特斯拉 Optimus Gen3 全维度解析

特斯拉 Optimus Gen3 全维度解析

霞姐聊IT
发布于 2026-04-28 12:22:01
发布于 2026-04-28 12:22:01
特斯拉将其人形机器人命名为“Optimus”,是为了向《变形金刚》中OptimusPrime(擎天柱)这一领导者角色致敬,并象征其对未来机器人智能和人类协作的宏大愿景。
这一命名反映了特斯拉希望将其机器人技术发展成能够承担重要社会责任、解放人类劳动力并引领未来科技进步的重要工具。
一、发展时间线
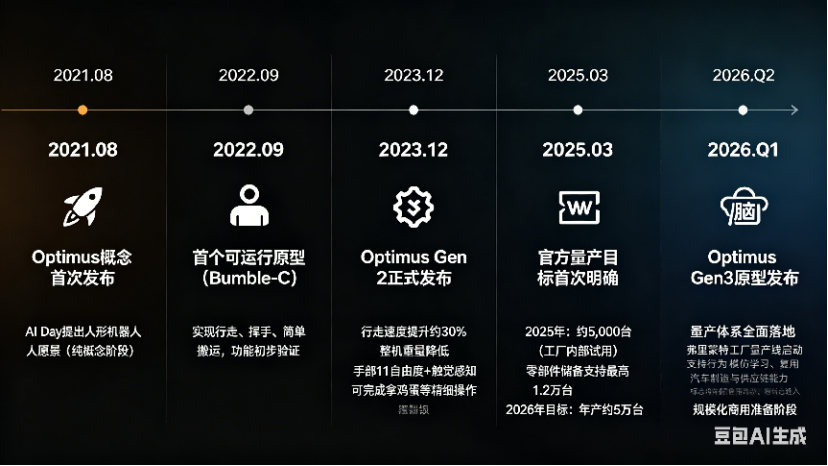
特斯拉的Optimus,于2021年8月的AI日上进行概念演示以来,经过了Gen1概念验证阶段、Gen2工程优化阶段,目前处于Gen3量产工程化阶段。
Optimus Gen3是首个专门为量产打造的Optimus版本,正处于开发的最后阶段。预计2026年夏季开始生产,2027年将实现数万辆的高产量生产。
二、OptimusGen3
OptimusGen3身高173厘米,体重约57公斤,整机采用28个全身自由度,搭配大幅升级的22自由度灵巧手,精细操作能力接近人类水平。躯干内置2.3千瓦时锂电池,支持轻度至中度任务连续续航约8小时,最高步行速度可达8.4公里/小时。

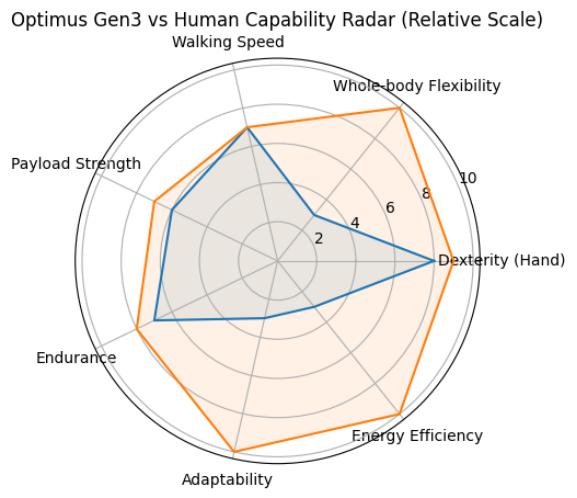
与人类相比,Optimus在身高与体重上已经接近成年人的平均水平。其手部灵巧性也显著提升,约22个自由度,已接近人类手部(约20–27自由度)的能力区间。在移动能力方面,其最高步行速度已达到人类快走到慢跑的边界。
不过,从整体身体能力来看,Optimus仍与人类存在明显差距。人类全身约拥有200+自由度,在运动灵活性、协调性和稳定性方面远优于当前机器人系统。 在负载能力方面,Optimus预计可承担约20kg级别任务;相比之下,人类在短时间内可以承受更高负重,但难以长期稳定输出。 在续航能力(Endurance)上,Optimus可实现约8小时的稳定运行,而人类虽然整体耐力更强,但受体力与状态波动影响较大。 在环境适应能力(Adaptability)方面,人类依然具备显著优势,能够灵活应对复杂、非结构化环境,而当前机器人主要适用于结构化或半结构化场景。 而在能效比(EnergyEfficiency)上,人类的优势尤为明显:人体在运动和操作中的能量利用效率远高于机器人系统,而现阶段人形机器人在单位能耗下的输出能力仍然偏低,这也是限制其大规模应用的关键瓶颈之一。
Optimus可以用于:
工业场景:产线装配、物料搬运、设备巡检、精密操作
商业场景:仓储分拣、门店服务、安防值守
家庭场景:家务清洁、老人照护、简单烹饪、物品整理
目标客户是:
2026年:企业客户(汽车制造、3C电子、物流仓储)
2027年起:普通家庭、养老机构、服务场所全面开放民用
