一种结构优化提高模态的分析过程(降低scara机械臂抖动)


REF:SCARA 型晶圆传输机器手结构设计与减振优化
01
scara机械臂本体设计
scara机械臂结构包括平面运动机构 、 升降运动机构和底座, 其中平面运动机构由机械手指 、 小臂 、 大臂 、 直驱电机组成, 升降机构由升降套筒 、 丝杠螺母以及导轨组成, 底座部分安装有伺服电机。
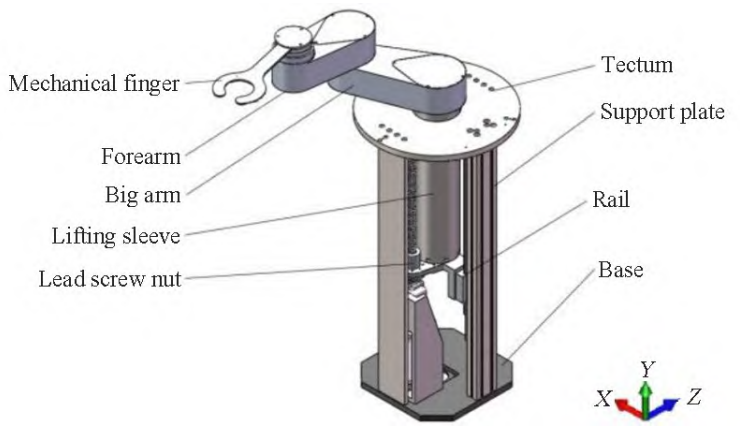
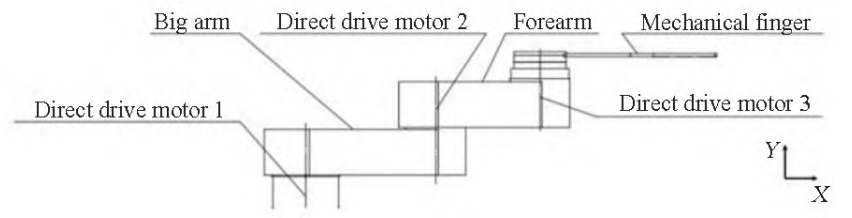
机器手总体传动包括平面传动和升降传动, 平面传动由直驱电机驱动三个旋转关节 , 升降传动由伺服电机驱动丝杠螺母实现。 