人形机器人冗余自由度的协调

人形机器人冗余自由度的协调

CreateAMind
发布于 2026-03-11 17:39:18
发布于 2026-03-11 17:39:18
Coordinating the Redundant DOFs of Humanoid Robots by Pietro MorassoORCID
人形机器人冗余自由度的协调
https://www.mdpi.com/2076-0825/14/7/354
摘要:
新一代机器人(工业5.0及以后)预计将伴随着大量自主与协作型智能体在社会中的广泛应用,涵盖工业与服务领域。通过采用具有类似人类运动学结构及运动学冗余度的人形机器人,将简化与人类的协作,这种冗余度是应对未来多样化任务所必需的。本文提出一种受生物启发的方法,用于协调此类智能体的冗余自由度。该方法基于动作的意动理论(ideomotor theory of action),并结合被动运动范式(passive motion paradigm),以隐式方式解决自由度问题,无需进行任何运动学逆解,同时生成符合生物运动典型特征的协调运动模式。此外,由于该方法基于力场,允许我们集成并行计算模块,利用系统的冗余性,通过适当的排斥力场实现几何或运动学约束。同时,该模型进一步扩展,纳入与人形机器人拉格朗日动力学相关的动力学约束,以提升所生成动作的能量效率。
关键词:仿生机器人;认知机器人;动作的神经模拟;前瞻;被动运动范式;生成式身体图式;自由度问题
- 引言 根据定义,人形机器人在形态上模仿人体。然而,这种形态相似性必须与类人的功能性目标充分融合,才能在诸多实际应用中与人类协作,例如学会使用人类工具并理解环境。这一领域曾长期属于科幻范畴,如今正日益成为技术界关注的焦点,据市场研究机构Market Research Future®预测,2024至2032年间该领域的复合年增长率将超过50%。这一预期的传统认知基础在于,人们相信其发展将由人工智能(AI)技术驱动,并外推近期基础模型(如大型语言模型LLMs或视觉语言模型VLMs [1,2])所展现出的惊人性能。然而,问题在于,尽管具身人工智能(EAI)曾尝试定义一种轻度具身化的AI形式,但主流AI方法本质上仍是“非具身化”的。相比之下,人类认知系统本质上是具身化的[3–5],这促使我们采用一种基于发育原理的仿生方法来研究人形机器人[6],以实现人与机器人之间的相互理解[7,8]。