Optimus量产版官方指导价约2万~2.5万美元(约14~18万人民币),长期目标降至2万美元以内,主打普惠民用。
三、Optimus技术解析
1.Optimus vs FSD(自动驾驶)
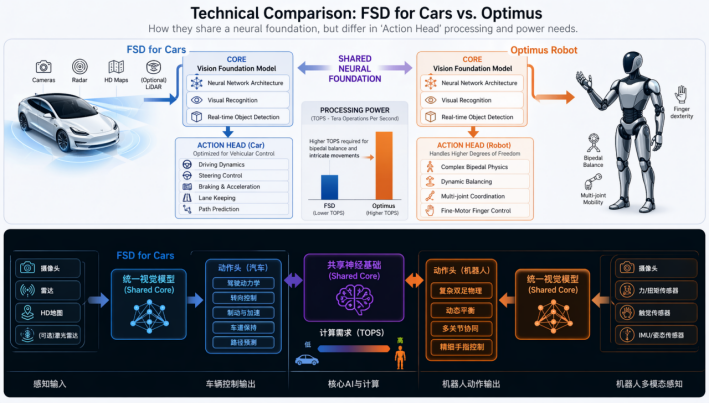
Optimus和FSD共用完全同源的核心视觉基础模型,依托同一套底层神经网络架构,共享视觉识别、实时目标检测的通用环境感知能力。
这意味着Optimus 直接复用了特斯拉历经海量真实道路数据打磨的自动驾驶视觉体系,无需从零搭建空间感知能力,也是特斯拉人形机器人最核心的技术先发优势。
在底层模型之上,两端技术路线开始分化。
面向车辆场景的FSD系统,其动作执行模块完全围绕车载行驶优化,仅需完成行驶动力学调控、转向控制、加减速控制、车道保持等低自由度车辆控制任务,整体运动逻辑简单,算力需求相对更低。
而Optimus 人形机器人在同源视觉大脑的基础上,动作执行端实现了全方位升级。
机器人需要处理远高于汽车的全身运动自由度,不仅要实现复杂双足行走物理建模、全时段动态重心平衡,还要完成全身多关节协同、手指精细操作等高难度运动控制。
与之对应,双足平衡与复杂精细动作对实时AI运算提出了指数级更高的要求,Optimus 整机所需的端侧算力(TOPS)显著高于车载 FSD 系统。
2.计算与学习体系
Optimus 的核心技术并非局限于单一硬件或算法模块,而是依靠一套完整统一的计算与智能学习体系。该体系将云端训练、端侧推理与远程软件迭代融为一体,形成可持续进化的技术闭环,让机器人拥有与自动驾驶系统同源的自主迭代能力。
在端侧推理层面,Optimus Gen3 搭载特斯拉新一代 AI5(Hardware 5.0)芯片作为整机神经中枢。
芯片原生适配端到端神经网络架构,能够将实时视觉输入直接转化为机体动作指令,无需依赖人工预设规则与传统中间规划模块。
这一架构的核心意义在于,机器人的全部行为,由视频输入到动作输出的端到端模型直接映射生成。
AI5芯片每秒可执行2500万亿次运算。在类人机器人中,这种原始能力被用来同时运行多个神经网络:
愿景网络:为了看到并标记物体。
运动学网络:计算每个关节的位置。
安全网络:一个冗余层,确保机器人在人类附近永远不会超过力量限制。
在云端训练层面,Optimus 采用 Cortex通用 GPU 集群+Dojo 自研超算的混合训练架构,同时深度复用特斯拉自动驾驶沉淀多年的海量数据与成熟训练管线。
依托这一技术复用优势,机器人无需从零搭建底层世界模型,直接继承了经过海量场景验证的视觉感知与行为映射能力。
感知系统层面:Optimus 延续了特斯拉标志性的纯视觉优先路线,以多路摄像头作为核心感知入口,搭配 IMU 姿态传感、关节力觉传感与手部触觉传感作为补充。
整体感知体系具备三大核心特征:以视觉信息作为统一主干输入、实现视觉与力觉、姿态等多模态数据深度融合、实时构建全局环境空间表征。
和自动驾驶方案一致,整机不搭载激光雷达,完全依靠神经网络从视觉画面中学习空间结构、物体属性与场景语义。
