什么需要S型速度?
├─ 避免速度突变(产生冲击)
├─ 避免加速度突变(产生振动)
├─ 保护机械结构,延长寿命
├─ 提高运动平稳性,清洁效果更好
└─ 减小电机电流冲击
5.2 S型速度规划参数
S型速度规划参数推荐值:
─────────────────────────────────────────────────────
旋转关节(J1/J2/J4/J5/J6):
├─ 最大速度 V_max:30–45 °/s
│ └─ 理由:清洁作业中等速度,兼顾效率和平稳
│
├─ 最大加速度 A_max:60–90 °/s²
│ └─ 理由:避免过大的惯性力,保护机械结构
│
└─ 最大加加速度 J_max:120–180 °/s³
└─ 理由:加加速度连续,无冲击感
直线关节(J3):
├─ 最大速度 V_max:50–80 mm/s
│ └─ 理由:Z轴升降速度适中
│
├─ 最大加速度 A_max:100–150 mm/s²
│ └─ 理由:避免垂直方向冲击
│
└─ 最大加加速度 J_max:200–300 mm/s³
└─ 理由:升降运动更平滑
参数调整方法:
─────────────────────────────────────────────────────
Step 1:从保守参数开始
├─ V_max = 30°/s(旋转)/ 50mm/s(直线)
├─ A_max = 60°/s²(旋转)/ 100mm/s²(直线)
└─ J_max = 120°/s³(旋转)/ 200mm/s³(直线)
Step 2:逐步提速
├─ 每次增加V_max 10%
├─ 观察末端运动平稳性
└─ 直到出现轻微抖动
Step 3:回退到安全值
├─ 抖动临界值 × 80%
├─ 留有20%余量应对负载变化
└─ 最终参数需实地验证
5.3 多关节速度同步
多关节速度同步原理:
─────────────────────────────────────────────────────
问题:6个关节的运动范围不同,如何统一速度规划?
解决:以"最慢关节"为基准,其他关节按比例缩放
示例:
├─ Joint 1:弧长30°,V_max=30°/s,理论时间=1s
├─ Joint 2:弧长60°,V_max=60°/s,理论时间=1s
├─ Joint 3:弧长100mm,V_max=50mm/s,理论时间=2s(最慢)
统一时间:T = 2s(以Joint 3为基准)
各关节缩放后的速度:
├─ Joint 1:V_new = 30°/2s = 15°/s(缩放到2s)
├─ Joint 2:V_new = 60°/2s = 30°/s(缩放到2s)
└─ Joint 3:V_new = 50mm/s(保持不变)
结果:
├─ 所有关节同时开始、同时结束
├─ 各关节根据自己的弧长分配速度
└─ 轨迹平滑、无冲击
六、轨迹质量要求
6.1 轨迹基本要求
轨迹基本要求:
─────────────────────────────────────────────────────
要求1:位置连续
├─ 轨迹必须经过所有示教点
├─ 示教点之间的曲线必须平滑
├─ 验收:检查相邻轨迹点的位置差,无突变
└─ 标准:位置差 < 0.1mm
要求2:速度连续
├─ 关节速度必须连续,无突变
├─ 验收:检查速度-时间曲线,无尖峰
└─ 标准:速度变化率 < A_max
要求3:加速度连续
├─ 关节加速度必须连续,无冲击
├─ 验收:检查加速度-时间曲线,无突变
└─ 标准:加速度变化率 < J_max
要求4:时间同步
├─ 各关节必须同时到达各路径点
├─ 验收:检查各关节的时间进度是否一致
└─ 标准:时间偏差 < 10ms
要求5:关节限位
├─ 所有轨迹点必须在关节限位范围内
├─ 验收:检查所有轨迹点的关节角度
└─ 标准:所有角度在 [θ_min, θ_max] 内
6.2 轨迹验收标准
轨迹验收标准检查表:
─────────────────────────────────────────────────────
1. 位置精度
├─ 各示教点的关节角度误差 < 0.1°
└─ 各示教点的末端位置误差 < 1mm
2. 速度性能
├─ 最大关节速度 < V_max
├─ 最大关节加速度 < A_max
└─ 最大关节加加速度 < J_max
3. 时间性能
├─ 轨迹总时间符合预期(可接受±10%偏差)
└─ 各关节时间同步误差 < 10ms
4. 运动平稳性
├─ 关节速度无突变
├─ 关节加速度无冲击
└─ 末端运动无抖动
5. 安全性
├─ 所有轨迹点在关节限位范围内
├─ 无奇异点姿态
└─ 接触力在安全范围内(<15N)
6.3 轨迹可视化验证
轨迹可视化验证流程:
─────────────────────────────────────────────────────
Step 1:关节角度曲线
├─ X轴:时间
├─ Y轴:各关节角度(6条曲线)
├─ 检查:曲线是否平滑经过示教点
└─ 异常:尖峰、突变 → 重新规划
Step 2:关节速度曲线
├─ X轴:时间
├─ Y轴:各关节速度(6条曲线)
├─ 检查:速度是否在限制范围内
└─ 异常:超速 → 降低V_max
Step 3:末端轨迹曲线
├─ X/Y/Z轴:笛卡尔位置
├─ 显示:3D轨迹曲线
├─ 检查:轨迹是否覆盖目标清洁面
└─ 异常:偏离目标区域 → 重新示教
Step 4:接触力曲线(回放时)
├─ X轴:时间
├─ Y轴:接触力
├─ 检查:接触力是否在3–10N范围内
└─ 异常:过大/过小 → 调整示教点或速度参数
七、实时控制与执行
7.1 固定频率控制原理
为什么需要固定频率?