一种仿生的人形机器人方法,首先必须在计算层面解决复杂身体动作的组织问题。人形机器人与人类共同面临的问题是如何协调一个具有多个关节、结构复杂的冗余身体,以完成有目的的动作。最早科学地研究这一问题的学者可能是尼古拉·伯恩斯坦(Nikolai Bernstein)[9]。他观察了从事重复性工作的专业人员(如铁匠锤击)的表现,发现尽管每次锤击轨迹高度精确,但参与任务的冗余关节的旋转模式却表现出高度变异性。基于这些观察,伯恩斯坦[10]提出了运动冗余的一般性问题,即大脑必须解决的问题:运动系统需要生成的控制信号数量远多于表征和约束典型熟练动作的变量数量。他提出,解决方案在于消除冗余自由度,使大脑仅聚焦于关键要素。
运动冗余问题——即如何协调过多自由度(DOFs)——与人类多关节运动的实证特征密切相关:无论调用多少自由度,末端执行器的运动均表现出时空不变性;例如,伸手动作中速度呈钟形曲线分布,或手部一般手势(如草书书写)中速度与曲率呈反相关关系[11]。事实上,这些时空不变性反映了生物运动在全身动作中普遍具有的平滑性[12]。它们可用“最小急动度模型”(minimum jerk model)[13]加以解释,该模型隶属于生物运动能量节俭性这一显著特征的理论框架,这一点已在人类运动控制[14]和工业机器人领域[15]得到验证。
生物运动平滑性与图形运动学不变性涌现之间的内在逻辑,可追溯至19世纪心理学家威廉·詹姆斯(William James)[16]等人提出的意动理论(ideomotor theory),该理论近年已获得更坚实的神经生理学支持[17,18]。根据该理论,熟练个体的大脑启动导致有目的动作执行的计算过程时,并非从详细协调参与动作的自由度及其对应肌肉激活模式入手,而是先构想相关感官后果(如末端执行器的预期轨迹)。简言之,一个“动作意象”介于行动意图与具体运动控制模式生成之间。问题在于,如何在计算上表达这一过程——它要求处理身体自由度数量与表征动作意象参数数量之间巨大的不平衡。这种不平衡在人类身上已相当显著,但在其他物种(如象鼻或章鱼触手等具有无限自由度的肌肉静水骨骼结构)面前则相形见绌。另一方面,值得注意的是,大象有目的动作的不变特征[19]与人类生物运动的特征非常相似。
针对自由度不平衡问题,研究者们提出了多种截然不同的评价视角。例如,一些研究者(负面地)称之为“冗余”[20],而另一些研究者[21]则(正面地)称其为“运动丰富性”(motor abundance),强调其带来的灵活性与适应性,能够应对熟练行为中各种辅助性需求。
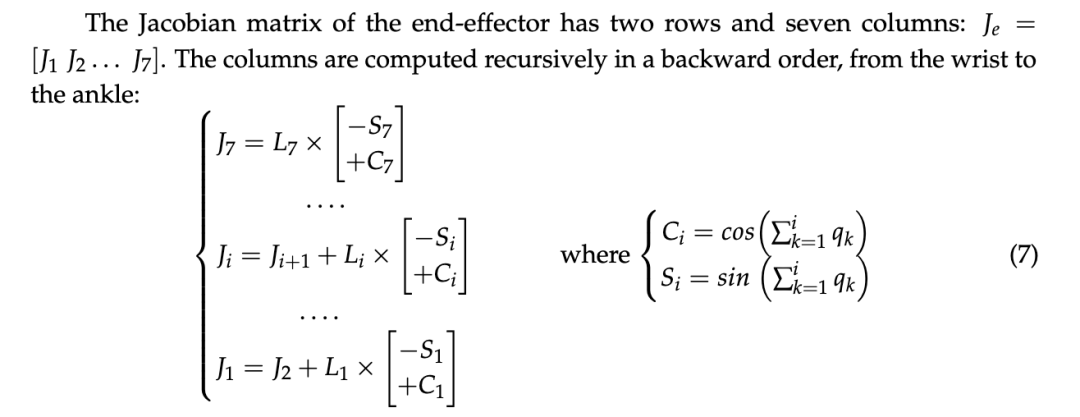
