用于逆动力学计算的 ROS2 软件库


文章:A ROS2-based software library for inverse dynamics computation
作者:Vincenzo Petrone,Enrico Ferrentino and Pasquale Chiacchio
编辑:dianyunPCL
代码:https://github.com/unisa-acg/inverse-dynamics-solver.git
摘要
逆动力学计算是机器人控制、规划与仿真中的关键组成部分,它用于计算实现期望运动所需的关节力矩。本文提出了一种基于 ROS 2 的软件库,用于求解机器人系统的逆动力学问题。该库以一个抽象类为核心,并提供了三种具体实现:一种用于仿真机器人,另外两种分别面向真实的 UR10 机器人和 Franka 机器人。本工作的目标是提供一种灵活、可扩展、与具体机器人无关的逆动力学解决方案,适用于同时涉及规划与控制应用的仿真环境和真实场景。相关软件已开源,地址为:
https://github.com/unisa-acg/inverse-dynamics-solver/tree/rap
主要贡献
本文的主要贡献是提出了一种基于 ROS 2 的机器人逆动力学计算软件库,用于求解机器人系统逆动力学问题。该模块针对逆动力学求解中对灵活性、可扩展性以及与具体机器人平台无关性的需求,提供了一种通用解决方案。
该软件库以一个名为 Inverse Dynamics Solver(IDS) 的抽象类为核心,定义了逆动力学计算的通用接口,从而保证其在多种机器人平台上的广泛适用性。本文还提供了该抽象类的三种具体实现,如图 1 所示:
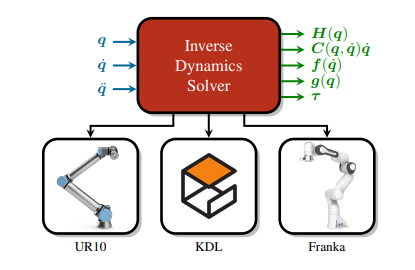
图1, 逆动力学求解器库及其具体实现
1. 面向仿真机器人的通用实现
该实现基于 KDL,适用于 Gazebo 等 ROS 生态中的物理仿真器。该方法利用仿真机器人提供的运动学与动力学参数,计算相应的动力学分量。
2. 面向真实机器人的两种实现
这两种实现针对具体的机器人平台进行了定制,分别适用于广泛应用的 UR10 和 Franka 机械臂。实现中考虑了真实世界中的动力学特性,包括非线性摩擦模型,因此适用于最优规划、精确控制以及 hardware-in-the-loop(硬件在环) 测试等应用场景。
该软件库的主要目标是提供一个稳健且可复用的工具,用于在仿真环境和真实场景中统一地进行逆动力学计算,并特别强调其在 ROS 2 系统中的易集成性。通过采用模块化设计与清晰的抽象结构,该软件库旨在简化逆动力学求解器在各类机器人应用场景中的集成与使用。
主要内容
这个库解决了什么问题?
在理论上,逆动力学公式很简单:

但在工程中,真正麻烦的从来不是公式,而是:
- 不同机器人动力学模型完全不同
- 仿真和真实机器人差异巨大
- 摩擦项到底要不要算?怎么算?
- 控制 / 规划 / 仿真模块如何统一接口?
IDS 的目标很明确:提供一个 ROS 2 原生、机器人无关、可插拔的逆动力学求解框架
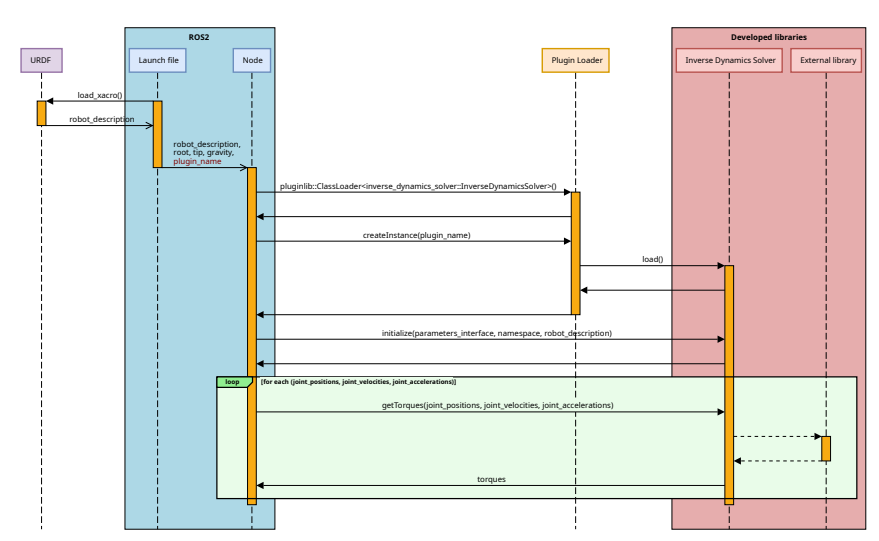
图2. 时序图:用户可通过launch文件指定参数plugin_name,使用pluginlib实例化IDS库;具体求解器会调用外部库以获取动力学组件。
IDS 并不只是“给你一个力矩 τ”,而是把逆动力学拆解成可独立使用的组件,可以单独获取:
- 惯性矩阵:H(q)
- 科氏/离心项:C(q, q̇) q̇
- 重力项:g(q)
- 摩擦项:f(q̇)
- 或直接获取 τ
为什么默认不算摩擦?这是一个非常“工程化”的设计选择。摩擦通常不依赖线性动力学参数,摩擦模型可能是线性的,也可能是高度非线性的,很多现代机器人控制器已经在底层补偿了摩擦所以 IDS 默认设定 f(q̇) = 0,如果需要摩擦,就用专门的真实机器人实现这个设计思路非常务实:仿真优先简洁,真实机器人再追求精度。
