4轴SCARA与6轴协作机器人:工程对比


REF:棚架葡萄高速切接采收机器人设计与试验
01
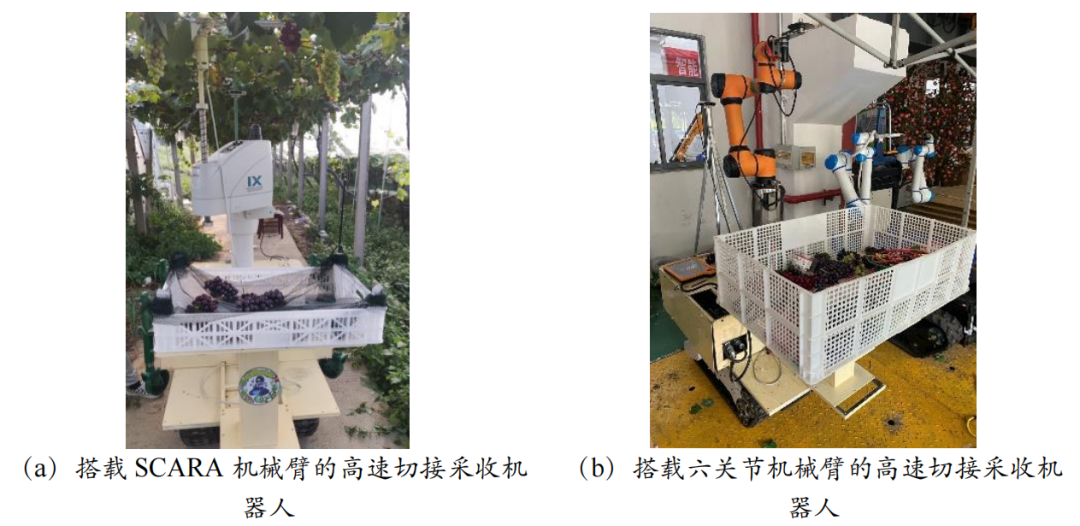
方案选型
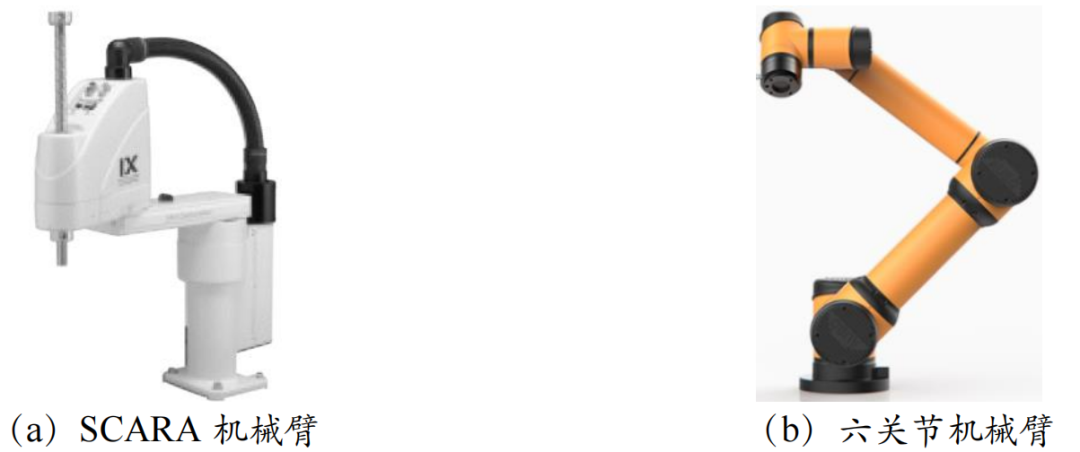
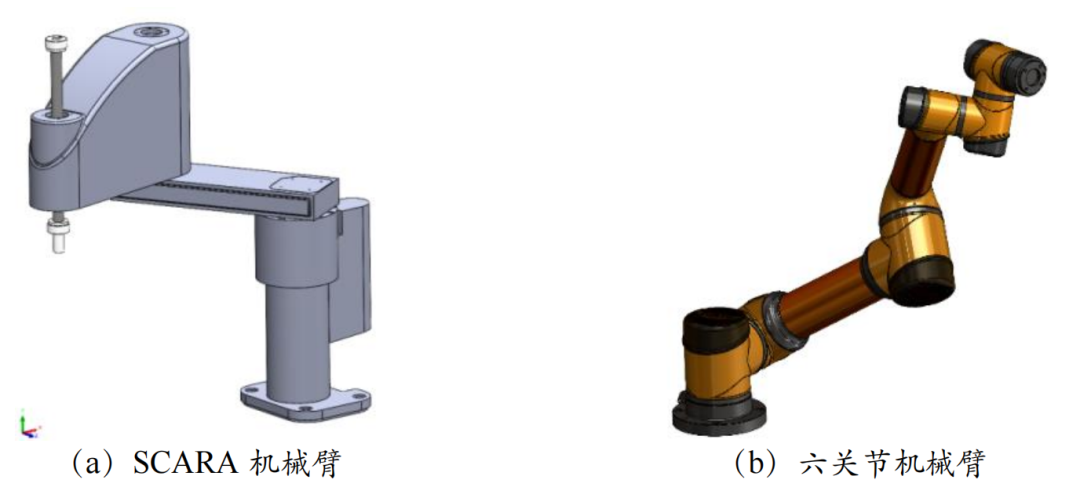
SCARA 机械臂和六关节机械臂,SCARA 型号为日本IAI 公司 IX NNN7020 工业机器人,六关节机械臂为遨博的 i5 协作机器人,其实物及模型如下:
02
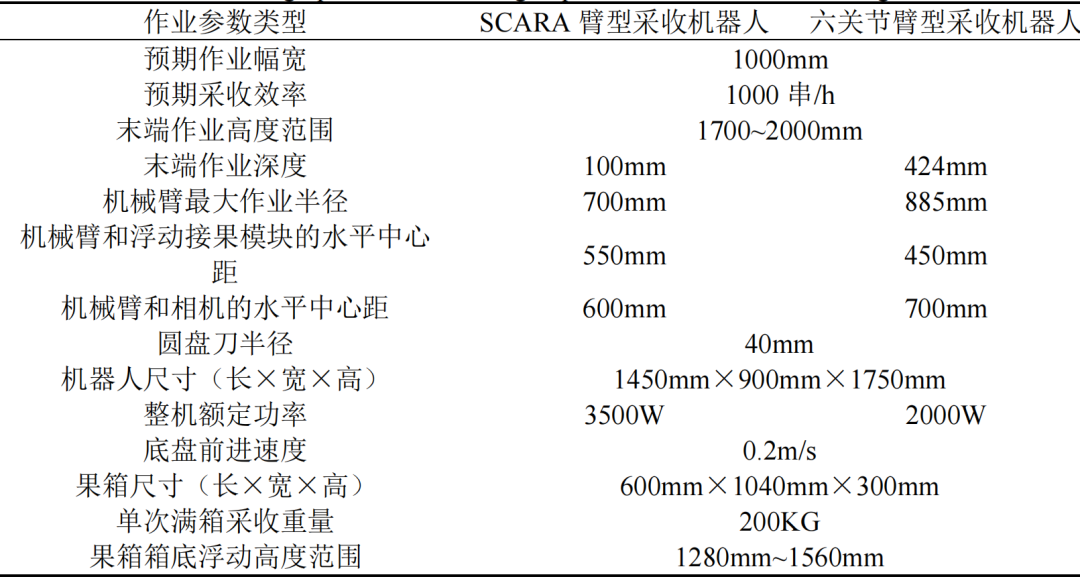