在机器人操作臂领域,运动学冗余问题早已确立,主要被表述为逆运动学问题。与正运动学(将关节旋转模式映射为身体各部分——即不同末端执行器——的运动规律)相比,这是一个复杂问题:正运动学是定义良好、具有唯一解的问题(无论自由度数量多少),而逆运动学则是病态问题,可能具有无穷多解或无解。机器人学中提出的方法数量庞大,大多数聚焦于雅可比矩阵,采用各种伪逆形式,但随着机器人结构冗余度增加(如人形机器人),其计算鲁棒性下降。特别是,许多方案基于1980年代发展的零空间投影技术[22–24]。然而,大多数机器人冗余度解决方案未能将逆运动学过程与生物运动典型的平滑性特征或关节协调旋转模式需满足的各种约束(如自由度运动范围、执行器扭矩范围、双足站立稳定性范围等)相结合。
本文所提出的方法具有仿生特性,广义上建立在对前述“运动丰富性之福”的认知之上,并以此方式整合了意动理论的基本要素、生物运动的内在平滑性,以及多重约束满足能力。其核心模块是一种名为“被动运动范式”(Passive Motion Paradigm, PM)[25–27]的计算模型。该模型与许多机器人方法一样基于身体图式的雅可比矩阵,但不尝试对其进行逆运算,也不显式利用其零空间。其基本概念(隐含于意动理论中)是将关注点从“原始运动”转向“原始力场”:这意味着,当大脑被要求完成协调身体多个自由度以“推动”末端执行器到达指定目标这一病态任务时,它可以转而想象“拉动”末端执行器至目标,然后让身体随之被动响应——即整个运动链将被动屈服于该拉动力场,从而生成冗余自由度的协调旋转模式。这相当于利用雅可比矩阵的转置,将定义于低维任务空间的拉动力场映射为作用于高维关节空间的等效扭矩场。“被动性”规划范式通过一个柔顺矩阵进行调制,该矩阵将扭矩场映射为关节增量旋转,再通过同一雅可比矩阵映射为末端执行器的增量运动——根据意动理论,末端执行器被一个吸引力场吸引至目标。
PMP的吸引动力学可与附加模块的排斥动力学相结合,以表达几何或结构约束,如不同自由度的有限运动范围(RoM),或双足稳定性约束(即身体质心在支撑面上的位置范围)。这些约束可在线生成排斥扭矩场,并与吸引力场叠加,形成协调的协同过程,隐式利用零空间权衡不同模块之间的竞争性需求。本文进一步扩展了PMP对运动冗余的处理方法,引入了与多种动力学约束相关的柔顺矩阵自适应机制,这些约束涉及不同执行器的扭矩需求。
2. 方法
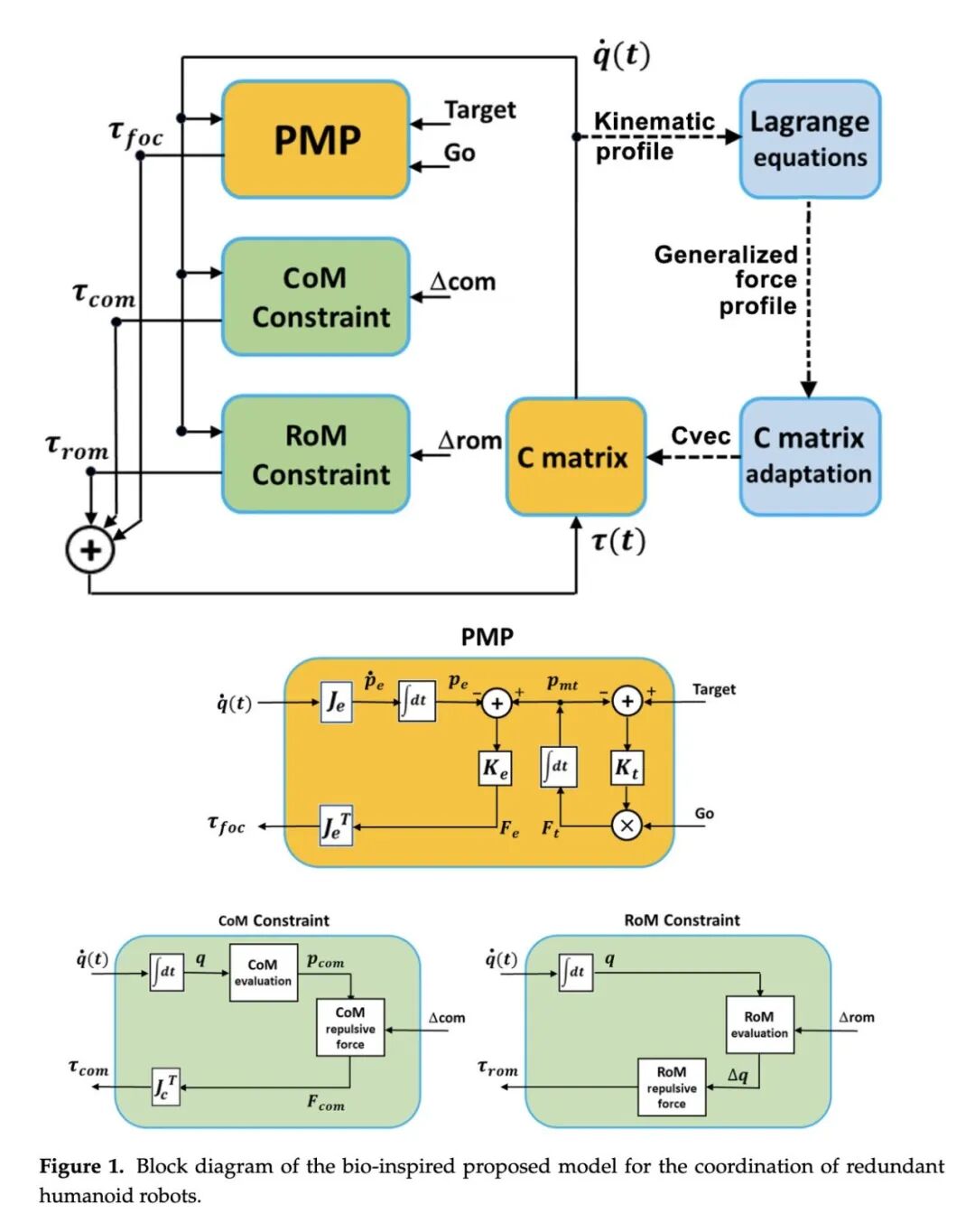
图1展示了所提出的全身机器人冗余自由度协调模型。上图是一个围绕PMP(被动运动范式)模块构建的通用框图,该模块实现了意动理论,并与两个并行模块共同作用,用于在模型仿真过程中在线满足几何与运动学约束,以驱动全身协同形成过程:(a) 用于站立机器人姿势稳定性的质心(CoM, Center of Mass)约束,即要求质心投影必须保持在双脚支撑区域的凸包内部;(b) 用于身体模型结构完整性的运动范围(RoM, Range of Motion)约束,即要求每个自由度的旋转角度必须保持在各自关节的运动范围之内。此外,还可集成其他模块,以表达特定的姿势约束。
