用 YOLOv8 + DeepSORT 实现目标检测、追踪与速度估算
原创
用 YOLOv8 + DeepSORT 实现目标检测、追踪与速度估算
原创
CoovallyAIHub
发布于 2025-07-02 10:11:27
发布于 2025-07-02 10:11:27
【导读】
目标检测与追踪技术是计算机视觉领域最热门的应用之一,广泛应用于自动驾驶、交通监控、安全防护等场景。今天我们将带你一步步实现一个完整的项目,使用YOLOv8 + DeepSORT实现目标检测、追踪与速度估算。
一、项目简介
本项目将实现一个功能完备的系统,具备以下能力:
- 检测:使用 YOLOv8 快速识别图像/视频中的物体;
- 追踪:用 DeepSORT 对目标进行多帧跟踪与编号;
- 估速:通过帧间位移计算目标的移动速度;
- 统计:支持计数通过检测线的车辆数量。
技术选型:
- YOLOv8:最新一代 YOLO 模型,速度快、精度高;
- DeepSORT:强化版追踪算法,结合深度特征提高 ID 保持能力。
二、项目环境配置
克隆项目代码
git clone https://github.com/Gayathri-Selvaganapathi/vehicle_tracking_counting.git
cd vehicle_tracking_counting创建虚拟环境并安装依赖
推荐使用 conda:
conda create -n env_tracking python=3.8
conda activate env_tracking
pip install -r requirements.txt更轻松的方式:试试 Coovally 平台
觉得环境配置太繁琐?代码跑起来效率太低?Coovally 平台就是你轻量开发的理想选择!
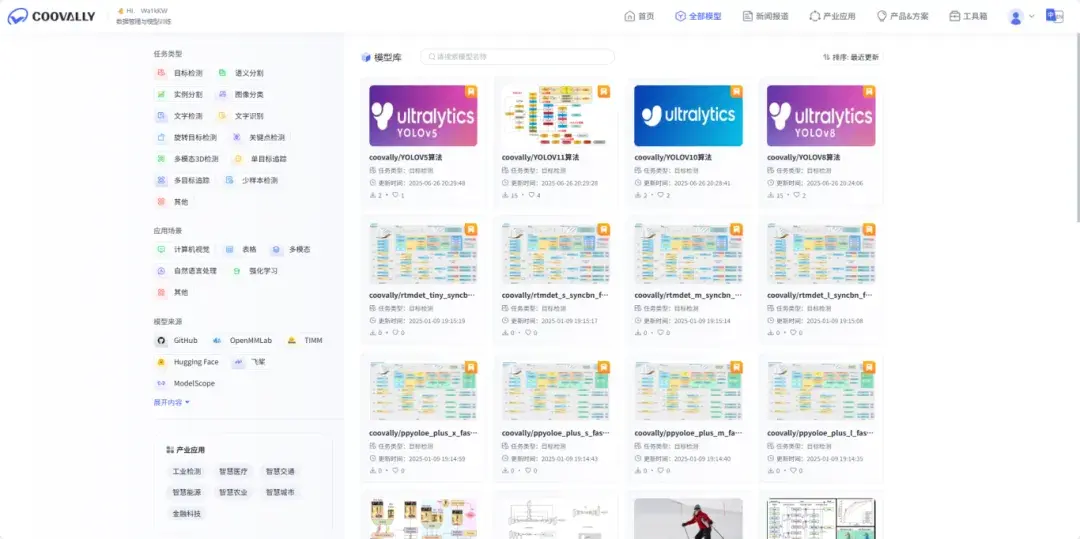
Coovally已集成YOLOv8和DeepSORT模型,可直接一键调用。
且平台还内置1000+可一键调用的开源模型,覆盖目标检测、关键点检测、多模态3D检测、目标追踪等各类任务。
- 无需写代码:上传数据集、选择模型、配置参数、启动训练,全部可视化操作!
- 训练过程实时可视: 准确率、损失曲线、预测图像一目了然,结果即训即看,助你快速验证算法性能!
