智元人形机器人:从零开始完成开发环境配置


配置一个稳定、完整的开发环境,是开启人形机器人的第一步,本文旨在提供一份清晰、详尽的指南,涵盖从基础操作系统到高级仿真工具的完整配置流程。跟随以下步骤,将一步步搭建起专属于智元人形机器人的开发世界。
1. 操作系统配置
在开始安装各类开发工具之前,首先需要一个稳定可靠的操作系统作为承载一切的基础。
方案选择:你可以选择在物理计算机上直接安装,也可以使用VMware、VirtualBox等虚拟机软件创建隔离的虚拟环境。虚拟机方案能有效避免与主机系统的潜在冲突,特别适合初学者和进行多环境测试。
系统版本:推荐使用 Ubuntu 22.04 LTS,LTS(长期支持)版本能提供长达数年的稳定更新和维护,是工业界和机器人研究领域的首选。其良好的兼容性和丰富的软件库将让后续的安装工作事半功倍。
可以通过链接Ubuntu(https://www.releases.ubuntu.com),登录官网下载Ubuntu系统,官网版本有点多,如果没找到下载入口,也可以直接使用作者下载好的地址,网盘(https://pan.quark.cn/s/a252074db464)
2. 核心开发环境配置
当Ubuntu系统准备就绪后,即可着手安装机器人开发所依赖的核心工具链,包括Cmake、GCC、Eigen3、Boost、Python,下面详细展示各个模块的安装过程。
2.1 安装Cmake(构建系统管理器)
CMake是一个跨平台的自动化构建系统生成器,不直接构建软件,根据配置文件(CMakeLists.txt),为不同的底层构建工具(如Make、Ninja)生成标准化的构建文件。
安装说明: 在终端中执行以下命令,Ubuntu 22.04的默认软件源是CMake 3.22。
sudo apt update