参数对比
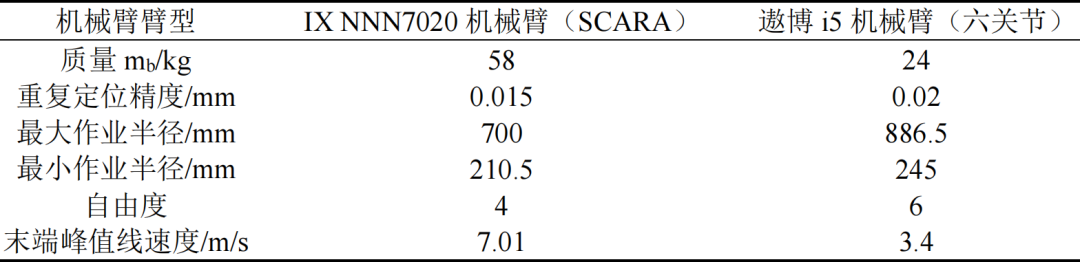
机械臂的基础规格参数
在高速运动过程中,机械臂产生的水平横向惯性力矩会使机器人相对重心产生侧向倾覆力矩,导致小型机身难以保持平衡,降低采摘定位精度,并增加倾覆风险,两款机械臂的转动惯量如下:
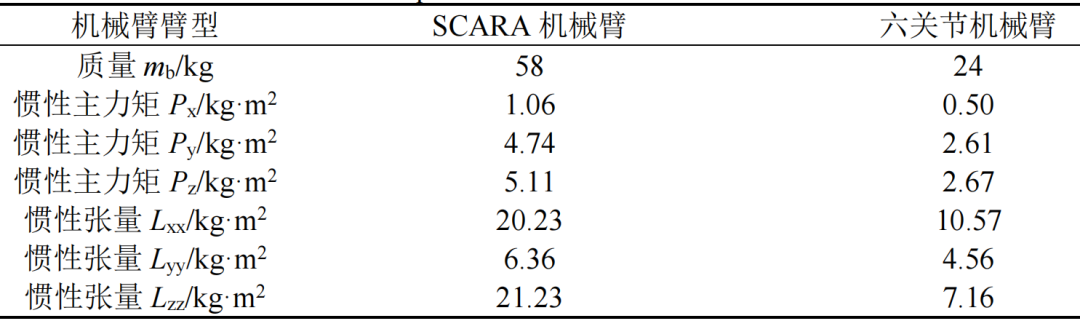
上表看出SCARA 机械臂在各个方向的惯性主力矩和惯性张量均高于 i5 型遨博六关节机械臂,因此 i5 型遨博六关节机械臂能够更加稳定地运行
03
运动学对比