├─ 机械臂控制系统需要确定性时序
├─ 避免因计算负载变化导致控制抖动
├─ 简化实时性设计
└─ 提高系统可靠性
控制频率选择:
├─ 推荐值:100Hz(每10ms一个控制周期)
├─ 理由:
│ ├─ CAN总线带宽充足(1Mbps)
│ ├─ 一体化关节响应快(<5ms)
│ ├─ 末端速度50mm/s时,每周期移动0.5mm
│ └─ 足够平滑,兼顾计算负载
└─ 范围:50–200Hz均可
固定频率控制的工作流程:
─────────────────────────────────────────────────────
每个控制周期(10ms):
├─ Step 1:读取当前时间t
├─ Step 2:查表获取目标角度
│ ├─ 在预生成的轨迹数组中查找
│ ├─ θ_target = trajectory[ index(t) ]
│ └─ index = floor(t × 100Hz)
│
├─ Step 3:发送目标角度到关节
│ ├─ 通过CAN总线发送
│ └─ 报文格式:[关节1角度, 关节2角度, ...]
│
├─ Step 4:关节内部执行
│ ├─ 关节控制器接收目标角度
│ ├─ 关节内部1000Hz位置环执行
│ └─ 电机驱动关节运动到目标角度
│
└─ Step 5:等待下一个周期
└─ sleep(10ms - 计算耗时)
7.2 轨迹预生成机制
轨迹预生成机制:
─────────────────────────────────────────────────────
为什么预生成轨迹?
├─ 实时计算轨迹会占用大量CPU
├─ 预生成后,运行时仅需查表
├─ 保证确定性执行时序
└─ 简化实时控制逻辑
预生成时机:
├─ 方案A:示教完成后立即生成 ✅ 推荐
│ ├─ 用户点击"保存示教"
│ ├─ 系统自动生成轨迹
│ ├─ 保存到轨迹文件
│ └─ 回放时直接加载
│
└─ 方案B:回放前生成
├─ 用户点击"开始回放"
├─ 系统从示教数据生成轨迹
├─ 保存到内存
└─ 回放时从内存读取
预生成的数据格式:
─────────────────────────────────────────────────────
trajectory = {
"轨迹点数": N,
"控制频率": 100, // Hz
"总时间": T, // 秒
"关节1角度序列": [θ₁₀, θ₁₁, ..., θ₁ₙ],
"关节2角度序列": [θ₂₀, θ₂₁, ..., θ₂ₙ],
...