sudo apt install cmake
cmake --version # 验证安装,应显示3.22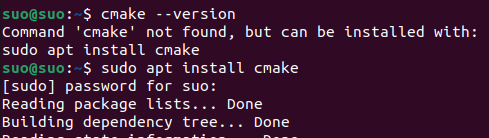
19058908fb9c7af5cd6bfb417eb93d53.png

78ea89b0dd81724b3afe230dece668f1.png
2.2 安装 GCC/G++(编译器套件)
GCC(GNU Compiler Collection)是涵盖C、C++、Fortran等语言的开源编译器套件。G++特指其中的C++编译器。它们是编译机器人底层控制代码和算法的核心工具
安装说明: Ubuntu 22.04默认已安装GCC 11.4,为确保C++编译器也已就位,可以安装 G++(包含 C/C++ 编译器)
gcc --version
sudo apt install g++ # 安装C++编译器
g++ --version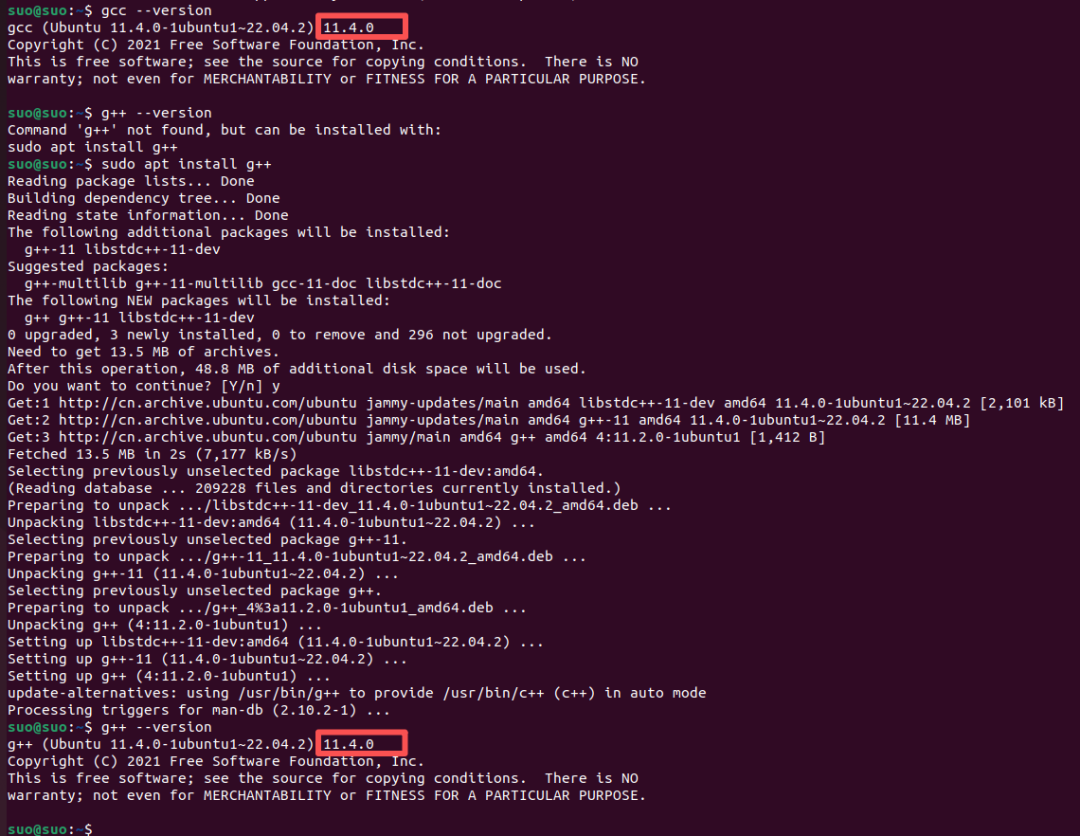
f99b88af97ca4d82b62aba6b585a99b2.png
2.3 安装 Eigen3(数学矩阵库)
Eigen是一个纯头文件实现的C++模板库,专用于线性代数、矩阵和向量运算,无需编译或链接库文件,只需包含头文件即可使用,以其运算速度快、接口优雅而应用于机器人学(如运动学、动力学计算)和计算机视觉领域。
安装说明: Ubuntu 22.04默认版本为Eigen3.4
sudo apt install libeigen3-dev
#Eigen本身没有可执行文件,可通过头文件的宏定义确认版本
cat /usr/include/eigen3/Eigen/src/Core/util/Macros.h | grep -E "
#define