从本质上来讲,视觉对于 Optimus 而言不再只是单纯的环境传感器,更是机器人构建自身世界模型的核心输入接口。
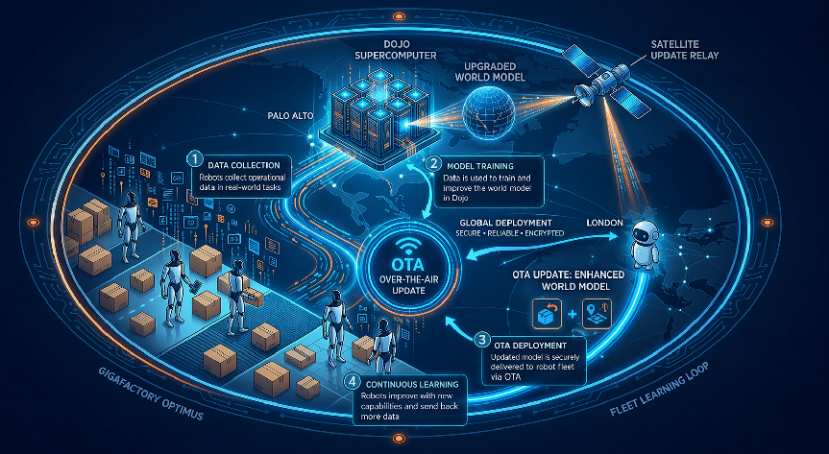
除此之外,Optimus 原生支持全栈 OTA 空中远程升级(FOTA 全固件升级),整套升级体系完全继承自特斯拉成熟的自动驾驶技术底座。
该能力彻底打破了传统人形机器人出厂即定型的局限,无需拆机返厂,便可远程完成运动算法优化、AI 模型迭代与全新技能解锁。
同时 OTA 打通了全球终端数据闭环,设备运行数据回流云端训练优化后,新模型可批量推送至所有机器人,实现群体共同进化。
这不仅有效降低了厂商量产成本与用户售后维护成本,更为 Optimus 从工业场景商用逐步走向普通家庭民用的全场景落地铺平道路,是产品长期生命力的核心支撑。
3.行为生成系统
传统人形机器人普遍采用感知—规划—控制的分层模块化架构,而 Optimus 则基于端到端神经网络,将整套流程整合为一体化连续系统,彻底打破传统分层结构。
该架构具备以下核心特征:
由视频输入直接输出力矩级动作指令(torque-level output)
实现感知与控制的统一融合
单模型可支撑多任务通用执行
这种架构带来了关键性优势:系统无需进行显式的路径与动作规划,仅依靠数据训练学习得到隐式行为策略。
在综合能力构建上,Optimus 融合了多种智能学习机制:
通过模仿学习复刻人类操作技能,借助强化学习在交互试错中持续优化机体行为,同时接入Grok 大语言模型实现上层自然语言理解与任务拆解。
由此打通了语言输入→语义认知→机体动作的完整智能链路。
更为核心的是,特斯拉明确提出了自身的技术理念:
机器人的智能决策不应被拆分为多层独立模块,而应当是一个完整、连续、端到端的统一过程。这一设计思路,从底层架构上直接挑战并颠覆了行业沿用已久的传统机器人分层体系。
4.机械与执行系统
Optimus Gen3 采用仿生类人机械结构,整机拥有28 个全身自由度、22 个手部自由度,搭载高功率密度执行器,整体设计适配人类环境、侧重精细操作,并兼顾结构一体化量产需求。
自重对于人形机器人至关重要,额外重量会加重关节损耗、拉高能耗、压缩续航。
特斯拉经过极致轻量化优化,将整机重量控制在57 公斤,轻于普通成年人,同时依托多元先进材料兼顾结构强度与耐用性。
机身主体采用定制铝镁合金,相较传统钢架减重 65%,强度比肩普通钢材且抗疲劳性能优异;四肢高应力部位使用航空级碳纤维,强度达到钢材 10 倍、重量仅为钢材 20%;髋膝肩等核心承重关节采用5 级钛合金,强重比优异、耐腐蚀性强。
热管理上采用机身内嵌一体化散热设计。
针对机器人运行时电机、AI 芯片、电池、关节摩擦产生的热量,将微型液冷通道集成于机身骨架内部,依托机身结构导热散热,无需额外散热组件,结合不同材料导热特性合理排布,实现热量高效疏导,避免核心部件过热。