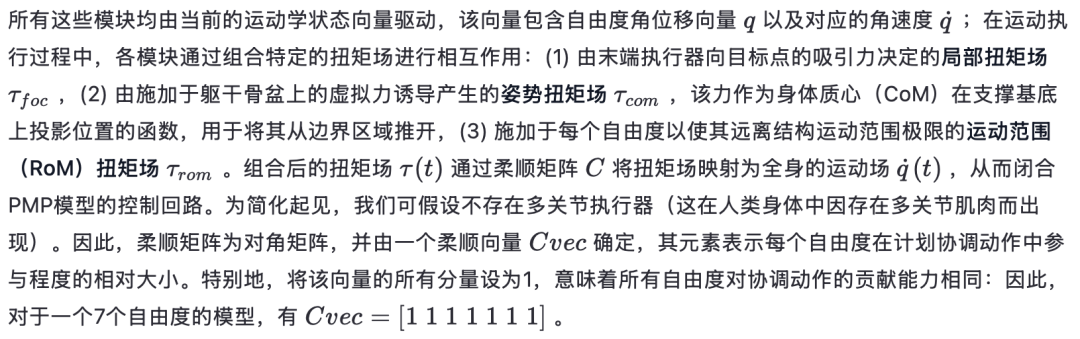
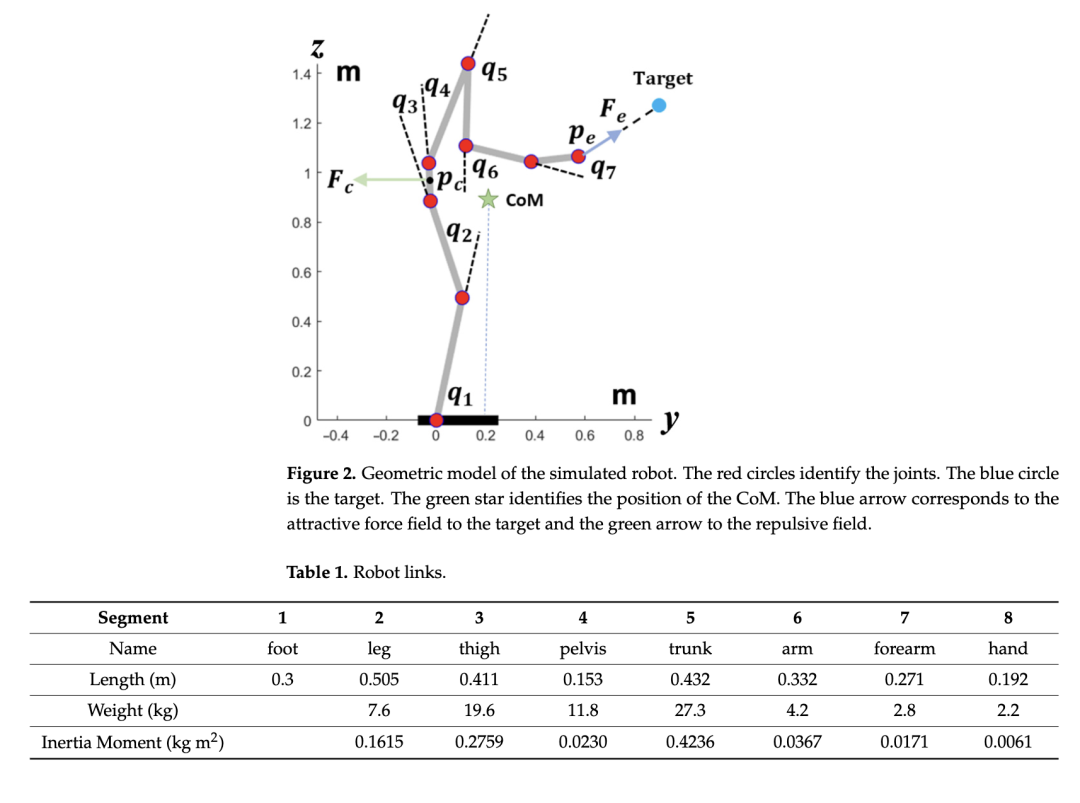
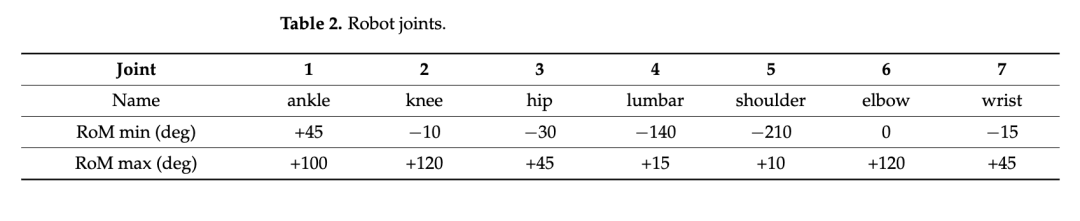
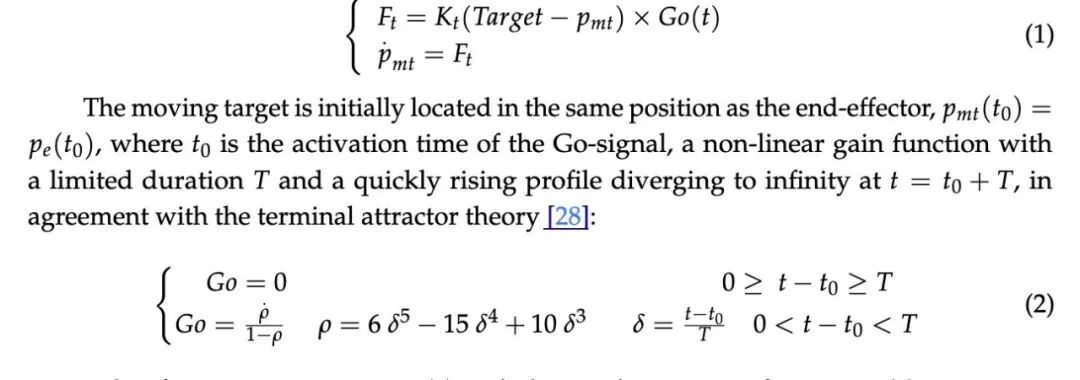
机器人身体模型是一个单平面运动学链,包含八个连杆和七个关节,如图2所示。通过为 Cvec分配不同的模式,可以获得不同的运动学模式。然而,所有这些运动均共享末端执行器相同的时空不变特征,包括轨迹和速度曲线。同时,质心在支撑基底上的投影振荡始终处于安全裕度范围内,且每个自由度的振荡也保持在其相应的运动范围(RoM)之内。该模型中的这种运动学不变性等价于在运动学结构的零空间中通过某种路径规划,在上述三种不同运动学要求之间实现权衡。通常来说,零空间的维度越高,越容易找到良好的折衷方案。例如,下一节报告的仿真结果涉及一个具有7个自由度、二维任务空间的平面机器人:这意味着零空间是5维的,为满足约束条件提供了较大的操作空间。此外,尽管上述所展示的协调范式允许在线同时满足多个几何/运动学要求,但也可以利用 Cvec参数向量的调节来应对额外的动力学约束。特别是,图1的示意图与该向量的调制方式相关,以限制给定动作计划中每个自由度的扭矩需求。例如,仿真实验展示了最小化最差执行器峰值扭矩的适应过程。为简化起见,机器人模型为平面结构,包含七个关节和八个相应的连杆(参见图2):其几何与结构参数列于表1和表2中。
现在,让我们详细描述在冗余机器人协同形成过程中所使用的各个模块。
2.1. PMP 模块 PMP 模块激活一个力场,将运动中的目标点 pmt 吸引至指定的目标位置 Target:
简而言之,将方程(1)与方程(2)中的非线性增益相结合,可为运动目标生成一条直线轨迹,该轨迹在起始后时间 T 到达指定目标点,无论初始距离如何,并具有钟形速度曲线,从而满足意动理论的逻辑以及生物运动的平滑性要求。图2中PMP模块的结构表明,在上述运动目标生成的同时,机器人末端执行器(通过积分直接运动学方程得到)
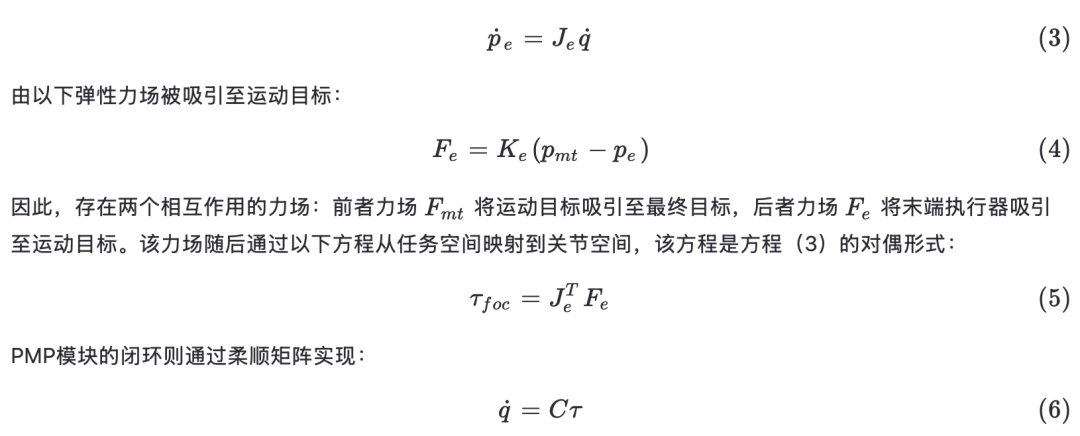
总之,PMP模块中的两个相互作用的力场分别生成了运动目标点和末端执行器的两条轨迹,通常情况下这两条轨迹几乎重合,除非质心(CoM)约束模块和/或运动范围(RoM)约束模块在零空间中引入某些偏差以满足相应的约束条件。