动图封面
三、实现流程详解
文件准备
除 GitHub 项目外,还需额外下载:
- DeepSORT模型文件(见 README 中的 Google Drive 链接);
- 示例视频文件,用于测试检测与追踪效果。
将上述资源分别放入:
- deep_sort → 模型目录;
- data → 视频文件目录。
四、运行检测与追踪
一行命令启动全流程:
python detect.py --source data/sample_video.mp4 --yolo-model yolov8 --deep-sort deep_sort_pytorch --output runs/detect程序会处理视频、进行检测与追踪,并输出结果视频到 runs/detect/ 目录中。
五、关键代码解析
初始化 DeepSORT
from deep_sort.deep_sort import DeepSort
def init_tracker():
return DeepSort("deep_sort/model.ckpt", use_cuda=True)YOLOv8 目标检测
def detect_objects(frame, model):
results = model(frame)
return results.xyxy[0]绘制边框与编号
def draw_boxes(frame, bbox, identities, names):
for i, box in enumerate(bbox):
...
cv2.rectangle(...)
cv2.putText(...)
return frame速度估算(单位:km/h)
def estimate_speed(coord1, coord2, fps):
d_pixels = np.linalg.norm(np.array(coord2) - np.array(coord1))
d_meters = d_pixels / PIXELS_PER_METER
speed = d_meters * fps * 3.6
return speed六、项目效果与结果解读
输出效果包括:
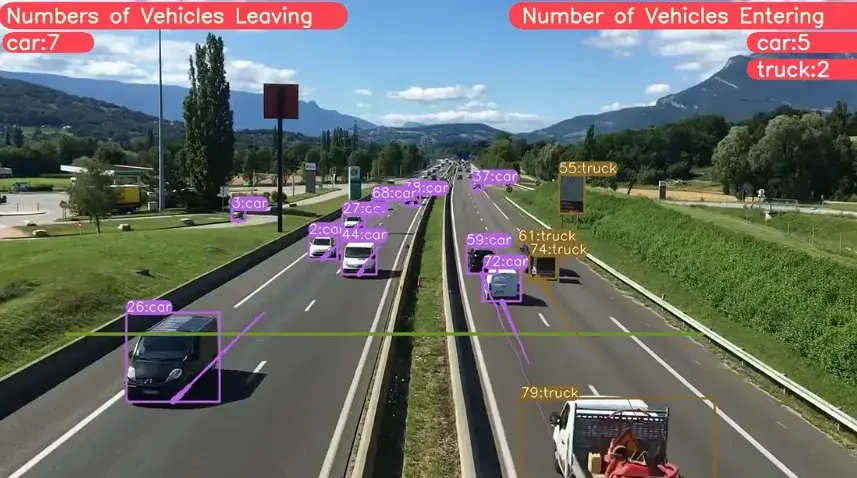
- 边框框选目标对象;
- 每个目标拥有唯一 ID 标签;
- 若启用速度估算,会在图像中实时展示速度值;
- 支持计数功能,统计通过线段的车辆数量。
# 判断是否通过计数线
if is_crossing_line(bbox, line_position):
vehicle_count += 1
# 计算速度
speed = estimate_speed(previous_coord, current_coord, fps)七、项目拓展建议
这个项目还可以进一步扩展:
- 训练自定义模型:在 Coovally 上使用自己标注的数据训练YOLOv8;
- 集成多摄像头系统:实现多视角追踪与分析;
- 接入可视化大屏/控制后台:用于城市级交通监控、智慧安防系统等。
总结
我们通过本项目实现了一个高效的目标检测 + 多目标追踪 + 速度估算系统,技术组合为:
- YOLOv8 → 高效检测;
- DeepSORT → 高精度追踪;
- 简洁清晰的速度统计与车辆计数。
借助像 Coovally 这样的 AI 平台,不仅可以快速部署,还能极大提高迭代效率,助力你在算法验证、项目开发中快人一步!
欢迎留言讨论:你觉得 YOLOv8 + DeepSORT 最适合用于哪些场景?你是否在用其他更轻量的追踪算法?
关注我们,获取更多开源 AI 实战技巧与平台实测指南!
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号