ROS2 为什么需要 LifecycleManager


公众号致力于点云处理,SLAM,三维视觉,具身智能,自动驾驶等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。文章未申请原创,未经过本人允许请勿转载,有意转载联系微信920177957。
摘要
在 ROS 2 的使用过程中,很多开发者都会有一个疑问:节点启动之后直接运行不是更简单吗,为什么还要引入“生命周期管理”这种看起来更复杂的机制?
这个问题在做简单 Demo 时并不明显,但一旦进入系统级开发,比如自动驾驶、人形机器人或工业巡检系统,就会迅速暴露出问题——没有生命周期管理,系统几乎是不可控的。
在早期的 ROS 中,节点的运行模式非常直接:启动即运行,异常即退出,恢复依赖脚本。这种模式在小规模系统中尚可接受,但在复杂系统中会带来启动顺序混乱、依赖失效以及系统无法自恢复等一系列问题。系统中的各个模块更像是“各自为战”,而不是一个统一协调的整体。
Lifecycle 的本质:让节点“有状态”
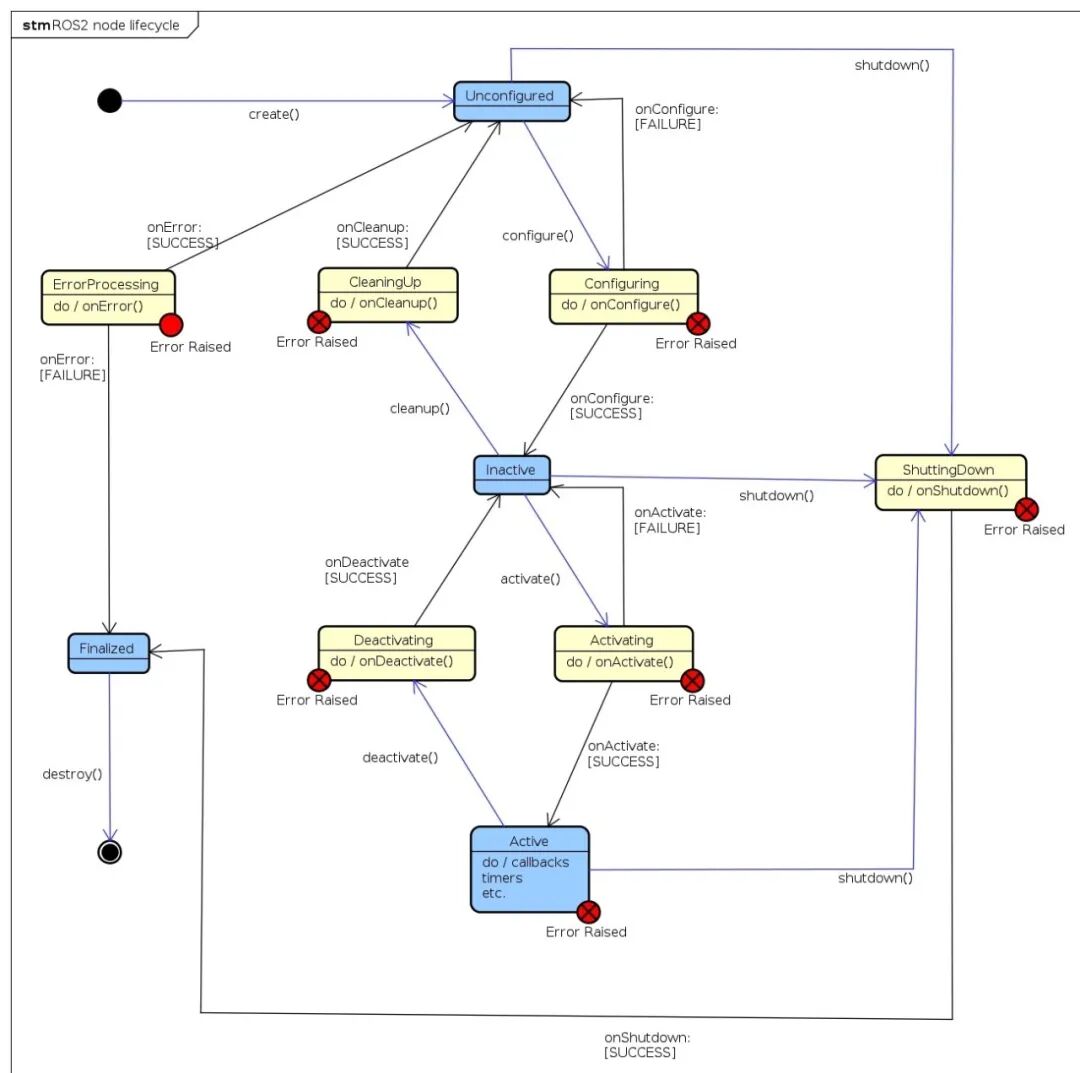
正是为了解决这些问题,ROS 2 引入了 Lifecycle(生命周期)机制。它的核心思想,是将节点从“无状态执行单元”升级为“具备明确状态机的受控实体”。