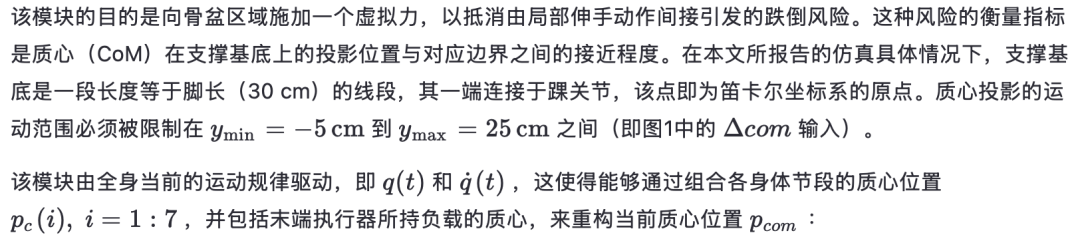
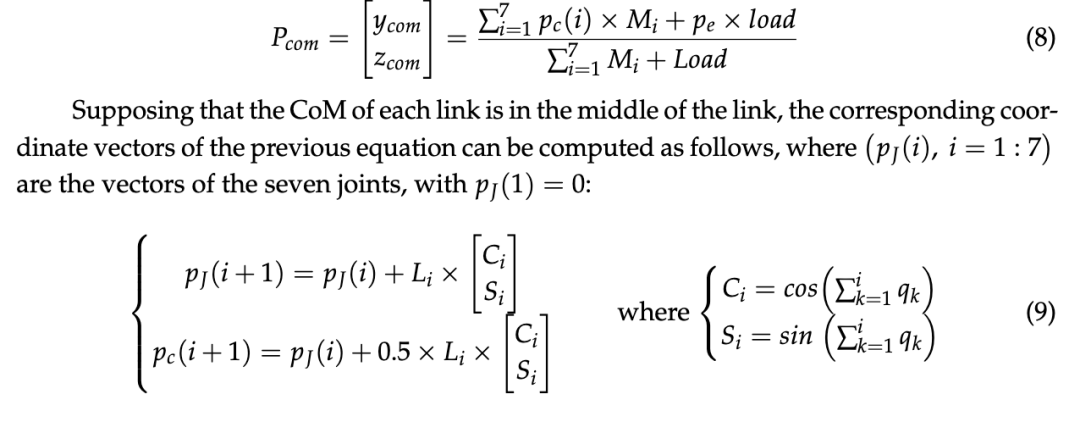
2.2. 质心(CoM)约束模块


2.3. 运动范围(RoM)约束模块



2.4. C矩阵自适应模块
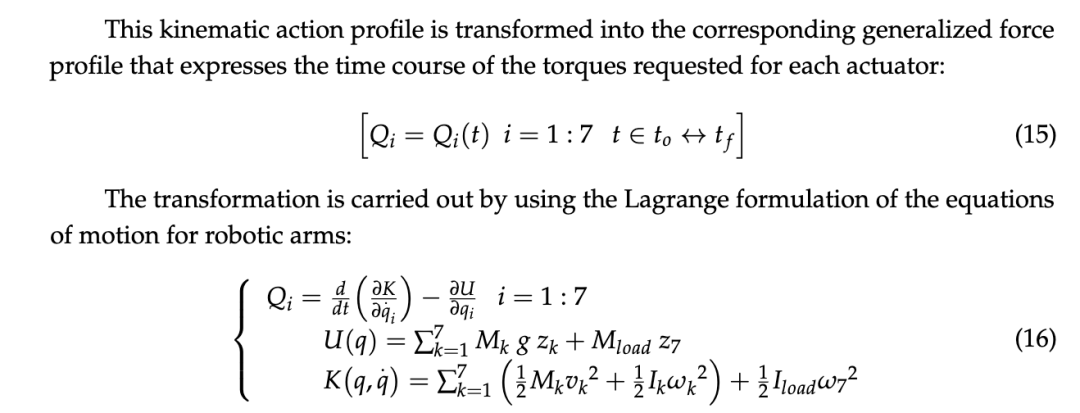
通过结合上述三个模块所生成的扭矩场,并通过柔顺矩阵将扭矩场映射为运动场,该模型能够实时协调冗余自由度,即时选择满足所有要求的零空间路径,即在线实现,同时保持相同的时空结构。此外,还可将其他模块集成到该架构中,以表达生成协同动作的附加约束条件;这些约束可以是作用于运动学状态瞬时值的在线约束,也可以是旨在调节柔顺矩阵以影响整体生成动作特征的离线约束。特别是,本仿真研究中实现的离线模块体现的是一种动力学约束,而非运动学约束,正如前述两个模块一样。具体而言,该动力学约束与机器人执行器的扭矩需求相关,针对一组运动学等效的协调动作。
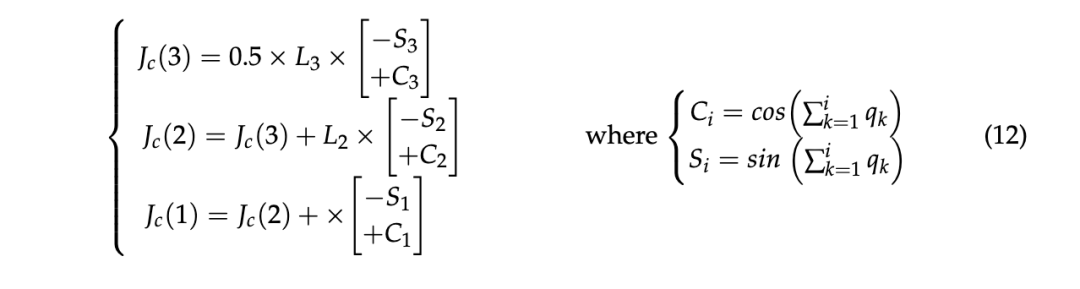
如图所示,规划的协调动作的以下运动学动作剖面被保存下来:


- 结果
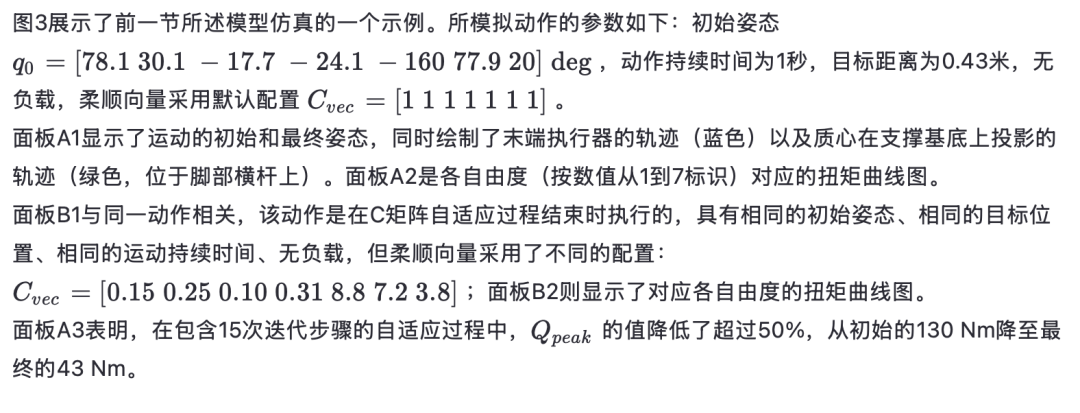
图B3展示了顺应性向量Cvec的初始和最终配置,其中蓝色标记表示优化过程开始时的状态,红色标记表示优化结束时的状态;此外,图C绘制了与初始Cvec(蓝色)和最终适应后的Cvec(红色)相关的关节旋转模式随时间的变化曲线。通过比较这些旋转模式及其对应的力矩向量(图A2与图B2),令人惊讶地发现,运动学上的微小调整即可显著改善动力学性能,使峰值力矩降低超过50%。此外值得注意的是,该适应过程保持了末端执行器运动学的不变性,包括速度曲线,并且在两种情况下均满足关节活动范围(RoM)约束和质心(CoM)约束。
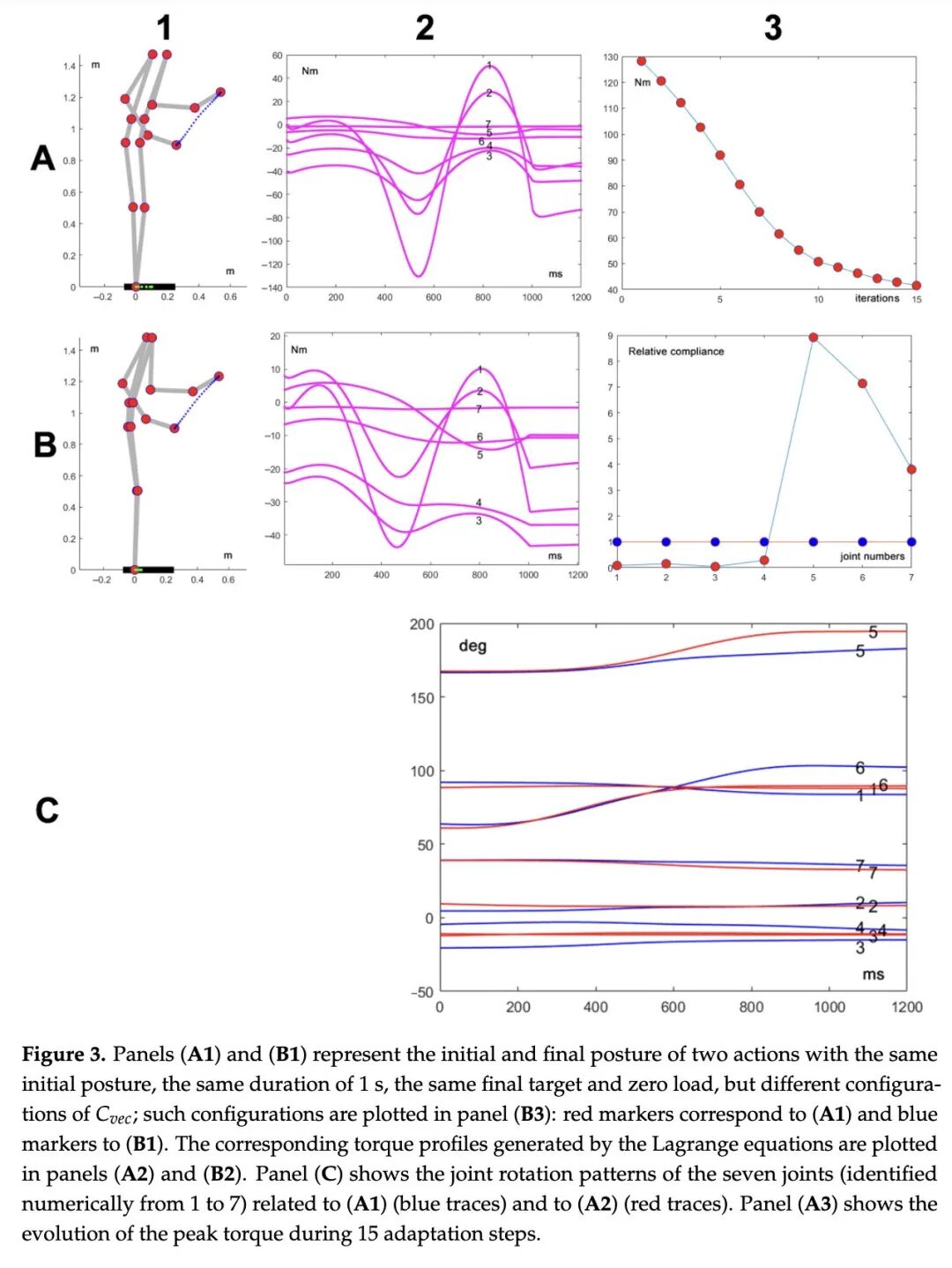
图4展示了在保持初始姿势、运动持续时间(1秒)和无负载条件下,改变运动方向所产生的效果。在所有情况下,适应过程均显著降低了峰值力矩,且相应的优化Cvec曲线均以肩关节为主要自由度,同时保持上肢自由度水平高于下肢。该图还显示,无论Cvec曲线如何,某些运动方向对运动学协调的精度更具挑战性,这体现为末端执行器偏离直线路径的程度。
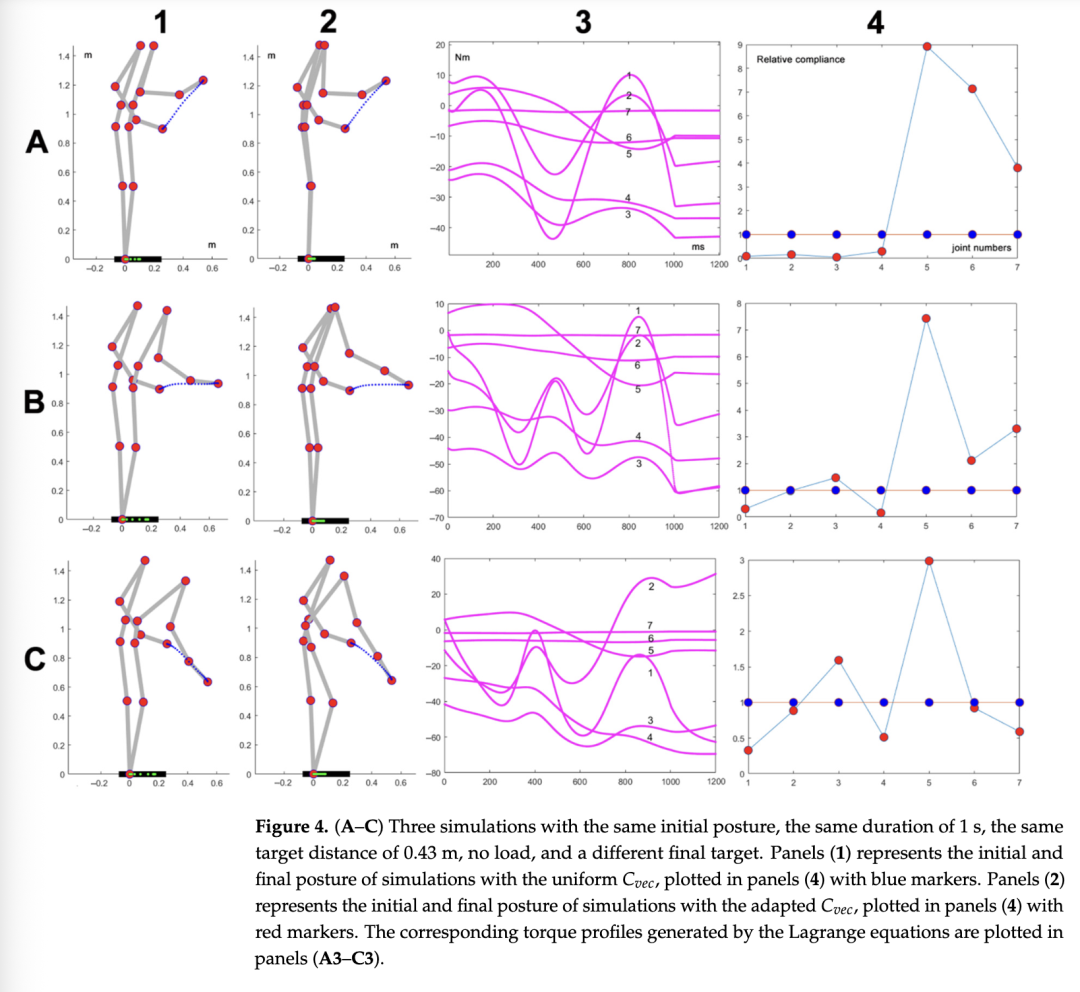
图5展示了在保持相同运动方向、距离(0.43米)和持续时间(1秒)的条件下,改变负载所产生的效果:图A中负载为0,图B中为20公斤,图C中为40公斤。在所有情况下,适应过程均显著降低了峰值力矩,且相应的优化Cvec曲线随着负载增加,将主要自由度从身体上部逐渐转移到下部。
