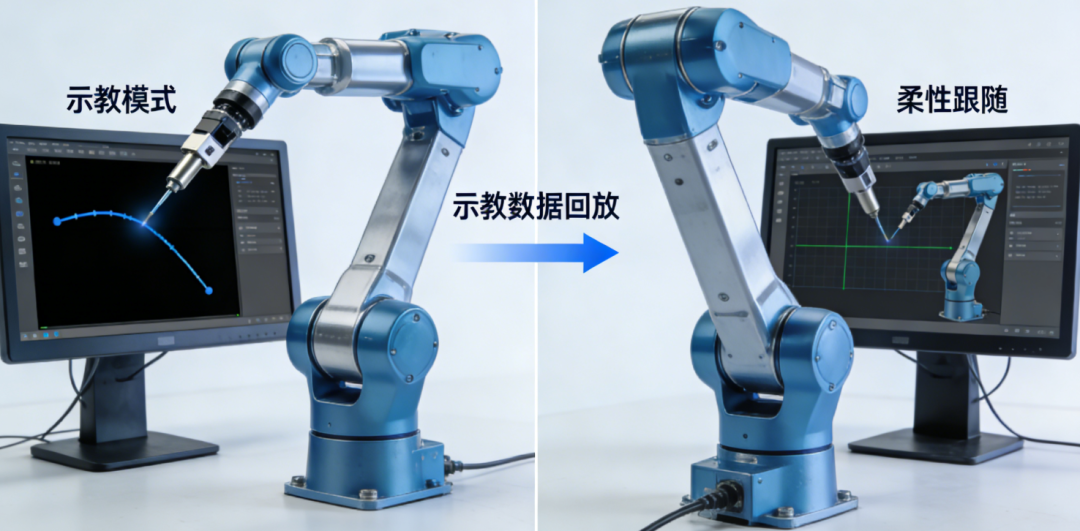
示教回放 + 柔性跟随的机械臂控制方案


一、问题本质分析
1.1 示教回放的工作原理与天然缺陷
示教回放的工作原理:
─────────────────────────────────────────────────────
示教阶段(人工操作):
├─ 操作者手动引导机械臂末端到达目标位置
├─ 系统记录每个时刻的关节角度序列
│ └─ 记录内容:[θ₁(t), θ₂(t), d₃(t), θ₄(t), θ₅(t), θ₆(t)]
├─ 示教时末端实际到达了正确位置(人工保证)
└─ 记录的是"关节角度",不是"末端位置"
回放阶段(自动执行):
├─ 系统按照记录的关节角度序列驱动各关节
├─ 期望:末端重现示教时的轨迹
└─ 实际:末端位置 = 正运动学(关节角度 + 运动学模型)
天然缺陷:
├─ 回放时的末端位置 = FK(θ_recorded, model_actual)
├─ 示教时的末端位置 = FK(θ_recorded, model_teach)
│
├─ 如果 model_actual ≠ model_teach(运动学有误差)
│ └─ 回放末端位置 ≠ 示教末端位置
│
└─ 如果基座位置/方向发生偏移
└─ 所有轨迹点整体偏移,偏差更大
1.2 双重误差的叠加效应
双重误差叠加分析:
─────────────────────────────────────────────────────
误差源1:运动学模型误差
├─ 来源:连杆长度加工误差、关节零位偏差、减速器背隙
├─ 典型量级:
│ ├─ 连杆长度误差:±0.5–1mm/连杆
│ ├─ 关节零位偏差:±0.1–0.5°/关节
│ └─ 谐波减速器背隙:< 1 arcmin(极小,可忽略)
├─ 末端位置误差(6关节累积):
│ └─ 约 ±3–8mm(典型值,未标定状态)
└─ 误差特征:固定偏差(每次回放误差相同)
误差源2:基座位置/方向偏移
├─ 来源:
│ ├─ 机器人底盘停靠位置不精确(每次进入马桶间位置不同)
│ ├─ 地面不平导致底盘倾斜
│ └─ 底盘轮子打滑导致位置偏差
├─ 典型量级:
│ ├─ 平移偏移:±10–20mm(底盘定位精度)
│ ├─ 旋转偏移:±1–3°(底盘朝向误差)
│ └─ 高度偏移:±2–5mm(地面不平)
└─ 误差特征:每次进入马桶间都不同(随机偏差)
双重误差叠加后的末端偏差:
─────────────────────────────────────────────────────
最坏情况(误差方向相同):
├─ 运动学误差:8mm
├─ 基座平移偏移:20mm
├─ 基座旋转偏移(1°,臂长500mm):500 × sin(1°) ≈ 9mm
└─ 总偏差:8 + 20 + 9 = 37mm
典型情况(误差随机方向):
├─ 合成偏差:√(8² + 20² + 9²) ≈ 23mm
└─ 结论:末端偏差约 20–37mm
对比被动柔顺行程(±10mm):
└─ 偏差远超被动柔顺能力 → 必须有主动补偿机制
二、误差来源与量化
2.1 各误差源的详细分析
误差源详细分析(针对Scara机械臂构型):
─────────────────────────────────────────────────────
J1底座旋转(谐波减速器):
├─ 零位偏差:±0.1°(谐波减速器精度高)
├─ 末端影响:0.1° × 500mm臂长 = 0.87mm
└─ 影响方向:切向(绕Z轴)
J2肩旋转(谐波减速器):
├─ 零位偏差:±0.1°
├─ 末端影响:0.1° × 400mm(J2到末端距离)= 0.70mm
└─ 影响方向:切向
J3 Z轴升降(滚珠丝杠):
├─ 零位偏差:±0.5mm(丝杠行程起点误差)
├─ 末端影响:直接 ±0.5mm
└─ 影响方向:Z轴(高度)
J4手腕旋转(行星减速器):
├─ 零位偏差:±0.5°(行星减速器精度较低)
├─ 末端影响:0.5° × 210mm(J4到末端距离)= 1.83mm
└─ 影响方向:切向
J5俯仰(行星减速器):
├─ 零位偏差:±0.5°
├─ 末端影响:0.5° × 60mm(J5到末端距离)= 0.52mm