平面运动机构由三个手臂和直驱电机组成 , 其中小臂 、 大臂 、 末端执行器 ( 机械吸盘手指 ) 的回转运动关节均通过直驱电机直接驱动,升降运动机构的结构原理是通过安装在底座的伺服电机驱动滚珠丝杠。
02
夹取装置模态分析
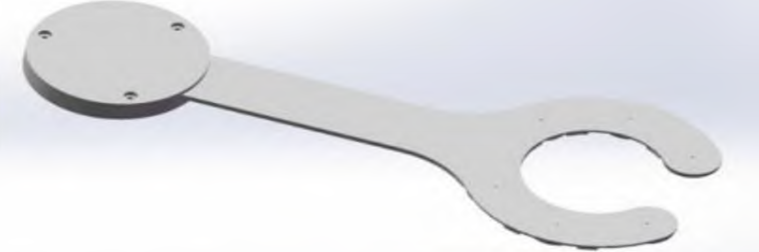
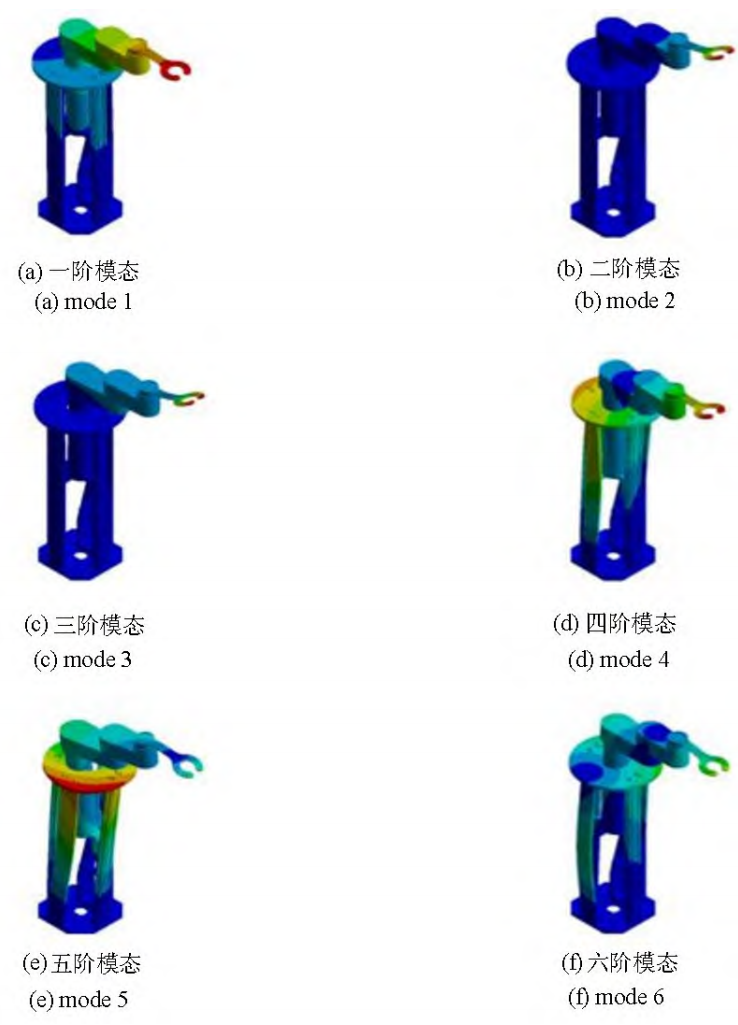
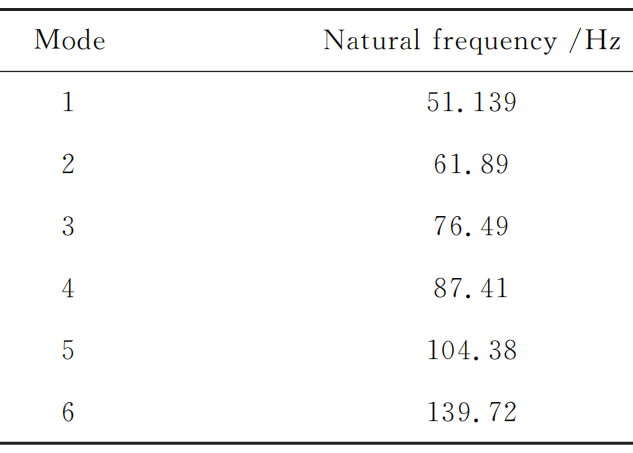
将机械 手 指 三 维 模 型 导 入 到 Ansys Workbench 中 , 为满足轻量化设计要求, 模型主要材料设置为铝合金,在机械手指的接触设置中, 由于其结构主要是通过螺栓连接固定在一起 , 在运动的过程中各零部件也没有相对运动情况 , 故其接触方式默认为Bonded 模式,对模型进行网格划分 ,单元尺寸设置为2mm, 共划分 