根据机械臂的 D-H 参数建立相邻连杆空间位姿模型,两种臂型方案中机械臂末端执行器的 D-H 空间坐标系模型如图
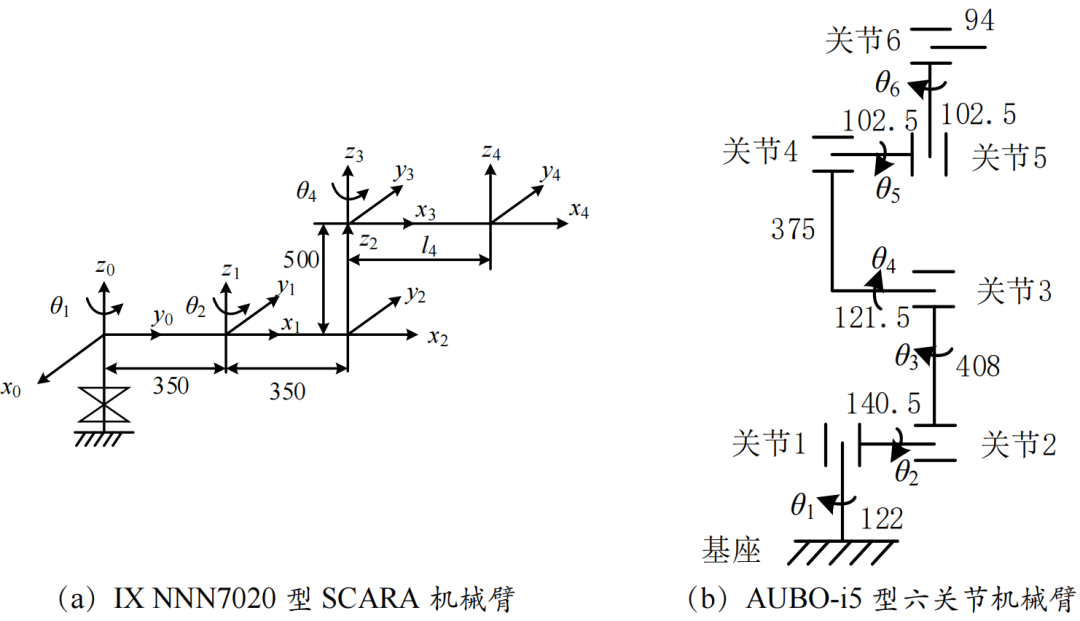
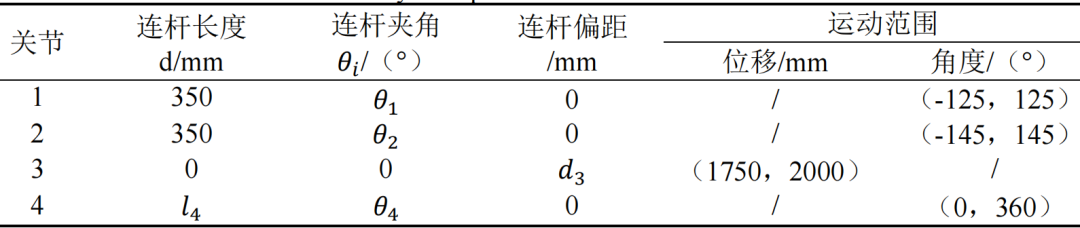
SCARA 机械臂只有四个自由度,包括大臂、小臂的回转运动、末端执行器绕 Z 轴旋转和沿 Z 轴上下运动D-H 连杆参数如下
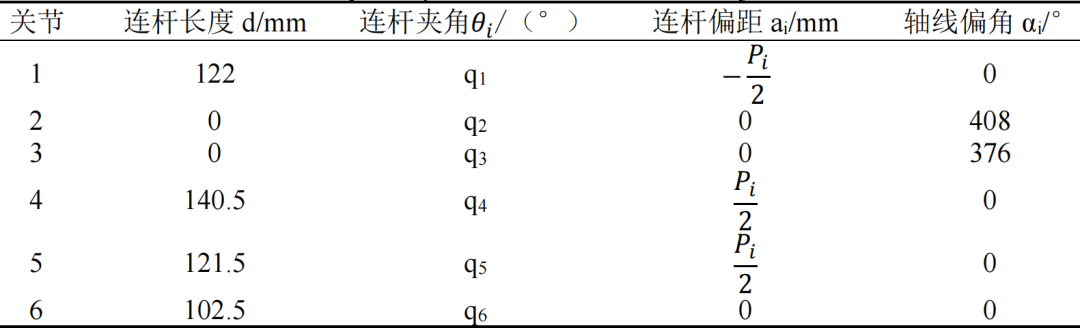
六关节机械臂拥有完整的六个自由度,且相比 SCARA 机械臂运动位姿更加灵活,六关节机械臂的手 - 臂 D-H 连杆参数如下