EIGEN_(VERSION_|MAJOR|MINOR|PATCH)"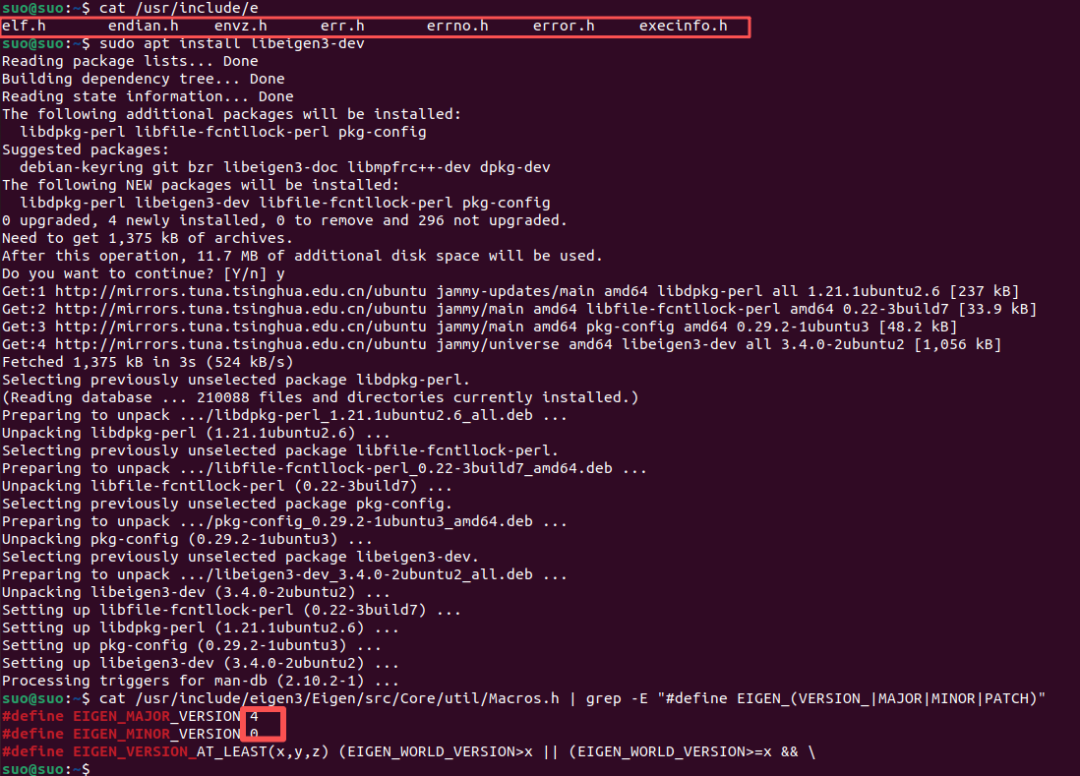
0fa3039afec57ef25c44f0166bee55ab.png
2.4 安装Boost(C++库集)
Boost库提供了跨平台的C++组件,涵盖智能指针、多线程、文件系统、正则表达式等,许多机器人软件框架和算法库都依赖于Boost提供的丰富功能。
安装说明: Ubuntu 22.04 默认版本Boost 1.74
sudo apt install libboost-all-dev
# 通过dpkg查看已安装的Boost版本
dpkg -s libboost-dev | grep 'Version'# 或者类似前面通过宏定义
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"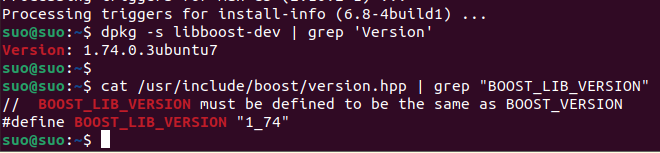
9c4cde97fa7aee90193a1f47eb6a6d4d.png
2.5 安装 Python3 及工具包
Python用于脚本工具编写、上层应用开发等实际程序的开发,pip是Python的包管理工具,venv用于创建独立的虚拟环境安装说明: Ubuntu 22.04已预装Python 3.10,建议安装完整开发套件。sudo apt install python3 python3-pip python3-dev python3-venv
python3 --version # 查看Python版本
pip3 --version # 包管理器版本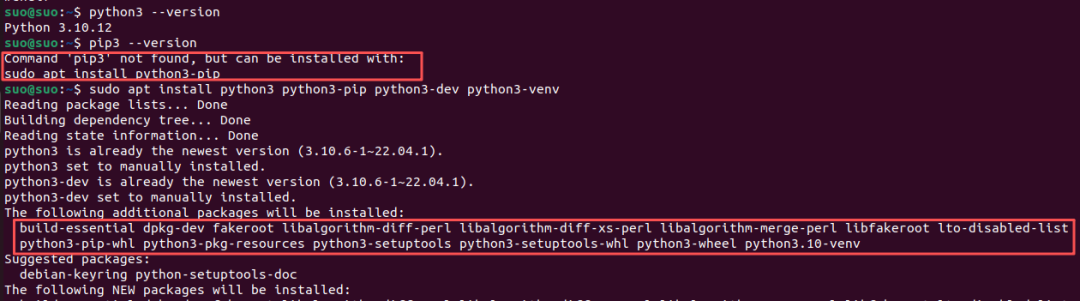