60212 个节点 ,31046 个单元, 在手指与小臂连接处添加固定约束后 , 对其 1~6 阶模态进行求解, 最终得到前六阶模态固有频率如下所示
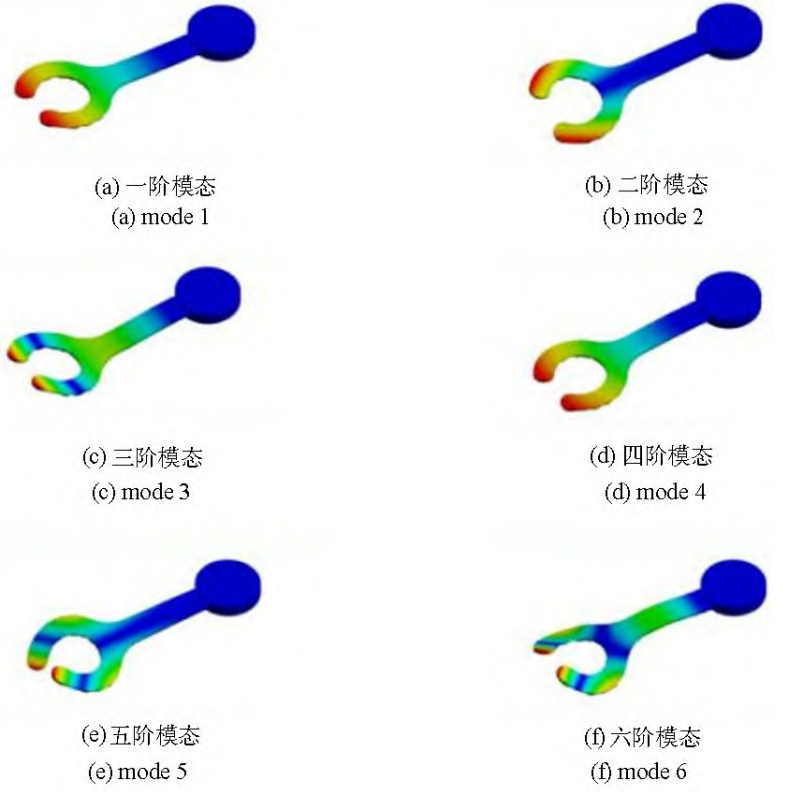
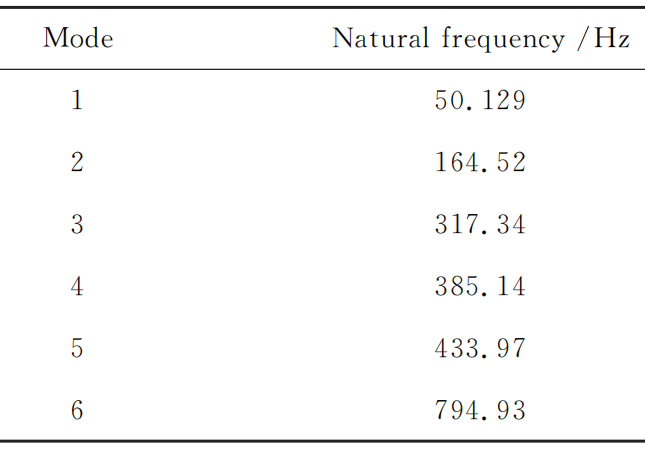
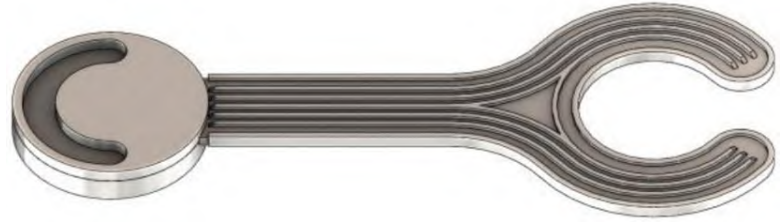
通过观察机械手指一阶模态频率及振型可知,手指一阶模态频率较低仅为50Hz,与执行器振动源频率接近,为避免共振现象产生, 通过加强筋和加宽优化的方式,增加在振型方向上的厚度,对结构进行优化,考虑到在机械手指的上端面增加厚度的同时,也会提高机械手指的质量,为了满足轻量化的要求,通过均匀轮形筋结构设计,降低质量的增幅的同时保证刚度的提升.