04
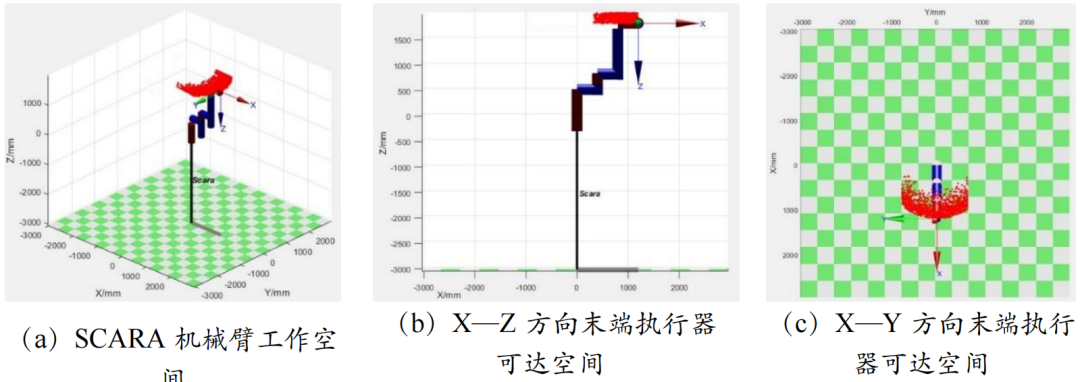
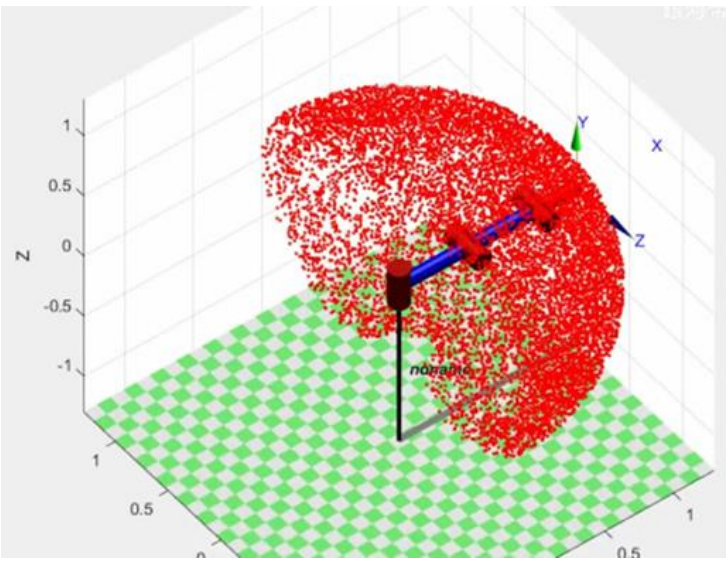
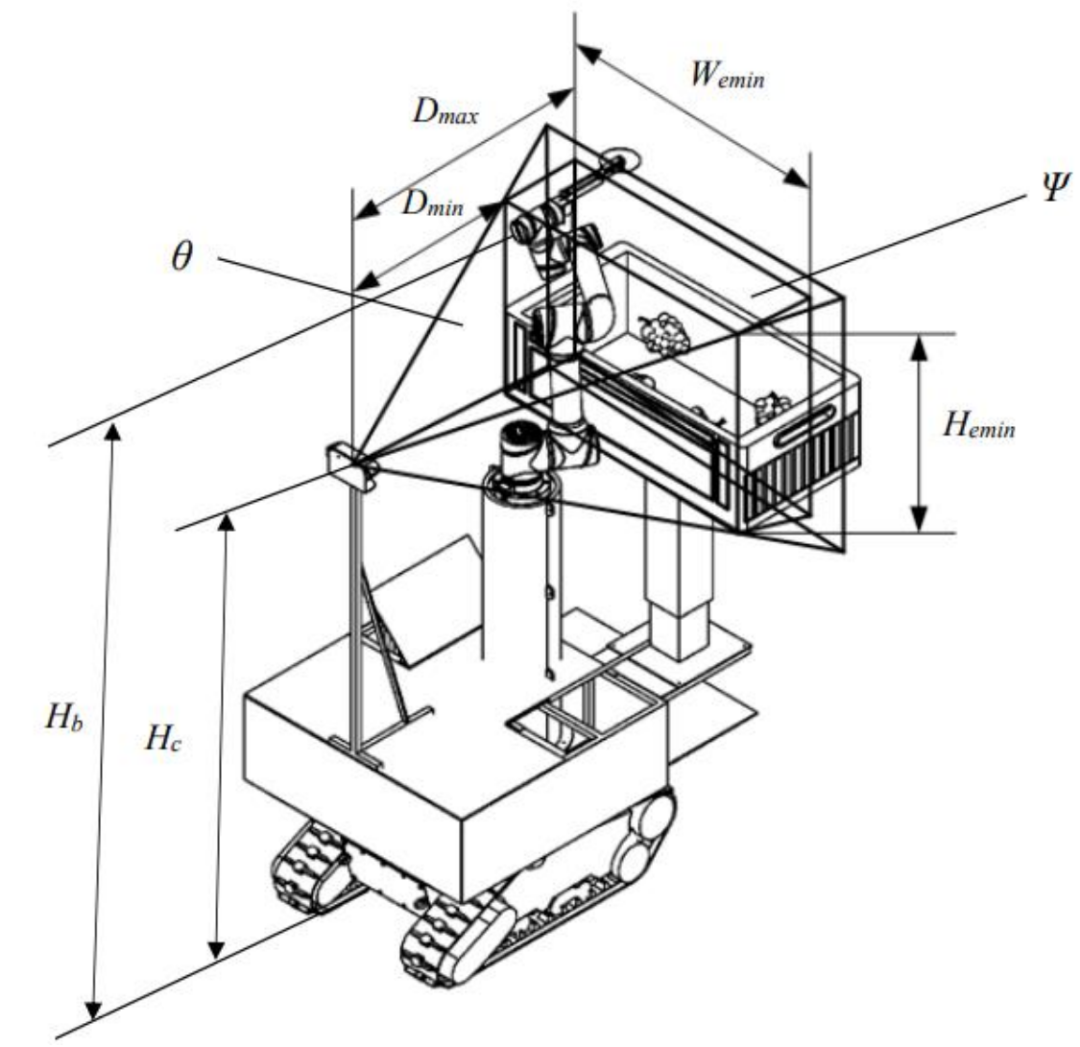
空间可达区域对比
使用蒙特卡洛法对两种备选臂型方案的手 - 臂工作空间进行仿真验证,末端能够到达的所有空间位置点集合将构成手 - 臂的工作空间。
05
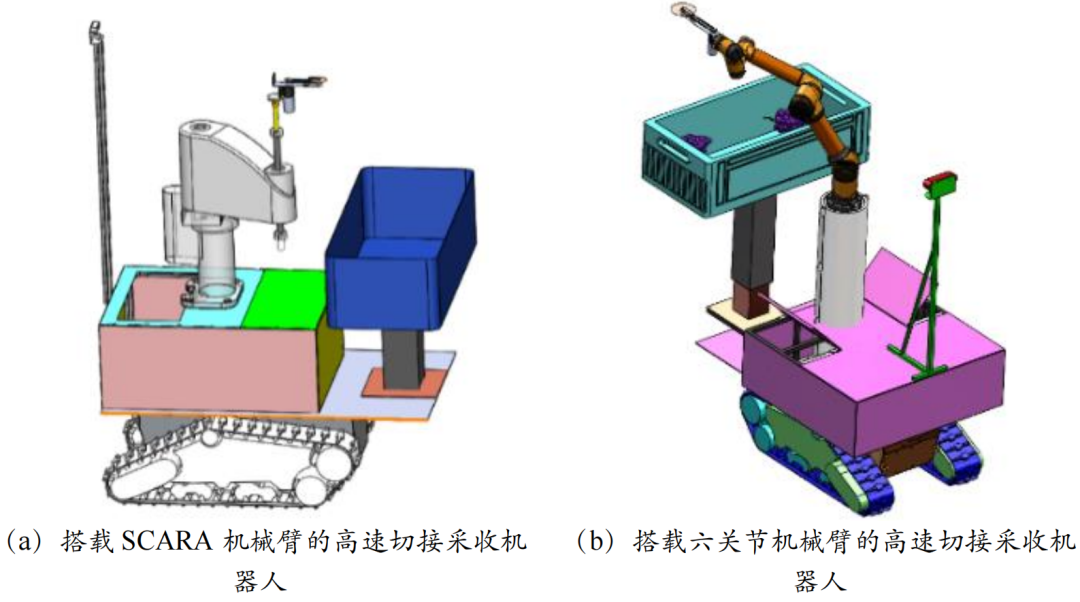
复合机器人构建
基于选定的 SCARA 机械臂和六关节机械臂分别建立复合机器人的机器人及三维模型。
