马虾Agent的驾驭实践(三)-- 不可能三角

马虾Agent的驾驭实践(三)-- 不可能三角

企业架构师思维
发布于 2026-05-08 10:37:41
发布于 2026-05-08 10:37:41
2026年苏超开幕式上,徐州的一首“百鸟朝凤”,让无数淮海人唤醒了开席密语“俺奶,给俺叨马虾”,马虾究竟是何方神物,先上图:

如此神物,当如何驾驭,今天就来念叨念叨,希望对大家能够领略马虾驾驭之乐。在AI领域,此处我用“马虾”代指基于HermesAgent(爱马仕)和OpenClaw(龙虾)之类的 Agent框架构建的马虾Agent。】

2026年4月26日,在腾讯云长沙同盟和上海同盟联合举办的一场沙龙上,我分享了个人总结的一套训练马虾Agent的方法和驾驭经验,以及理论思考,以下是基于分享内容的整理,希望对大家有所启发。
第一篇讲了马虾Agent的驾驭方法,第二篇讲讲马虾驯化的一些踩坑经历以及一些实践中总结的经验,这些经验可以让Agent的训练过程快速收敛。作为第三篇来讲讲智能体Agent框架的不可能三角。

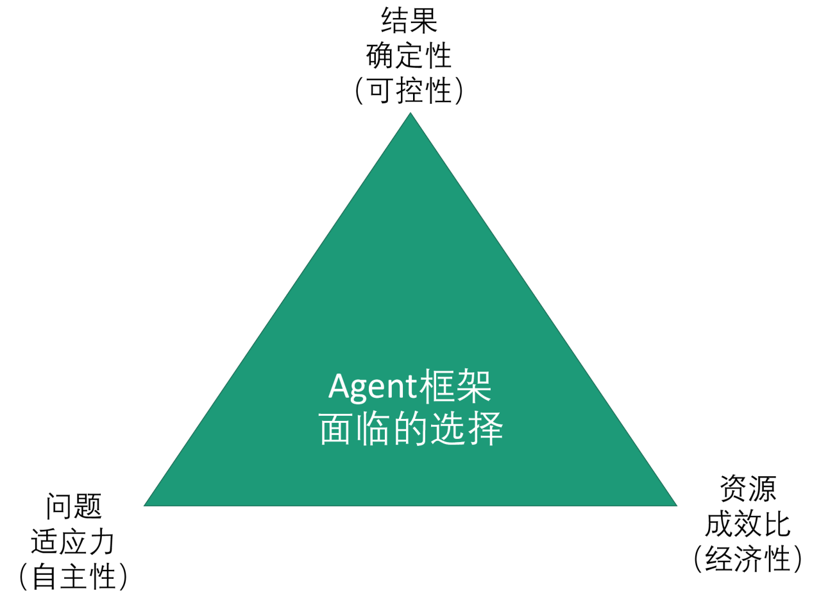
智能体Agent框架的不可能三角
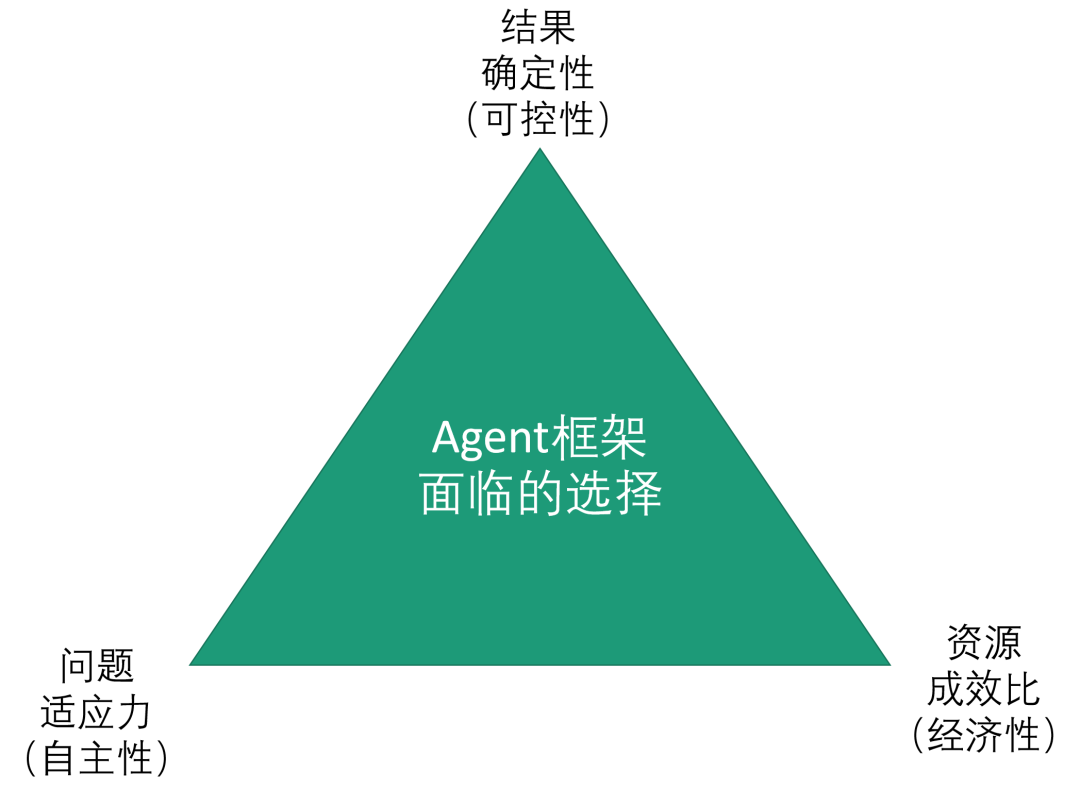
架构设计往往是一种权衡,我曾经针对区块链系统的提出CAS(Cost-Autonomy-Security)三原则,针对Agent框架我也提出了如上图所示的ACE原则,即问题的适应力--自主性(Autonomy),结果的确定性--可控性(Controllable)和资源的成效比 -- 经济性(Economy)。
Agent框架的不可能三角,体现了对Agent框架设计的三个核心关切:
- 充分探索能力上限。
- 确保结果安全可控。
- 解决方案经济可行。
那么这三个维度,我是如何定义的:
1. 自主性维度
Agent在无需人工干预的情况下,能独立完成复杂、多步骤任务的能力。包括目标分解、工具选择、错误恢复、策略调整等。
其理想表现为:高度自治,能处理长程、开放域任务,极少需要人类介入。
2. 可控性维度
Agent的行为能够被外部(设计者或用户)所理解、预测、约束和验证的程度。包括输出确定性、行为可解释性、安全边界可执行性。
其理想表现为:行为可预期,可审计,可回滚,能强制遵守硬性规则。
3. 经济性维度
Agent达成目标所需消耗的计算、时间、存储、经济等资源的性价比。通常以“单位资源产出的有效结果”衡量。
其理想表现为:低成本、低延迟、低能耗,快速响应。
Agent框架三角的内在矛盾