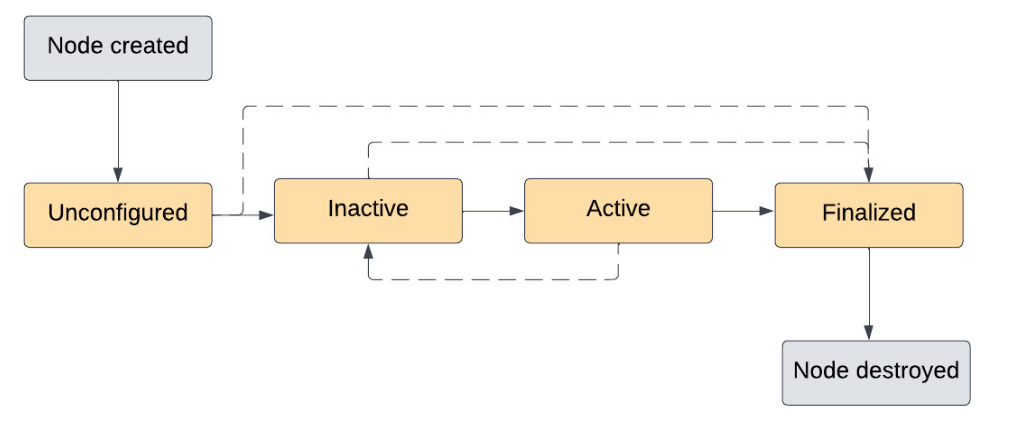
在这种模型下,一个节点不再是启动就开始工作,而是需要经历多个阶段,例如 Unconfigured、Inactive、Active 和 Finalized。每一个阶段都有明确的语义:在 configure 阶段完成资源初始化,在 inactive 状态保持就绪但不输出数据,在 activate 后才真正参与系统运行。
这种设计带来的关键变化,是系统可以精确控制“何时开始工作”。例如一个传感器节点,可以在所有依赖准备完成之后再统一激活,从而避免数据异常或系统抖动的问题。这种能力在复杂系统中至关重要。
LifecycleManager:系统真正的“大脑”
如果说 Lifecycle 定义了规则,那么 LifecycleManager 就是执行这些规则的核心组件。它可以被理解为整个系统的调度中枢,负责统一管理多个 Lifecycle 节点的状态。
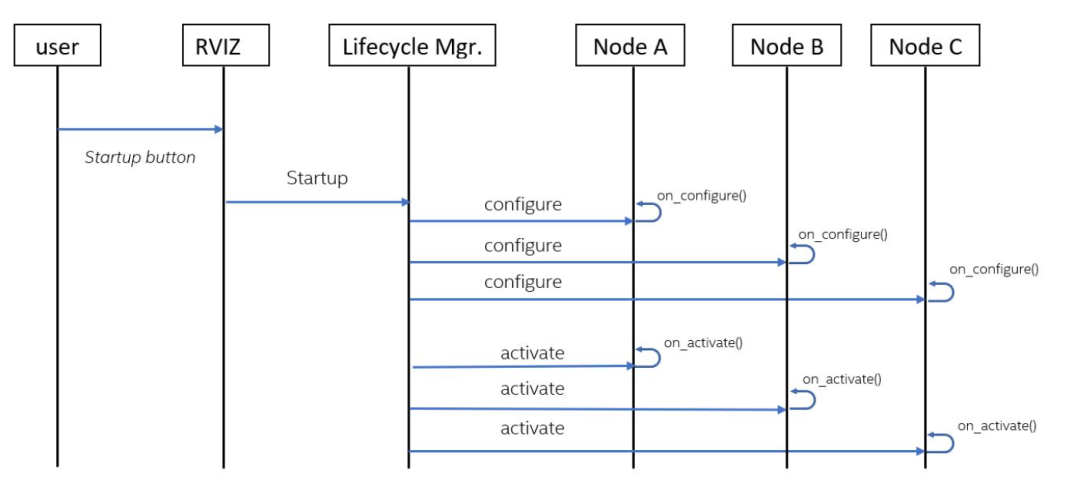
LifecycleManager 最重要的能力,是对系统进行“有序启动”。在一个典型系统中,它会先触发所有节点的 configure,然后按照依赖关系依次 activate。例如先启动传感器,再启动定位模块,最后启动规划与控制模块。通过这种方式,可以确保数据链路在每一个环节都是有效的。