└─ 影响方向:法向(垂直于清洁面)
J6俯仰(行星减速器):
├─ 零位偏差:±0.5°
├─ 末端影响:0.5° × 30mm(J6到末端距离)= 0.26mm
└─ 影响方向:法向
连杆长度加工误差:
├─ L1(280mm):±0.5mm → 末端影响 ±0.5mm
├─ L2(250mm):±0.5mm → 末端影响 ±0.5mm
├─ L5(150mm):±0.3mm → 末端影响 ±0.3mm
└─ L6(60mm):±0.2mm → 末端影响 ±0.2mm
运动学误差合计(RSS合成):
├─ 切向:√(0.87² + 0.70² + 1.83² + 0.5² + 0.5²) ≈ 2.3mm
├─ 法向:√(0.52² + 0.26² + 0.3² + 0.2²) ≈ 0.7mm
├─ Z轴:0.5mm
└─ 总体:约 2–4mm(未标定状态,比之前估计乐观)
注:行星减速器零位偏差是主要误差源(J4影响最大)
2.2 误差对不同清洁任务的影响
误差对各清洁任务的影响分析:
─────────────────────────────────────────────────────
内壁清洁(最敏感):
├─ 法向误差(径向):2–4mm
├─ 马桶内壁到末端的设计距离:0mm(贴壁)
├─ 影响:
│ ├─ 误差向内(+2–4mm)→ 末端"顶进"内壁 → 接触力过大
│ └─ 误差向外(-2–4mm)→ 末端"悬空" → 无接触
└─ 结论:法向误差直接影响接触质量,必须补偿
外壁清洁(中等敏感):
├─ 法向误差:2–4mm
├─ 影响:同内壁,但外壁曲率较小,容错性稍好
└─ 结论:需要补偿,但不如内壁紧迫
座垫清洁(较不敏感):
├─ Z轴误差:0.5mm(运动学)+ 基座高度偏移
├─ 影响:接触力变化,但被动柔顺可吸收
└─ 结论:被动柔顺基本可以处理
基座偏移的影响(所有任务):
├─ 平移偏移10–20mm → 所有轨迹点整体偏移
├─ 旋转偏移1–3° → 轨迹点绕基座旋转
└─ 结论:基座偏移是最大的误差源,必须优先处理
三、系统方案总体设计
3.1 四层防御体系
四层防御体系(从粗到细):
─────────────────────────────────────────────────────
Layer 4:示教阶段优化(预防)
├─ 目标:在示教时记录更多信息,为回放提供参考
├─ 方法:同步记录关节角度 + 力传感器信号 + 接触状态
├─ 效果:回放时有"参考力信号",可以做力信号对齐
└─ 解决:运动学误差的部分补偿
Layer 3:回放前基座偏移补偿(粗补偿)
├─ 目标:在回放开始前,估计并补偿基座偏移
├─ 方法:快速接触标定(2–3个接触点,约10秒)
├─ 效果:将基座偏移从 ±20mm 降低到 ±3mm
└─ 解决:基座平移和旋转偏移
Layer 2:回放中力引导自适应(细补偿)
├─ 目标:在回放过程中,实时用力信号修正末端位置
├─ 方法:比较实际力与示教力,调整法向位置
├─ 效果:将剩余误差(运动学误差+残余基座偏移)从 ±5mm 降低到 ±1mm
└─ 解决:运动学误差 + 残余基座偏移
Layer 1:被动柔顺兜底(最终保障)
├─ 目标:吸收所有层次未能补偿的残余误差
├─ 方法:弹簧+球铰+海绵(机械结构)
├─ 效果:吸收 ±10mm 法向误差,±10° 角度误差
└─ 解决:所有层次的残余误差
─────────────────────────────────────────────────────
各层误差处理能力:
误差源 Layer3补偿后 Layer2补偿后 Layer1兜底后
基座平移偏移 20mm → 3mm 3mm → 1mm 1mm → 0.5mm
基座旋转偏移 9mm → 2mm 2mm → 0.5mm 0.5mm → 0.2mm
运动学误差 不处理 4mm → 1mm 1mm → 0.5mm
─────────────────────────────────────────────────────
最终末端偏差:约 ±0.5mm(满足清洁需求)
3.2 系统架构图
系统架构(数据流):
─────────────────────────────────────────────────────
示教阶段:
[人工引导末端] → [记录关节角度θ(t)] + [记录力信号F(t)] + [记录接触状态C(t)]
↓
[示教数据库]
├─ 关节角度序列
├─ 力信号序列(参考力)
└─ 接触状态序列
回放阶段:
[进入马桶间] → [Layer3:快速接触标定] → [计算基座偏移 ΔT]
↓
[读取示教数据] → [轨迹变换(应用ΔT)] → [变换后的关节角度序列]
↓
[Layer2:力引导自适应控制]
├─ 执行关节角度指令
├─ 读取实际力信号 F_actual
├─ 对比参考力 F_reference
├─ 计算法向修正量 Δx_normal
└─ 修正末端位置
↓
[Layer1:被动柔顺兜底]
└─ 弹簧+球铰+海绵吸收残余误差
↓
[末端接触马桶表面]
└─ 接触力 5–10N,稳定清洁
四、模块一:示教阶段的正确做法
4.1 示教数据的记录内容
示教阶段需要记录的完整数据:
─────────────────────────────────────────────────────
必须记录(最小集):
├─ 关节角度序列:[θ₁, θ₂, d₃, θ₄, θ₅, θ₆](t)
│ └─ 采样频率:100Hz(每10ms一帧)
│
├─ 力传感器信号:F_contact(t)
│ └─ 采样频率:100Hz(与关节角度同步)
│ └─ 重要:记录的是重力补偿后的接触力
│
└─ 接触状态:C(t) ∈ {未接触, 接触中, 过载}
└─ 用于回放时判断何时开启力引导
推荐记录(增强集):
├─ 末端笛卡尔位置:[x, y, z, roll, pitch, yaw](t)
│ └─ 通过正运动学计算得到
│ └─ 用于回放时的轨迹变换(比关节角度更直观)
│
├─ 参考马桶位置:马桶轴心坐标 (x_c, y_c),座圈高度 H_seat
│ └─ 示教时手动测量或接触标定
│ └─ 用于回放时计算基座偏移
│
└─ 清洁任务标签:每段轨迹对应的清洁任务(内壁/外壁/座垫/底座)
└─ 用于回放时选择对应的力控参数
4.2 示教时的关键操作规范
示教操作规范(直接影响回放质量):
─────────────────────────────────────────────────────
规范1:示教时必须保证末端真实接触马桶表面
├─ 不能"悬空示教"(末端离表面5mm)
├─ 必须让擦拭头真实贴合马桶表面
├─ 力传感器读数应在 5–10N 范围内
└─ 原因:回放时用力信号对齐,示教力是参考基准
规范2:示教速度要与回放速度一致
├─ 示教时的运动速度 = 回放时的运动速度(约50mm/s)
├─ 速度不一致会导致力信号时序错位
└─ 建议:示教时用固定速度模式(不要忽快忽慢)
规范3:示教前必须执行接触标定
├─ 示教前,记录马桶轴心位置 (x_c, y_c) 和座圈高度 H_seat
├─ 这些数据是回放时计算基座偏移的参考
└─ 标定方法:3点接触法(见模块二)
规范4:每种清洁任务单独示教
├─ 内壁清洁:单独示教一段完整轨迹
├─ 外壁清洁(有扶手侧):单独示教
├─ 外壁清洁(无扶手侧):单独示教
├─ 座垫清洁:单独示教
└─ 底座清洁:单独示教
原因:不同任务的力控参数不同,分开管理更清晰
规范5:示教数据要多次验证
├─ 示教完成后,立即回放一次验证
├─ 确认回放轨迹与示教轨迹一致(在同一台马桶上)
└─ 验证通过后才保存为正式示教数据
4.3 示教数据的存储格式
示教数据存储格式(JSON):{
"teach_id": "toilet_inner_wall_v1",
"task_type": "inner_wall",
"teach_time": "2026-04-07T10:00:00",
"reference_toilet": {
"center_x": 0.0, // 示教时马桶轴心X(mm,基座坐标系)
"center_y": 500.0, // 示教时马桶轴心Y(mm)
"seat_height": 400.0 // 示教时座圈高度(mm)
},
"frames": [
{
"t": 0.000, // 时间戳(秒)
"joints": [θ₁, θ₂, d₃, θ₄, θ₅, θ₆], // 关节角度(度/mm)
"end_pos": [x, y, z, roll, pitch, yaw], // 末端笛卡尔位置