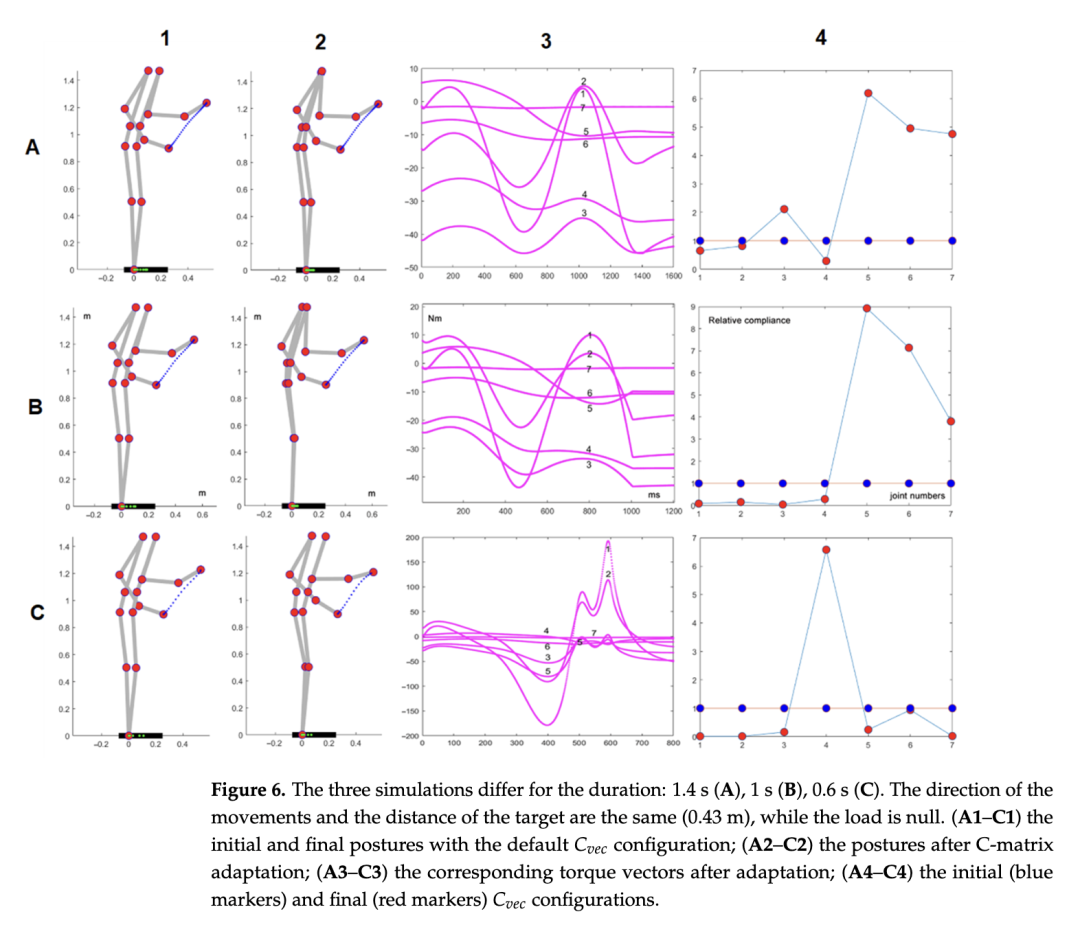
图6展示了运动速度对不同持续时间(1.4秒、1秒、0.6秒)的影响。在所有情况下,适应过程均显著降低了峰值力矩;对于慢速或极慢速运动,优化后的Cvec曲线非常相似,所需的广义力矩亦然。第三次模拟(持续时间为0.6秒)略有不同,因为此时拉格朗日函数中的动能项相对于势能项占据了主导地位。
所报告的模拟展示了在相似运动学协调模式下,力矩需求的可变性。
- 讨论 通常认为,运动冗余问题是运动控制的核心问题。正如引言中所述,一个世纪前尼古拉·伯恩斯坦(Nikolai Bernstein)[9] 提出的早期解决方案是“消除冗余自由度”,其假设是:一旦识别出冗余/非必要的自由度,神经控制器便可直接专注于关键/非冗余的自由度。然而,从观察多关节熟练行为以及根据“未受控流形”(Uncontrolled Manifold, UCM)概念[29] 尝试将多自由度空间划分为受控与未受控流形的双重角度来看,这一过程在一般情况下远非简单。相反的过程——即如何通过将控制集中于一个精心识别的流形、同时“放任”UCM,从而对构型空间进行划分以生成有目的的协调动作——则要复杂得多,并让我们想起仅凭正向运动学知识求解逆运动学时所面临的困难。无论如何,UCM概念起源于神经生物学,与工业机器人领域所采用的“零空间”概念非常相似,而零空间概念正是许多逆解算法的基础。
传统上,工业机器人对逆运动学的处理方法被表述为一种优化方法,在给定任务运动学描述的前提下,基于各种代价函数进行求解;其结果是追求一种复杂的计算过程,而该过程的速度与鲁棒性会随着冗余度的增加而显著下降。
正因为如此,通过显式数学优化方法解决运动冗余问题所引发的“痛苦/煎熬”,已被强调“运动丰裕性之愉悦”(bliss of motor abundance)[30] 的观点所挑战,该观点基于对自由度数量的一种假设:越多越好。例如,实验证据支持如下假说:大量自由度的存在可提升人类同时处理多个约束条件的能力,且各约束间干扰最小化[31],从而增强动作表现的灵活性。
运动丰裕性原理的理论基础,某种程度上与如下观点相关:高维运动控制的动力学只能在一种“生态学”框架下理解——该框架将大脑、身体与环境纳入同一动力学过程,整合神经生物学、生物力学与物理过程。尤其,这一思想被“平衡点假说”所捕捉,该假说强调姿势与运动之间的紧密关系[32–34],并提出:大脑并不以精细方式直接控制姿势,而是由力场驱动,即姿势是肌肉力与环境力之间达到平衡的“生物物理结果”;“运动”则被视为一种对称性破缺现象,即从一个平衡态过渡到另一个平衡态。