除了启动控制之外,LifecycleManager 还具备自动恢复能力。当某个节点发生异常时,它可以将节点回退到安全状态,并重新执行配置与激活流程,从而实现系统级的自愈。这一点对于需要长期稳定运行的机器人系统尤为关键。
此外,LifecycleManager 通常还会提供标准服务接口,例如 startup、shutdown 和 reset,使得上层系统(如调度平台或可视化界面)可以直接控制整个系统状态。这使得机器人系统真正具备了“可运维”的能力。
工程实践:Nav2 为什么强依赖 LifecycleManager?
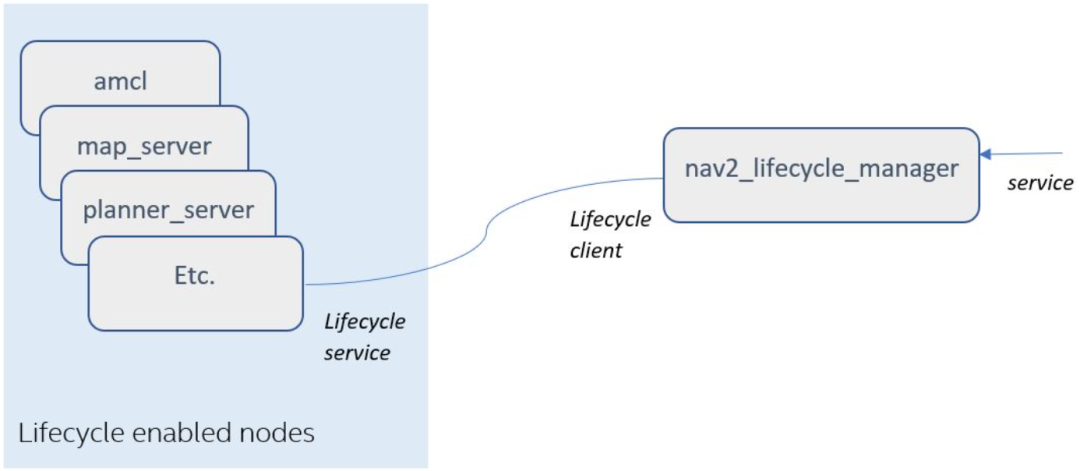
在 Nav2 中,LifecycleManager 是一个不可或缺的核心组件。这是因为 Nav2 本质上是一个强依赖链系统,从地图、定位到路径规划和控制,每一个模块都必须严格就绪,否则整个系统无法正常工作。
因此,Nav2 中的所有关键节点都实现为 LifecycleNode,并统一交由 LifecycleManager 管理。这种设计保证了系统在启动、运行和异常恢复过程中始终处于可控状态,也成为 ROS2 工程化应用的一个标准范式。
什么时候你必须使用 LifecycleManager?