03
整体模态分析
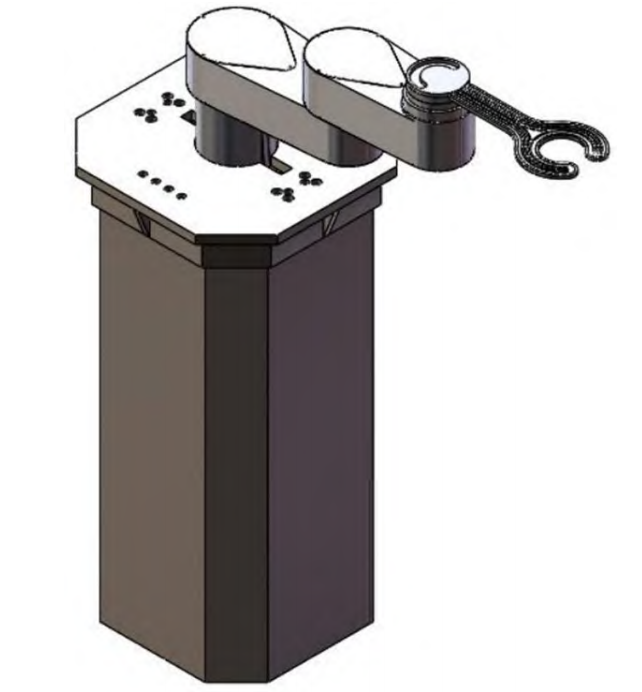
保证整体结构及运动特性的影响可忽略不计的前提下,将机器手的电机、螺栓、轴承以及细小工艺孔等零部件结构进行了简化处理,并将简化后的晶圆传输机器手导入到 AnsysWorkbench中进行分析。
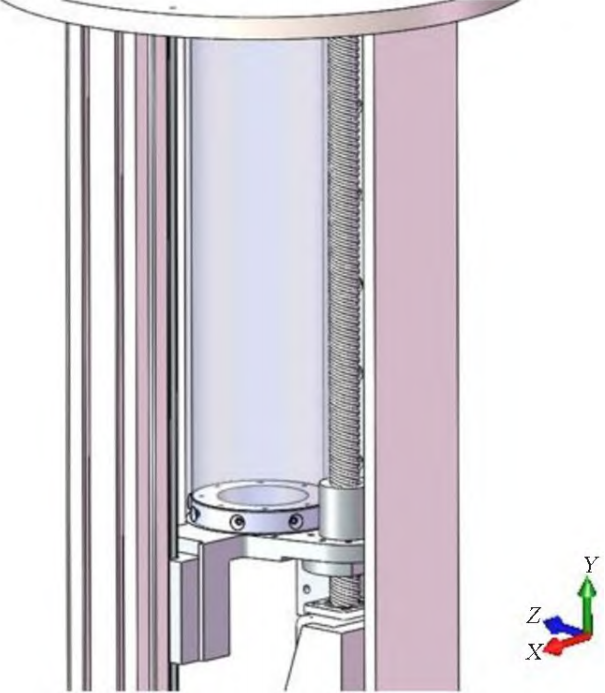
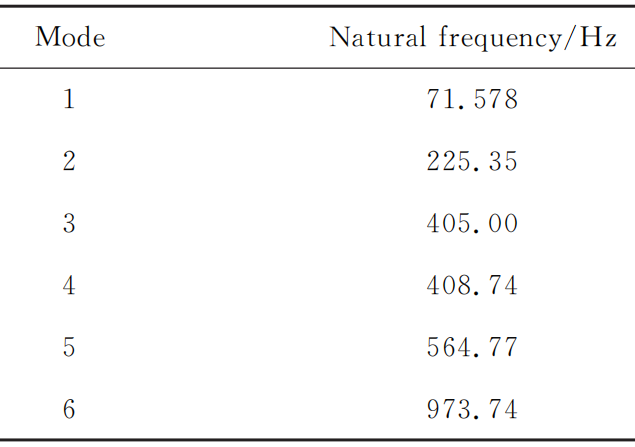
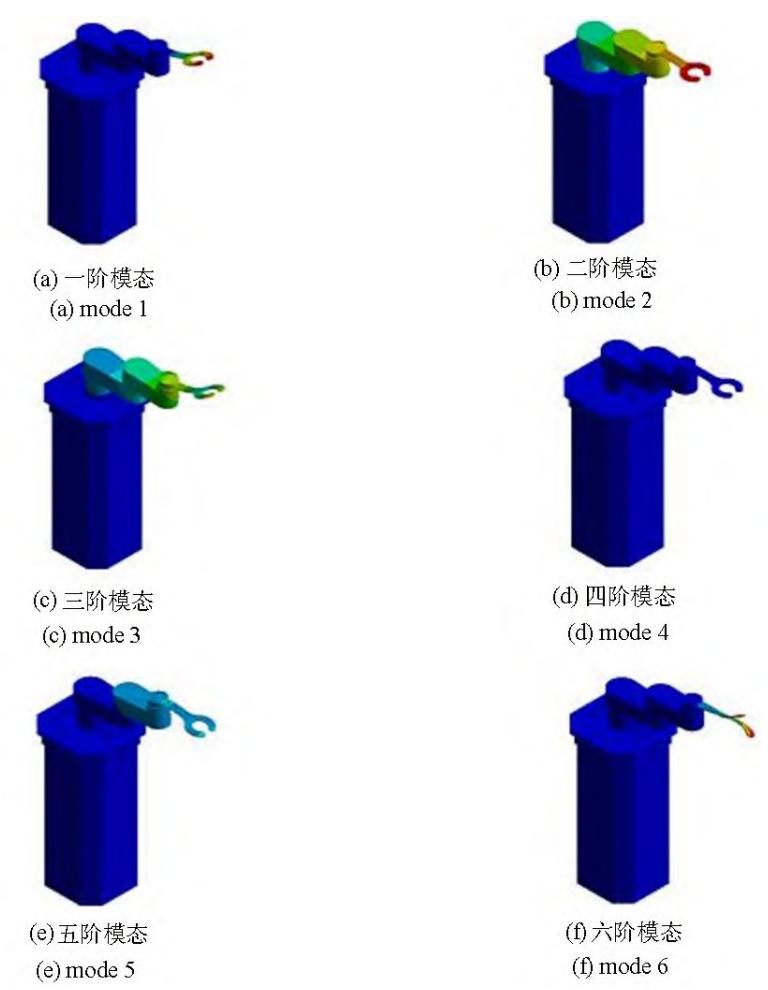
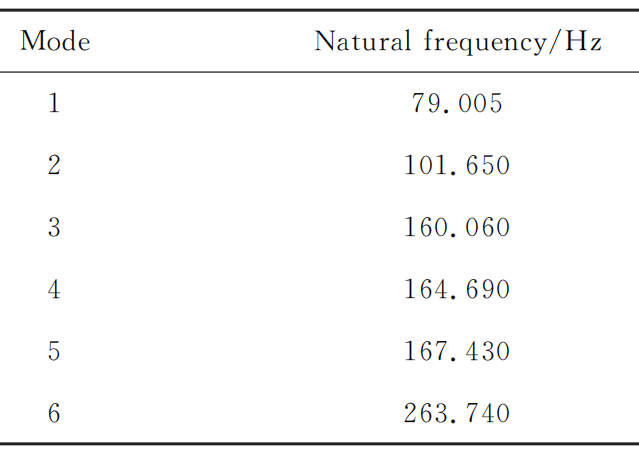
机器手的主要材料为铝合金,连接关系定义默认为 bonded,网格尺寸设置为3mm,其中节点数为1547272,单元数为769801,模态分析设置求解阶数为6阶.之后 对模型进行支撑约束 ,分别在底板底端、丝杠与电机连接支撑件下端面设置固定约束,丝杠联轴器轴段设置圆柱面约束,得到6阶模态如下:
观察振型可知,其一阶模态较低,振型为沿 X 方向的摆动,考虑可能是Z 方向的底座部分刚度较弱;二阶模态振型方向沿Y 方向,与机械手指的一阶模态振型方向一致,表明对于机械臂的二阶模态有效变形质量包含了机械手指的一阶模态变形质量。考虑到机械臂底座部分刚度较弱,引起一阶模态频率偏低以及二阶模态频率相较于机械手指的一阶模态频率偏低,对此有必要进行升降机构及底座结构优化以提高其刚度,进而提高整体的模态固有频率.为实现减振降噪的目的,可以考虑通过加强筋、增加薄弱部分厚度等方式改变结构的尺寸、改变材料或设计壳体提高整体结构固有频率避免共振。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2026-02-11,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号