"force": 7.2, // 接触力(N,重力补偿后)
"contact": true // 接触状态
},
{
"t": 0.010,
...
}
],
"total_frames": 3000, // 总帧数(30秒 × 100Hz)
"force_profile": {
"mean": 7.5, // 平均接触力
"std": 1.2, // 接触力标准差
"min": 5.0,
"max": 10.0
}
}
存储大小估算:
├─ 每帧:约 100 字节
├─ 30秒轨迹:3000帧 × 100字节 = 300KB
└─ 5种清洁任务:约 1.5MB(极小,无存储压力)
五、模块二:回放前的基座偏移补偿
5.1 基座偏移的数学描述
基座偏移的数学描述:
─────────────────────────────────────────────────────
示教时的基座坐标系:{B_teach}
回放时的基座坐标系:{B_replay}
两者之间的变换关系(刚体变换):
├─ 平移:[Δx, Δy, Δz](基座位置偏移)
├─ 旋转:Δψ(基座绕Z轴的朝向偏移)
└─ 变换矩阵 T:
│ cos(Δψ) -sin(Δψ) 0 Δx │
T = │ sin(Δψ) cos(Δψ) 0 Δy │
│ 0 0 1 Δz │
│ 0 0 0 1 │
示教轨迹点(基座坐标系):P_teach = [x, y, z, 1]ᵀ
回放时对应的目标点:P_replay = T × P_teach
关键:只要估计出 T(即 Δx, Δy, Δz, Δψ),
就可以将所有示教轨迹点变换到当前基座坐标系
5.2 快速接触标定估计基座偏移
快速接触标定方案(2点法 vs 3点法):
─────────────────────────────────────────────────────
方案A:3点接触法(推荐,可估计平移+旋转)
─────────────────────────────────────────────────────
原理:
├─ 在马桶外壁3个已知角度位置(0°/120°/240°)接触
├─ 记录3个接触点的末端坐标(基座坐标系)
├─ 拟合圆心,得到当前马桶轴心位置
├─ 对比示教时的马桶轴心位置
└─ 计算基座偏移 [Δx, Δy, Δψ]
步骤:
Step 1:机械臂移动到0°方向,缓慢向马桶外壁靠近
├─ 速度:5mm/s
├─ 检测到接触(F > 1N)时停止
└─ 记录接触点 P1 = (x1, y1)
Step 2:机械臂移动到120°方向,重复接触
└─ 记录接触点 P2 = (x2, y2)
Step 3:机械臂移动到240°方向,重复接触
└─ 记录接触点 P3 = (x3, y3)
Step 4:三点拟合圆心(解析公式)
└─ 联立方程组求解圆心 (cx_replay, cy_replay)
Step 5:计算基座偏移
├─ Δx = cx_replay - cx_teach
├─ Δy = cy_replay - cy_teach
└─ Δψ = atan2(Δy, Δx)(近似,小角度时有效)
Step 6:高度标定
├─ 机械臂从上方缓慢下降,接触座圈
├─ 记录接触高度 H_replay
└─ Δz = H_replay - H_teach
标定时间:约 10–15秒
标定精度:
├─ 平移:±2mm(接触式标定精度)
└─ 旋转:±0.5°(三点法精度)
─────────────────────────────────────────────────────
方案B:2点法(更快,但只能估计平移)
─────────────────────────────────────────────────────
原理:
├─ 在马桶外壁2个位置(0°/180°)接触
├─ 两点中点即为马桶轴心(近似)
└─ 只能估计平移偏移,无法估计旋转偏移
适用场景:
├─ 底盘定位精度较高(旋转偏移 < 0.5°)
└─ 对清洁精度要求不高的场景
5.3 轨迹变换的实现
轨迹变换实现(伪代码):def transform_trajectory(teach_frames, delta_x, delta_y, delta_z, delta_psi):