人体丰富/冗余自由度在产生有目的动作过程中的组织/重组,亦可依据“最小交互原则”[35,36] 加以描述,即诸如神经肌肉系统等复杂系统具有一种自然倾向:减少为达成特定目标或维持特定状态所调用的子系统或组件之间的交互数量与强度。例如,这种交互简约性可通过阈值机制实现——只有当偏离平均预期协同模式的程度显著干扰任务目标时,系统才予以校正。
同时,我们不应将上述概括性原理(如平衡点假说)的应用范围局限于严格的运动控制领域,而应将其扩展至具身运动认知(embodied motor cognition)。这是因为,不同形式的“认知模拟理论”[37–41] 明确表明,该理论的核心部分正是对动作的模拟,而这种模拟由与实际运动执行和感知通常相同的神经机制完成。关键在于,动作的心理模拟是前瞻(prospection)的基本组成部分。它建立在动作心理模拟的基础之上,用以评估动作潜在的未来感觉运动效应、环境效应与社会效应,从而支持知情决策过程[42–44]。
本研究提出的仿生协调人形机器人运动冗余/丰裕性的模型,与平衡点假说密切相关,因为起源于EPH扩展的PMP(姿势-运动优先模型)本质上具有“无运动的肌肉协同与动作”[27] 的特征:这意味着,从意动(ideomotor)观点来看,隐蔽/想象的动作与外显/执行的动作完全等价,唯一的区别在于中枢模式发生器(central pattern generators)是否被特定激活。此外,与运动学丰裕性原理一致,PMP并不需要高强度计算,而是由内源性或外源性力场驱动的趋向平衡的动力学所表征。
特别地,PMP模块的主循环可通过耦合神经网络实现,这些网络经由自监督训练,能够模拟雅可比矩阵及其转置矩阵[27]。与此同时,通过全维空间中力矩场的相互作用来整合多重约束,是最直接利用运动丰裕性原理的方式。此外,用于实现质心约束(CoM-constraint)与关节活动范围约束(RoM-constraint)的非线性排斥场,其设计初衷即契合“最小交互原则”:所选择的非线性轮廓等价于一种阈值激活算法,旨在降低约束满足模块中不同组件之间发生冲突的可能性。
在运动神经生物学中,运动控制与运动认知是两个明确区分但又紧密关联的主题。这一概念同样适用于仿生方法设计人形机器人运动认知架构的情形。这也解释了为何本文提出的协同形成模型明确聚焦于运动认知,而不能被视为专门针对特定控制问题(如系统刚度调节或抗振动能力等与执行器及其相关微控制器固有特性直接相关的问题)所设计的专用控制器。例如,本文模型中定义的顺应性向量,必须作为冗余协同形成过程最优定义的关键要素,而非用于控制系统刚度的元件。沿着同样的逻辑,我们亦可考虑能量效率问题。