核心设计思想:Plugin + 抽象接口
IDS 采用了 ROS 里非常成熟的一套思路:pluginlib + 抽象类,因为 ROS 生态的核心需求是:“同一套代码,换机器人还能用”。关键点只有一个上层逻辑不关心你怎么算动力学 ,用户只关心你能不能给 H、C、g、τ
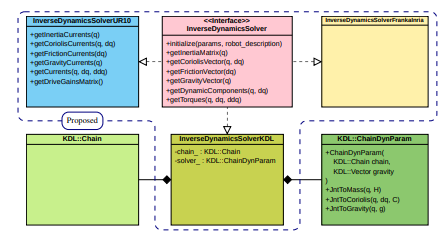
图 3. 类图:为简洁起见,省略了具体实现从接口继承的方法。
抽象基类:InverseDynamicsSolver这是整个库的“灵魂”。
它定义了一套统一接口:
- initialize(...):加载 URDF、重力方向、关节链
- getInertiaMatrix() → H(q)
- getCoriolisVector() → C(q, q̇) q̇
- getGravityVector() → g(q)
- getFrictionVector() → f(q̇)
- getTorques() → τ
控制器、规划器、仿真模块只依赖这套接口
KDL 求解器:仿真专用InverseDynamicsSolverKDL
- 基于 KDL
- 从 URDF 构建运动学链
- 计算 H、C、g
- 不考虑摩擦
适合场景:Gazebo / Ignition 仿真,算法验证,控制结构调试。一句话总结:“能跑就行,快、稳、通用”。
ROS 2 工程细节,真的很“顺”,几个很舒服的工程细节:
- URDF 用 xacro 解析
- root / tip 可配置(不是只能全机械臂)
- 重力方向可配置
- 所有矩阵统一用 Eigen
- 天然适配控制 / 规划 / 优化代码
实验结果
本文通过仿真与真实机器人实验验证了 IDS(逆动力学求解器)的有效性与机器人无关性。实验中采用同一套统一接口,对仿真和真实环境下的 UR10 与 Franka 机械臂获取动力学分量,仅通过切换插件即可适配不同机器人平台。
在仿真实验中,基于 KDL 的求解器被集成至 Gazebo 环境,通过 ros2_control 轨迹控制器驱动机器人运动。计算得到的关节力矩与仿真中使用的力矩完全一致,表明该求解器可作为机器人无关的动力学补偿模块,可靠地用于任意仿真机器人的力矩控制。
在真实机器人实验中,针对 UR10 和 Franka 机械臂,IDS 计算得到的关节力矩与实际测量结果高度一致,验证了所采用动力学模型及软件实现的正确性。其中,Franka 求解器显式建模了非线性摩擦项,相较于厂商接口具有更强的建模能力,尤其适用于离线规划和基于模型的控制等应用场景。
总结
本文提出了一种基于 ROS 2 的、机器人无关的逆动力学求解库。在给定关节位置、速度和加速度的情况下,该软件能够计算机械臂各关节所受的力矩,同时提供影响系统运动方程(EOM)的各类动力学分量。发布并完整文档化了该代码库,其中包括:
- 一个统一的接口,用于获取各类动力学分量;
- 三种具体实现:
a. 两种实现了真实机器人(UR10 与 Franka)的系统辨识动力学模型;
b. 一种基于 KDL、适用于仿真机器人的实现。
通过所提供的抽象基类,ROS 2 社区中的其他用户也可以针对不同的机器人平台,扩展并实现新的具体求解器。该即用型软件库可直接应用于轨迹规划、控制算法以及仿真系统中,为各类需要进行动力学估计或补偿的机器人应用提供了一个实用工具。本文在仿真和真实机器人场景下对软件进行了验证,证明其在所测试的机械臂上能够正确计算关节力矩。
未来工作将包括:引入机器人末端负载(payload)信息,因为其可能显著影响系统动力学;基于 Pinocchio 库 实现新的具体求解器;将该逆动力学求解器集成到 基于模型的控制器(如逆动力学控制器或重力补偿控制器)中,并以独立 ROS 2 软件包的形式发布。
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-01-29,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号