04e04d80b56f96b57a97c324ba6c6740.png

2c3bf18cf881ea22e11de6ed03257adf.png
3. 仿真环境配置(MuJoCo)
3.1 安装 MuJoCo 物理引擎
MuJoCo(Multi-Joint dynamics with Contact)是一款专注于机器人控制和生物力学仿真的高性能物理引擎,优势是计算速度快、接触模型精确,安装步骤如下:
a. 获取许可证与安装包:
访问 MuJoCo官网(www.mujoco.org/) 获取免费的个人许可证(一个 mykey.txt 文件)。
同时,从其 GitHub Releases(github.com/google-deepmind/mujoco/releases) 页面下载适用于Linux的最新版本(当前最新为3.4,根据平台选择,比如x86选mujoco-3.4.0-linux-x86_64.tar.gz)
b. 解压与放置
# 创建隐藏目录并解压
mkdir -p ~/.mujoco
tar -xzf ~/Downloads/mujoco-3.4.0-linux-x86_64.tar.gz -C ~/.mujoco
# 将许可证密钥拷贝到对应目录
cp ~/Downloads/mjkey.txt ~/.mujoco/c. 设置环境变量:
将以下行添加到你的 ~/.bashrc 文件末尾,然后执行 source ~/.bashrc 使其生效。
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$HOME/.mujoco/mujoco-3.4.0/bin
export MUJOCO_PY_MUJOCO_PATH=$HOME/.mujoco/mujoco-3.4.0d. 安装Python接口:
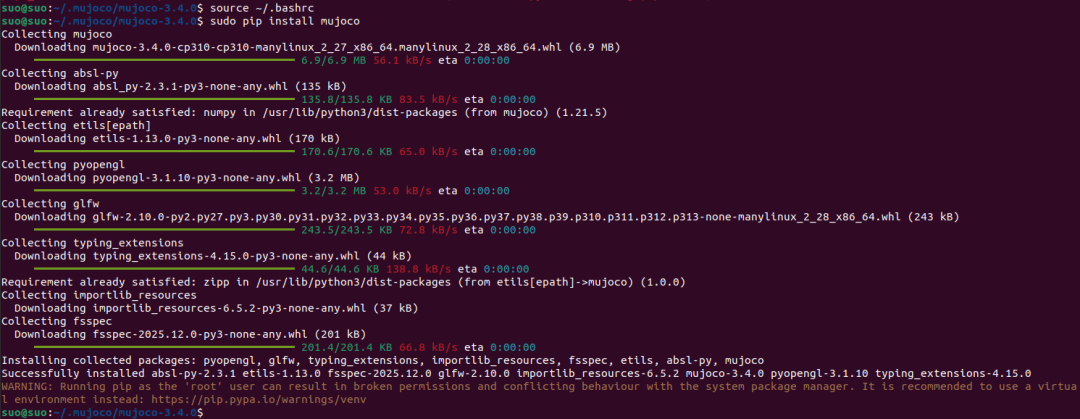
通过pip安装mujoco库,以便在Python中调用MuJoCo
sudo pip install mujoco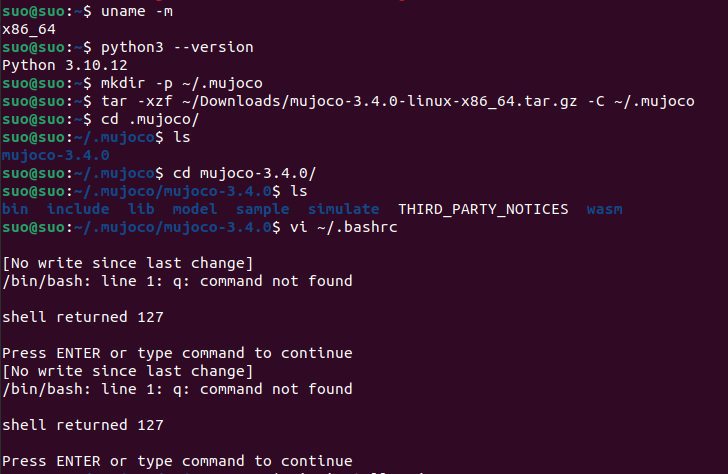
8b26b3fcaaa29bfdb8ba7c1a2c5cb3ff.png
dbeb09333970dd3f4ddc6802ac98fb6f.png
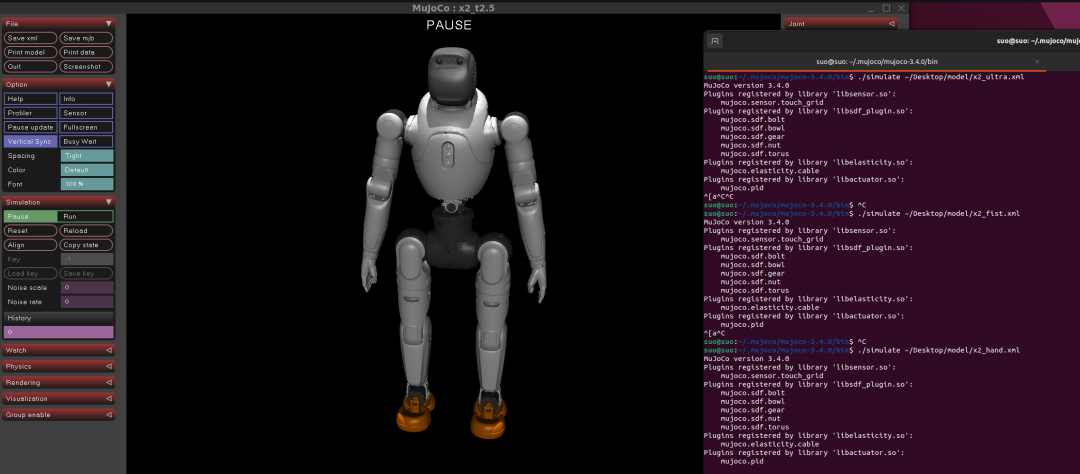
3.2 模型加载与显示
先从文末链接中下载x2模型,然后通过mujoco引擎的simulate指令,引入对应模型,即可显示如下效果,自此完成了模型引入和开发环境的搭建,后面文章将进一步在仿真环境中,实现机器人运动控制相关开发介绍。
cd ~/.mujoco/mujoco-3.3.4/bin
./simulate ~/model/x2_ultra.xml
./simulate ~/model/x2_hand.xml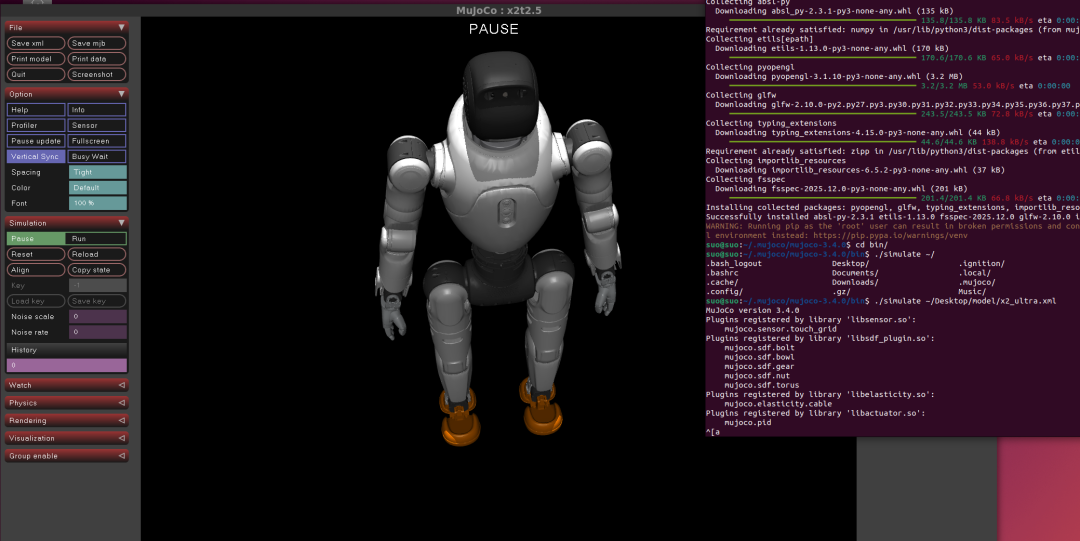
3960050228f389a6b8a6ed94c1f0892f.png
13b46543da295895fe78e86f29a0a053.png
3.3 模型下载(链接或扫码)
https://agirobot.feishu.cn/share/base/form/shrcnIAXZ0DDER5tXDZCVgNVVMf
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-12-19,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号