transformed_frames = []
cos_psi = cos(delta_psi)
sin_psi = sin(delta_psi)
for frame in teach_frames:
x, y, z = frame.end_pos[0:3]
// 旋转变换(绕Z轴)
x_new = cos_psi * x - sin_psi * y + delta_x
y_new = sin_psi * x + cos_psi * y + delta_y
z_new = z + delta_z
// 更新末端位置
frame_new = frame.copy()
frame_new.end_pos[0:3] = [x_new, y_new, z_new]
// 重新计算关节角度(逆运动学)
frame_new.joints = inverse_kinematics(x_new, y_new, z_new,
frame.end_pos[3:6])
transformed_frames.append(frame_new)
return transformed_frames
// 注意:逆运动学可能有多解,需要选择与示教关节角度最接近的解
// 选解策略:选择与 frame.joints 欧氏距离最小的解
六、模块三:回放中的力引导自适应
6.1 力引导自适应的核心思想
力引导自适应的核心思想:
─────────────────────────────────────────────────────
示教时记录了"参考力信号" F_reference(t)
回放时实时读取"实际力信号" F_actual(t)
两者的差值反映了末端位置的法向偏差:
├─ F_actual > F_reference → 末端比示教时更深入表面
│ └─ 说明末端偏向表面内侧(法向误差为正)
│ └─ 需要末端向外退让(减小接触力)
│
├─ F_actual < F_reference → 末端比示教时更远离表面
│ └─ 说明末端偏向表面外侧(法向误差为负)
│ └─ 需要末端向内靠近(增大接触力)
│
└─ F_actual ≈ F_reference → 末端位置与示教时一致
└─ 不需要修正
这个思路的优势:
├─ 不需要知道运动学误差的具体数值
├─ 不需要知道基座偏移的精确量(Layer3已处理大部分)
├─ 只需要力信号的差值,算法极简单
└─ 自动适应任何形式的法向误差(运动学+残余基座偏移)6.2 法向偏移量转换为关节修正量
法向偏移量转换为关节修正量:
─────────────────────────────────────────────────────
问题:力引导计算出的是"法向偏移量 x_normal_offset(mm)"
但关节控制器需要的是"关节角度修正量 Δθ"
方法:基于当前任务类型的简化转换
─────────────────────────────────────────────────────
内壁/外壁清洁(法向 = 水平径向方向):
├─ 法向偏移 Δr(径向)
├─ 当前末端角度 θ_arm = θ₁ + θ₂
├─ 笛卡尔修正:
│ ├─ Δx = Δr × cos(θ_arm)(内壁:负号;外壁:正号)
│ └─ Δy = Δr × sin(θ_arm)
├─ 转换为关节修正(SCARA逆运动学微分):
│ ├─ 当前末端半径 r = √(x² + y²)
│ ├─ Δr → 调整J1+J2使末端半径变化Δr
│ └─ 具体:保持θ_arm不变,调整r(J1+J2联动)
座垫/底座清洁(法向 = 垂直Z轴方向):
├─ 法向偏移 Δz(Z轴)
├─ 直接转换为J3升降修正:Δd₃ = Δz
注意:这种简化转换忽略了J5/J6俯仰对法向方向的影响
├─ 当J5/J6俯仰角较大时(>30°),法向方向偏离水平
├─ 简化误差:约 sin(30°) × Δr = 0.5 × Δr
└─ 对于清洁任务(Δr < 5mm),误差 < 2.5mm(可接受)
如需更精确:使用雅可比矩阵转换(进阶方案)
6.3 力信号时间对齐问题
力信号时间对齐(关键技术点):
─────────────────────────────────────────────────────
问题:回放时的运动速度可能与示教时不完全一致