同时机身表面做多层防护处理,提升耐磨、防水与抗老化能力,并依托精密铸造、3D 打印、自动碳纤维铺层等先进工艺实现复杂结构成型,搭配严格品控保证整机性能稳定。
灵巧手部分技术突破显著,单手11个自由度,执行器均集成于前臂,通过钢索滑轮驱动指关节,兼顾灵活度与操控力。
指尖搭载高精度多维力传感器,感知精度低至0.1 牛顿,力控范围覆盖 0.1N~450N,可自适应调节抓取力度,轻柔处理易碎物品、稳定搬运重物,并可根据物体形态自动切换握持方式,完成通用工具操作。
多层安全防护机制,也保障了人机近距离协作的安全性。
能源方面沿用特斯拉车载电池技术,高能量密度电池集成于躯干内部,可支撑机器人长时间连续作业。
5.工程化与制造体系
Optimus Gen3 最核心的突破并非单纯的性能升级,而是完整的量产工程化能力。
与此前仅用于技术演示的初代原型机截然不同,Gen3 是特斯拉首款面向量产定型设计的通用人形机器人。
在整体工程设计上,产品全面围绕工业化落地展开,采用高度模块化机身架构,各结构、执行器、传感单元独立集成,便于拆装维护、批量组装与后期迭代;
同时从材料选型、结构设计到部件选型进行全链路成本优化,深度整合全球成熟供应链体系,复用汽车工业百年制造标准,打通完整量产配套链路。
依托特斯拉成熟的汽车制造底盘,特斯拉正式启动产线产能转型,将弗里蒙特工厂原有整车产线改造为 Optimus 专属柔性装配产线,复用自动化产线设备、精密制造工艺与整车品控体系,搭建规模化量产产能。
在此基础上,特斯拉进一步布局机器人自产机器人的闭环制造模式,由量产机器人参与自身零部件装配、工序作业,持续提升生产效率、摊薄单台成本,稳步迈向百万台级别的大规模量产目标,真正实现从实验室AI技术,走向可批量交付的民用工业级产品。
四、结语
从 2021 年 AI 日的概念初现,到 Gen3 的量产落地在即,特斯拉 Optimus 的进化之路,本质上是一场技术复用与创新突破的双向奔赴:
它以 FSD 自动驾驶技术为根基,通过全栈自研的计算体系、颠覆传统的行为生成架构、极致优化的机械设计,以及成熟的汽车级量产体系,真正让通用人形机器人从科幻走向现实。
尽管当前 Optimus 在运动灵活性、能效比、复杂环境适应等方面仍与人类存在差距,但特斯拉以量产为核心的工程化思路,以及 OTA 持续进化、数据闭环迭代的模式,正在不断缩小这一鸿沟。
从 2026 年面向企业客户的规模化生产,到 2027 年向普通家庭开放民用,Optimus激进目标承载的不仅是特斯拉解放人类劳动力的愿景,也是其重塑工业生产、家庭服务、社会养老等多个领域的形态的野心。
未来,随着技术的持续迭代与成本的稳步下降,Optimus 或许将成为人类协作的伙伴,真正兑现 “擎天柱” 所象征的引领意义,开启人机共生的全新科技时代。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-04-21,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号