06
手眼标定
相机内参与相机自身特性相关,如焦距、像素大小等。由于每台 相机镜片存在细微差别,成像畸变也不同,通过棋盘格标定板固定在机械臂末端,相机拍摄不同姿态下的标定板图片,对每幅图像进行角点检测和提取,得到所有角点的像素坐标。利用这些坐标,通过 OpenCV 工具的内参标定函数“ calibrateCamera ”测得内参矩阵。

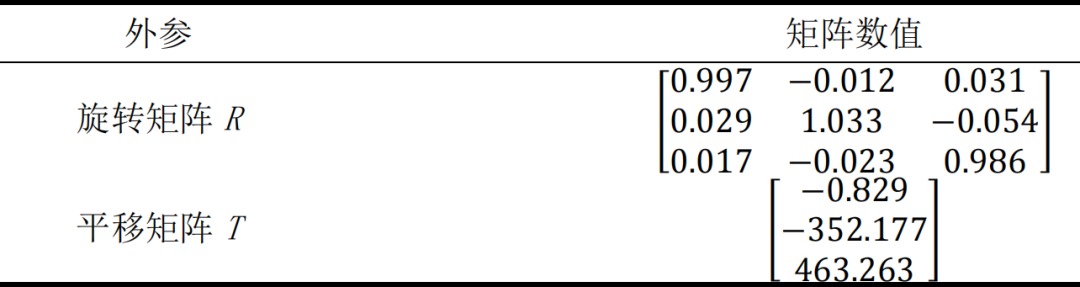
外参矩阵通过旋转矩阵和平移矩阵,描述了将采摘点从世界坐标系转换到相机坐标系,与固定的内参矩阵不同,外参矩阵会随着相机和机械臂位置关系的变化而改变。
同样,将标定板固定在机械臂末端,通过机械臂示教器控制,采集多组标定板图像和对应的末端位姿数据,记录末端相对于标定板的位姿信息。使用OpenCV 工具提取标定板图像上的特征点并计算对应的三维坐标,将特征点和三维坐标分别存储到两个矩阵中,使用 OpenCV 中的 “calibrateHandEye” 函数计算相机和末端执行器在机械臂基座坐标系下的手眼矩阵。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-16,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号