当你的系统开始具备以下特征时,LifecycleManager 就不再是“可选项”,而是“必选项”:系统中包含多个节点、模块之间存在依赖关系、需要支持异常恢复,或者项目正在走向产品化落地。
在这些场景中,如果仍然采用传统的启动方式,很容易出现系统不稳定、难以调试甚至无法维护的问题。而 LifecycleManager 提供的,是一种系统级的解决方案。
实战:实现一个 ROS2 LifecycleNode
理解原理之后,我们直接来看一个可运行的 LifecycleNode 示例。这个示例实现了一个简单的发布节点,只有在 Active 状态下才会真正发布数据。
节点定义
#include <rclcpp/rclcpp.hpp>
#include <rclcpp_lifecycle/lifecycle_node.hpp>
#include <std_msgs/msg/string.hpp>
using CallbackReturn = rclcpp_lifecycle::node_interfaces::LifecycleNodeInterface::CallbackReturn;
class SimpleLifecycleNode : public rclcpp_lifecycle::LifecycleNode
{
public:
explicit SimpleLifecycleNode(const std::string & name)
: rclcpp_lifecycle::LifecycleNode(name)
{
RCLCPP_INFO(get_logger(), "Lifecycle node constructed");
}生命周期回调
CallbackReturn on_configure(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(get_logger(), "Configuring...");
publisher_ = this->create_publisher<std_msgs::msg::String>("lifecycle_topic", 10);
timer_ = this->create_wall_timer(
std::chrono::seconds(1),
std::bind(&SimpleLifecycleNode::timer_callback, this)
);
return CallbackReturn::SUCCESS;
}
CallbackReturn on_activate(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(get_logger(), "Activating...");
publisher_->on_activate();
return CallbackReturn::SUCCESS;
}
CallbackReturn on_deactivate(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(get_logger(), "Deactivating...");
publisher_->on_deactivate();
return CallbackReturn::SUCCESS;
}
CallbackReturn on_cleanup(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(get_logger(), "Cleaning up...");
publisher_.reset();
timer_.reset();
return CallbackReturn::SUCCESS;
}
CallbackReturn on_shutdown(const rclcpp_lifecycle::State &)
{
RCLCPP_INFO(get_logger(), "Shutting down...");
return CallbackReturn::SUCCESS;
}核心运行逻辑
private:
void timer_callback()
{
if (!this->is_activated())
return;
std_msgs::msg::String msg;
msg.data = "Hello from LifecycleNode";
publisher_->publish(msg);
}
rclcpp_lifecycle::LifecyclePublisher<std_msgs::msg::String>::SharedPtr publisher_;
rclcpp::TimerBase::SharedPtr timer_;
};主函数
int main(int argc, char ** argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<SimpleLifecycleNode>("simple_lifecycle_node");
rclcpp::spin(node->get_node_base_interface());
rclcpp::shutdown();
return 0;
}启动节点后,可以通过命令控制状态流转:
ros2 lifecycle set /simple_lifecycle_node configure
ros2 lifecycle set /simple_lifecycle_node activate只有在 activate 之后,节点才会真正开始发布数据。这正是 Lifecycle 设计的核心意义。
总结
LifecycleNode 解决的是“单个节点如何变得可控”,而 LifecycleManager 解决的是“整个系统如何被调度”。两者结合,才构成了 ROS2 的工程化基础。
如果说 ROS1 让你可以快速搭建机器人系统,那么 ROS 2 则让你可以真正构建一个稳定、可维护、可扩展的工程系统。一句话总结就是:没有生命周期管理,你只是在运行节点;而引入 LifecycleManager,你才是在构建系统。
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-04-12,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号