1. 自主性 ↔ 可控性:最经典的张力
高自主性要求
Agent需要拥有广泛的行动空间、灵活的推理机制、对环境的主动适应。它必须能够绕过预设路径,自行决定工具调用顺序,甚至重写自己的子目标。这会引入不可预测性——同样的初始状态可能因内部随机采样、学习经验或环境反馈而走向完全不同的行为轨迹。
高可控性要求
行为必须是可预测、可形式化约束的。典型手段包括:有限状态机、确定性规则引擎、输出格式校验、白名单工具集、人工断点。这些手段本质上会限制行动空间,减少自由决策点,从而压制自主性。
结论:自主性越高,行为空间越大,就越难对其施加完整的、可验证的控制。反之,严格的可控性会牺牲Agent的自主适应能力。
2. 自主性 ↔ 效率:长链条推理的代价
高自主性
通常意味着Agent需要执行多次LLM调用(规划、反思、工具调用、错误重试),需要维护长期记忆与工作记忆,需要探索多条可能的解决路径。这些操作都会显著增加计算成本和时间延迟。
高效率
追求的是以最少的资源消耗完成目标。最优效率路径往往是单次前向传递 + 硬编码规则,没有分支探索、没有自我纠错、没有动态重规划——而这些恰好是高自主性所必需的能力。
结论:提升自主性几乎必然引入额外开销(更多的token、更多的推理步骤、更复杂的记忆系统),从而降低单位资源的产出效率。追求极致效率则只能接受极低的自主性(例如单轮提示词完成的简单任务)。
3. 可控性 ↔ 效率:验证与约束的代价
高可控性
需要引入额外的机制来确保行为可预测、可验证。常见手段包括:多次采样投票、自一致性检查、输出格式校验、沙箱执行、人工确认断点、形式化验证。这些机制都会消耗额外的计算资源和时间。
高效率
追求最小化开销,倾向于放弃或简化这些验证步骤。例如,一个纯单次调用的LLM接口没有自检、没有重试、没有约束执行环境——它的效率极高,但输出可能格式错误、内容不合规、甚至产生危险操作,可控性很低。
结论:提升可控性需要以资源消耗为代价,与高效率形成直接冲突。反之,追求极致效率必然牺牲可控性
马虾Agent的驾驭实践(一)-- 驾驭方法
马虾Agent的驾驭实践(二)-- 踩坑实践
后续几篇将会讲讲不同的框架/模式和场景下,基于提出的不可能三角的取舍分析,然后探讨一下现在流行的几个Agent框架的架构设计关注点,分析一下Agent未来的演进分化和行业应用趋势。

图片
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-05-04,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号