导致力信号在时间轴上错位
例子:
├─ 示教时:在 t=5.0s 时末端到达内壁某点,力=7.5N
├─ 回放时:由于基座偏移补偿,运动路径稍有不同
│ └─ 在 t=5.1s 时才到达同一点
└─ 如果直接用 t=5.0s 的参考力(7.5N)对比 t=5.1s 的实际力
→ 时间错位导致力引导失准
解决方案:基于位置的力信号对齐(而非时间对齐)
─────────────────────────────────────────────────────
方法:
├─ 不用时间索引查找参考力
├─ 用当前末端位置(x,y,z)在示教轨迹中查找最近点
├─ 用最近点的参考力作为当前时刻的参考力
└─ 这样即使速度不同,力信号也能正确对齐
实现(伪代码):
def find_reference_force(current_pos, teach_frames):
// 在示教轨迹中找到与当前位置最近的帧
min_dist = infinity
best_frame = None
for frame in teach_frames:
dist = distance(current_pos, frame.end_pos[0:3])
if dist < min_dist:
min_dist = dist
best_frame = frame
return best_frame.force
// 注意:为了效率,可以只在当前帧附近搜索(±50帧)
// 而不是搜索全部3000帧
七、模块四:被动柔顺作为最终兜底
7.1 被动柔顺在示教回放场景中的作用
被动柔顺在示教回放场景中的特殊作用:
─────────────────────────────────────────────────────
场景1:Layer3标定误差(残余基座偏移 ±2–3mm)
├─ 标定精度 ±2mm → 轨迹变换后仍有 ±2mm 法向误差
├─ 被动柔顺行程 ±5mm(弹簧)
└─ 完全可以吸收
场景2:运动学误差(约 ±2–4mm)
├─ Layer2力引导补偿后残余约 ±1mm
├─ 被动柔顺行程 ±5mm
└─ 完全可以吸收
场景3:马桶表面局部突起(排水孔边缘等)
├─ 突起高度约 1–3mm
├─ 被动柔顺(海绵+弹簧)可吸收 ±5mm
└─ 完全可以吸收
场景4:Layer3/Layer2均失效(极端情况)
├─ 总误差可能达到 ±20mm
├─ 被动柔顺行程 ±10mm(弹簧5mm + 海绵5mm)
├─ 超出被动柔顺行程的部分(±10mm)
└─ 触发过载保护(F > 20N → 立即退让)
结论:被动柔顺是最后一道防线,
在Layer3+Layer2正常工作时,
被动柔顺只需处理 ±1–2mm 的残余误差,
工作在轻松状态,寿命更长。
7.2 被动柔顺参数在示教回放场景下的优化
被动柔顺参数优化(针对示教回放场景):
─────────────────────────────────────────────────────
原参数(通用清洁场景):
├─ 弹簧刚度:k = 5N/mm
├─ 预压量:1–2mm(初始接触力 5–10N)
└─ 最大压缩量:5mm
示教回放场景的特殊需求:
├─ Layer3+Layer2已处理大部分误差
├─ 被动柔顺只需处理 ±1–2mm 的残余误差
├─ 可以适当增大弹簧刚度(提高末端刚度,改善清洁效果)
优化参数:
├─ 弹簧刚度:k = 8N/mm(从5提高到8)
│ └─ 理由:残余误差小,不需要大行程柔顺
│ └─ 效果:接触力更稳定(刚度高,力对位置不敏感)
├─ 预压量:1.5mm(初始接触力 12N)
│ └─ 理由:示教时接触力约7.5N,预压稍大保证初始接触
└─ 最大压缩量:3mm(从5mm减小到3mm)
└─ 理由:残余误差小,不需要大行程
注意:如果Layer3/Layer2效果不好,恢复原参数(k=5N/mm)
八、各模块协同工作机制
8.1 完整回放流程
完整回放流程(时序图):
─────────────────────────────────────────────────────
T=0s 机器人进入马桶间,底盘停靠
│
T=0–15s [Layer3] 快速接触标定
├─ 3点接触马桶外壁(每点约3秒)
├─ 1次高度标定(约2秒)