在神经生物学中,对“生物运动”的分析揭示了人类动作具有能量效率,这主要由其整体平滑性[14](即动作的运动学组织)所决定。类似的问题也在机器人运动领域得到研究[15],证明机器人运动的平滑性可带来显著的能量效率提升。本文提出的协同形成模型是仿生的,并基于所生成协同模式的整体平滑性,因此从运动学角度而言具有能量效率。同时,我们亦可假设,除了运动学层面的能量效率成分外,还存在依赖于执行器设计与微控制的能量效率成分,但这已超出本研究的关注范围。
本文提出的用于冗余人形机器人协调的模型,对系统整体刚度或抗振动及机械扰动能力并无直接影响,尽管顺应性向量在塑造运动学模式(将规划动作分配至身体模型所有自由度)中起着关键作用。该向量的各个元素表达了某一自由度对“意动扰动”(即意图以特定速度曲线朝特定方向运动)的抵抗程度。另一方面,系统刚度是各自由度执行器所配备微控制器(包括可变刚度执行器[45])的函数。此外,本文所描述的运动认知网络可与运动控制机电系统集成,以提前预判末端执行器与环境或待操作物体/工具之间的物理交互,并结合特定的刚度椭球体进行控制[25]。
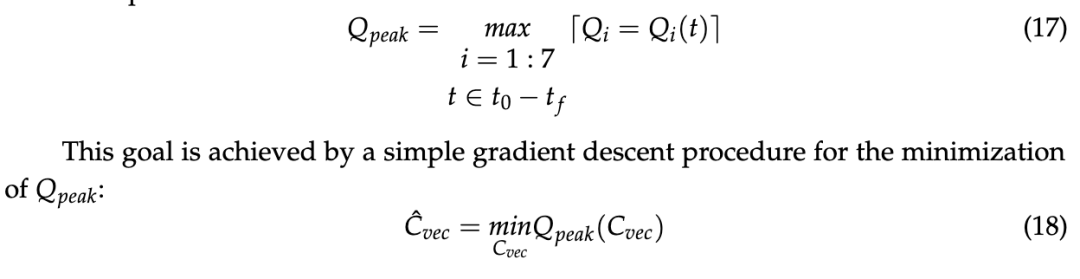
附录 A. 顺应性向量的优化
如方法部分所述,顺应性向量 Cvec 的优化是通过梯度下降法实现的,目标是最小化 Qpeak,给定末端执行器的具体运动学轨迹,即末端执行器的轨迹及其对应的速度曲线:[p_e(t), t ∈ t₀ → t_f]。这种运动学轨迹与顺应性向量的选择无关,而顺应性向量则对广义力矩曲线 [Qi(t), i = 1:7, t ∈ t₀ → t_f] 有显著影响:Qpeak 是力矩曲线不均匀程度的一个指标。对 Q_peak 的梯度下降最小化过程,是一个基于图1所示模型的仿真循环,初始时顺应性向量 Cvec 的默认值为 [1 1 1 1 1 1 1]。本研究中实现的梯度下降方法非常简单。在每次循环步骤中,对完整动力学模型进行两次仿真;这些仿真分别对应于 Cvec 的七个元素中的某一个,其值被增加或减少 10%。仿真产生两种版本的运动学轨迹及其对应的力矩曲线:选择使 Qpeak 值更低的 Cvec 修改方案,并保留该修改结果,然后重复此过程,直到满足终止条件,例如 Qpeak 减少 1%。
原文链接:https://www.mdpi.com/2076-0825/14/7/354
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-09-11,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号