"关节6角度序列": [θ₆₀, θ₆₁, ..., θ₆ₙ],
"时间戳序列": [t₀, t₁, ..., tₙ]
}
存储估算:
├─ 100Hz × 10秒轨迹 = 1000个点
├─ 每个点:6个float64 = 48字节
├─ 总存储:1000 × 48 ≈ 48KB
└─ 加上时间戳:约50KB,非常小
7.3 通信与监控
通信与监控设计:
─────────────────────────────────────────────────────
CAN总线通信:
├─ 波特率:1Mbps
├─ 控制频率:100Hz
├─ 报文周期:10ms
├─ 每周期发送:6个关节目标角度(6 × 4字节 = 24字节)
├─ 带宽占用:24 × 100 = 2.4KB/s(远低于1Mbps)
└─ 留有充足余量用于其他报文
关节跟踪监控:
├─ 实时读取各关节实际角度
├─ 与目标角度对比,计算跟踪误差
├─ 误差阈值:
│ ├─ > 2° → 降低整体速度50%
│ ├─ > 3° → 暂停运动,报警
│ └─ 误差恢复 → 自动恢复执行
└─ 目的:保护机械结构,防止超调
通信超时处理:
├─ 超时阈值:20ms(连续2个周期无响应)
├─ 处理:
│ ├─ 立即停止运动
│ ├─ 报警提示
│ └─ 等待故障恢复
└─ 目的:CAN总线故障保护
八、完整工作流程
8.1 从示教到执行的完整流程
从示教到执行的完整流程:
─────────────────────────────────────────────────────
阶段1:示教采集
├─ 1.1 操作者进入示教模式(零力矩控制)
├─ 1.2 拖动机械臂沿目标路径移动
├─ 1.3 在关键位置按下"记录点"
├─ 1.4 重复直到完成所有路径点
├─ 1.5 保存示教数据到文件
└─ 输出:示教数据文件(5–10个点)
阶段2:轨迹生成(离线)
├─ 2.1 加载示教数据
├─ 2.2 数据预处理(质量检查、格式转换)
├─ 2.3 三次样条插值(关节空间)
├─ 2.4 S型速度规划
├─ 2.5 重采样到固定频率(100Hz)
├─ 2.6 轨迹质量验证
├─ 2.7 保存轨迹文件
└─ 输出:轨迹数据文件(N×6数组)
阶段3:轨迹验证(离线)
├─ 3.1 轨迹可视化(关节角度、速度、末端轨迹)
├─ 3.2 关节限位检查
├─ 3.3 奇异点检查
├─ 3.4 空中预演(不接触)
└─ 输出:验证报告
阶段4:轨迹执行(在线)
├─ 4.1 加载轨迹文件到内存
├─ 4.2 移动机械臂到轨迹起点
├─ 4.3 启动控制循环(100Hz)
│ ├─ 查表获取当前时刻目标角度
│ ├─ 发送目标角度到关节
│ └─ 监控关节跟踪误差
├─ 4.4 轨迹执行完成
└─ 输出:清洁动作完成
阶段5:效果评估
├─ 5.1 记录接触力曲线
├─ 5.2 分析清洁覆盖率
├─ 5.3 与示教数据对比
└─ 输出:执行报告
8.2 关键文件格式
关键文件格式:
─────────────────────────────────────────────────────
示教数据文件(.json):
├─ teach_id: 示教编号
├─ task_type: 任务类型(inner_wall/outer_wall/seat)
├─ points: 路径点列表
│ ├─ joints: 关节角度 [θ₁, θ₂, d₃, θ₄, θ₅, θ₆]
│ ├─ force: 接触力
│ ├─ type: 点类型(approach/contact/path/retreat)
│ └─ end_pos: 末端笛卡尔位置
└─ quality_check: 质量检查结果
轨迹数据文件(.npz 或 .bin):
├─ trajectory_joints: shape=(N, 6), dtype=float64
├─ trajectory_time: shape=(N,), dtype=float64
└─ metadata: 包含控制频率、总时间等
配置文件(.yaml):
├─ 速度规划参数:V_max, A_max, J_max
├─ 控制参数:控制频率、误差阈值
├─ 关节限位:θ_min, θ_max
└─ 安全参数:最大接触力、碰撞阈值
核心结论
结论1:示教数据通过三次样条插值生成平滑轨迹 示教点作为插值节点,三次样条保证位置、速度、加速度连续,适合清洁贴合任务。
结论2:S型速度规划保证运动柔顺 通过限制最大速度、加速度和加加速度,实现无冲击的平滑运动,保护机械结构。
结论3:轨迹预生成简化实时控制 示教完成后预生成轨迹,运行时仅需查表发送,避免实时计算负担,保证确定性时序。
结论4:固定频率控制(100Hz)是标准实践 100Hz控制频率兼顾了轨迹平滑性(每周期0.5mm位移)和计算负载。
结论5:完整的验证流程确保轨迹质量 示教质量检查 → 轨迹可视化 → 空中预演 → 接触验证,层层把关确保回放质量。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-04-18,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号