└─ 计算基座偏移 [Δx, Δy, Δz, Δψ]
│
T=15–16s [轨迹变换] 将示教轨迹变换到当前坐标系
├─ 读取示教数据(关节角度+力信号)
├─ 应用变换矩阵T(约0.3秒计算)
└─ 生成变换后的轨迹
│
T=16s 开始回放
│
T=16–46s [Layer2] 力引导自适应回放(内壁清洁,约30秒)
├─ 执行变换后的关节角度序列
├─ 实时读取力传感器
├─ 基于位置对齐查找参考力
├─ 计算力误差,修正法向位置
└─ 被动柔顺(Layer1)持续兜底
│
T=46–50s 更换清洁模组(磁吸快换,约4秒)
│
T=50–80s [Layer2] 力引导自适应回放(外壁清洁,约30秒)
│
T=80–84s 更换清洁模组
│
T=84–104s [Layer2] 力引导自适应回放(座垫清洁,约20秒)
│
T=104s 清洁完成,机器人退出马桶间
总时间:约 104秒(含标定15秒 + 清洁89秒)
8.2 各模块的误差处理分工
各模块误差处理分工(量化):
─────────────────────────────────────────────────────
初始误差(进入马桶间后):
├─ 基座平移偏移:±20mm
├─ 基座旋转偏移:±3°(末端影响约±26mm)
└─ 运动学误差:±4mm
经过Layer3(接触标定)后:
├─ 基座平移偏移:±20mm → ±2mm(减少90%)
├─ 基座旋转偏移:±3° → ±0.5°(末端影响±4mm → ±0.7mm)
└─ 运动学误差:±4mm(不处理)
总残余误差:约 ±5mm
经过Layer2(力引导自适应)后:
├─ 法向误差:±5mm → ±1mm(减少80%)
└─ 切向误差:不处理(切向误差不影响接触质量)
总残余法向误差:约 ±1mm
经过Layer1(被动柔顺)后:
├─ 法向误差:±1mm → ±0.3mm(弹簧吸收)
└─ 角度误差:±5° → ±1°(球铰吸收)
最终末端接触误差:约 ±0.3mm
接触力稳定性:
├─ 目标接触力:7.5N
├─ 实际接触力范围:7.5 ± 1.5N(±20%)
└─ 清洁效果:优秀(接触力在5–10N范围内)
九、关键注意事项
9.1 示教阶段的陷阱
示教阶段的常见陷阱:
─────────────────────────────────────────────────────
陷阱1:示教时末端悬空(最常见错误)
├─ 现象:操作者认为末端"差不多到位了",实际离表面3–5mm
├─ 后果:示教力信号为0,回放时力引导无参考
├─ 预防:示教时强制要求力传感器读数 > 3N 才允许记录
└─ 检查:回放验证时,观察力信号是否与示教时一致
陷阱2:示教时用力过大(过度压入)
├─ 现象:操作者用力推末端,接触力达到15–20N
├─ 后果:回放时力引导目标力过高,可能损坏马桶
├─ 预防:示教时限制接触力 < 12N(软件限制)
└─ 检查:示教数据中 force_profile.max < 12N
陷阱3:示教速度不均匀
├─ 现象:操作者时快时慢,力信号时序不规律
├─ 后果:基于位置的力信号对齐效果变差
├─ 预防:使用速度辅助模式(系统限制最大速度)
└─ 检查:示教数据中相邻帧的位移量应均匀
陷阱4:示教时马桶位置与回放时不同
├─ 现象:示教在A号马桶,回放在B号马桶(尺寸略有不同)
├─ 后果:轨迹变换后仍有系统性误差
├─ 预防:示教时记录马桶型号,回放时匹配对应示教数据
└─ 建议:对每种马桶型号单独示教
9.2 回放阶段的关键注意事项
回放阶段的关键注意事项:
─────────────────────────────────────────────────────
注意1:接触标定失败的处理
├─ 可能原因:马桶位置偏移过大(>30mm),接触点找不到
├─ 检测方法:3次接触尝试均失败(F < 1N)
├─ 处理方案:
│ ├─ 扩大搜索范围(从±20mm扩大到±40mm)
│ └─ 如果仍失败,报警并停止(不强行执行)
└─ 安全原则:标定失败宁可停止,不能盲目执行
注意2:力引导修正量的累积限制
├─ 问题:力引导的累积偏移量 x_normal_offset 可能无限增大
├─ 场景:马桶表面有大面积凹陷,力持续偏小
│ └─ 力引导持续向内靠近,累积偏移量越来越大
├─ 限制:x_normal_offset 限幅在 ±10mm(被动柔顺行程内)
└─ 超出限幅时:停止力引导,保持当前偏移量
注意3:切换清洁任务时重置偏移量
├─ 每次切换清洁任务(内壁→外壁→座垫)时
├─ 重置 x_normal_offset = 0
└─ 原因:不同任务的法向方向不同,偏移量不能跨任务累积
注意4:回放速度与示教速度的匹配
├─ 回放速度应与示教速度一致(±10%以内)
├─ 速度差异过大会导致力信号时序错位
│ └─ 即使用位置对齐,速度差异也会影响动态力
└─ 建议:回放时使用与示教相同的速度参数
注意5:多次回放的一致性验证
├─ 首次回放后,检查清洁覆盖率和接触力记录
├─ 如果接触力波动过大(>±3N),重新调整Kp
└─ 连续5次回放,接触力稳定性应一致
十、实施路线图与验收标准
10.1 分阶段实施计划
阶段 | 内容 | 周期 | 核心任务 | 验收标准 |
|---|---|---|---|---|
P1 | 示教数据采集系统 | 第1–2周 | 实现关节角度+力信号同步记录 | 示教数据完整,力信号与位置同步误差<5ms |
P2 | 接触标定模块 | 第3周 | 3点接触法,计算基座偏移 | 标定精度±2mm,时间<15秒 |
P3 | 轨迹变换模块 | 第4周 | 应用变换矩阵,重新计算关节角度 | 变换后轨迹误差<3mm |
P4 | 力引导自适应 | 第5–6周 | 基于位置的力信号对齐+P控制 | 接触力跟踪误差<±2N |
P5 | 联调与验证 | 第7–8周 | 完整流程联调,多次回放验证 | 连续5次回放,接触力稳定±2N |
10.2 验收测试方案
验收测试方案:
─────────────────────────────────────────────────────
测试1:基座偏移补偿效果验证
├─ 方法:将机器人底盘故意偏移 ±15mm 和 ±2°
├─ 执行接触标定,观察标定结果
├─ 验收标准:标定后轨迹误差 < ±3mm
└─ 重复5次,每次偏移量随机
测试2:力引导自适应效果验证
├─ 方法:在马桶表面贴3mm厚的垫片(模拟位置误差)
├─ 执行回放,观察力传感器读数
├─ 验收标准:接触力在 5–12N 范围内(不超过15N)
└─ 重复5次
测试3:双重误差叠加验证
├─ 方法:同时施加基座偏移(±15mm)+ 垫片(3mm)
├─ 执行完整回放流程(标定+变换+力引导)
├─ 验收标准:接触力在 5–12N 范围内
└─ 重复3次
测试4:连续可靠性验证
├─ 方法:连续执行20次完整清洁回放
├─ 每次随机改变底盘停靠位置(±10mm范围内)
├─ 验收标准:
│ ├─ 20次中无过载事件(F > 20N)
│ ├─ 接触力平均值:7.5 ± 2N
│ └─ 清洁覆盖率:≥ 90%
└─ 这是最终验收测试
核心结论
结论1:示教回放在双重误差下末端偏差可达20–37mm,远超被动柔顺行程 运动学误差(±4mm)+ 基座偏移(±20mm)叠加后,末端偏差远超被动柔顺的±10mm行程。必须有主动补偿机制,不能只靠被动柔顺兜底。
结论2:四层防御体系是最优解 Layer3(接触标定)处理基座偏移(±20mm→±2mm),Layer2(力引导自适应)处理运动学误差和残余偏移(±5mm→±1mm),Layer1(被动柔顺)兜底(±1mm→±0.3mm)。每层算法都很简单,组合后效果优秀。
结论3:示教时必须同步记录力信号,这是力引导自适应的基础 示教时记录的参考力信号是回放时力引导的"目标值"。没有参考力信号,力引导只能用固定目标力(7.5N),无法适应不同位置的接触力变化。
结论4:基于位置的力信号对齐优于基于时间的对齐 回放速度与示教速度不完全一致时,时间对齐会导致力信号错位。基于当前末端位置在示教轨迹中查找最近点,可以正确对齐力信号,对速度差异不敏感。
结论5:接触标定是整个系统的关键前提,失败时必须停止 标定失败意味着基座偏移未知,后续所有补偿都失去基准。宁可停止清洁,也不能在未知偏移下盲目执行示教轨迹。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-04-15,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号