PTP协议赋能高精度时间同步网络
原创

什么是PTP?
PTP(精确时间协议,Precision Time Protocol) 是一种基于IEEE 1588标准的网络时间同步协议,旨在为分布式系统中的设备提供亚微秒级(甚至纳秒级)的高精度时钟同步。其核心目标是通过消除网络传输延迟的不确定性,确保跨设备的动作、数据采集或控制指令在严格统一的时间基准下执行。
什么领域需要PTP?
在园区网络中,随着物联网、工业自动化、金融交易和高清视频协作等应用的普及,设备间对高精度时间同步的需求日益增强。
传统网络时间协议(NTP)仅能提供毫秒级同步精度,难以满足微秒甚至纳秒级场景(如传感器协同、5G基站调度、分布式系统事务一致性)的严苛要求。
IEEE 1588定义的精确时间协议(PTP)通过硬件时间戳消除网络传输延迟误差,结合主从时钟架构动态补偿链路不对称性,可为园区内的摄像头、工业控制器、服务器集群等设备提供亚微秒级同步,保障实时业务时序精准性、故障诊断准确性及系统协同效率,成为智能园区低时延、高可靠组网的核心基础。
PTP的核心优势(对比NTP)
维度 | PTP | NTP |
|---|---|---|
同步精度 | 微秒/纳秒级(硬件支持) | 毫秒级(软件实现) |
延迟抖动 | 通过硬件时间戳和TC/BC消除抖动 | 受操作系统和网络波动影响 |
适用场景 | 工业控制、5G、金融高频交易等 | 办公、IT系统、通用服务 |
部署成本 | 高(需专用硬件) | 低(纯软件) |
PTP实现时间同步的核心机制
实现时间同步的两种核心机制:一步模式(单步模式) 与 两步模式(双步模式),主要区别在于时间戳的嵌入方式、网络开销及硬件依赖。以下是两者的对比解析:
两步模式(Two-Step)
- 兼容性高 :适用于不支持硬件时间戳的设备,依赖软件处理。
- 网络开销大 :需额外传输Follow_Up报文,增加带宽占用。
- 抗干扰性弱 :在高负载网络中,Sync与Follow_Up报文可能因拥塞失序,导致同步误差。
PTP锁定主从同步过程
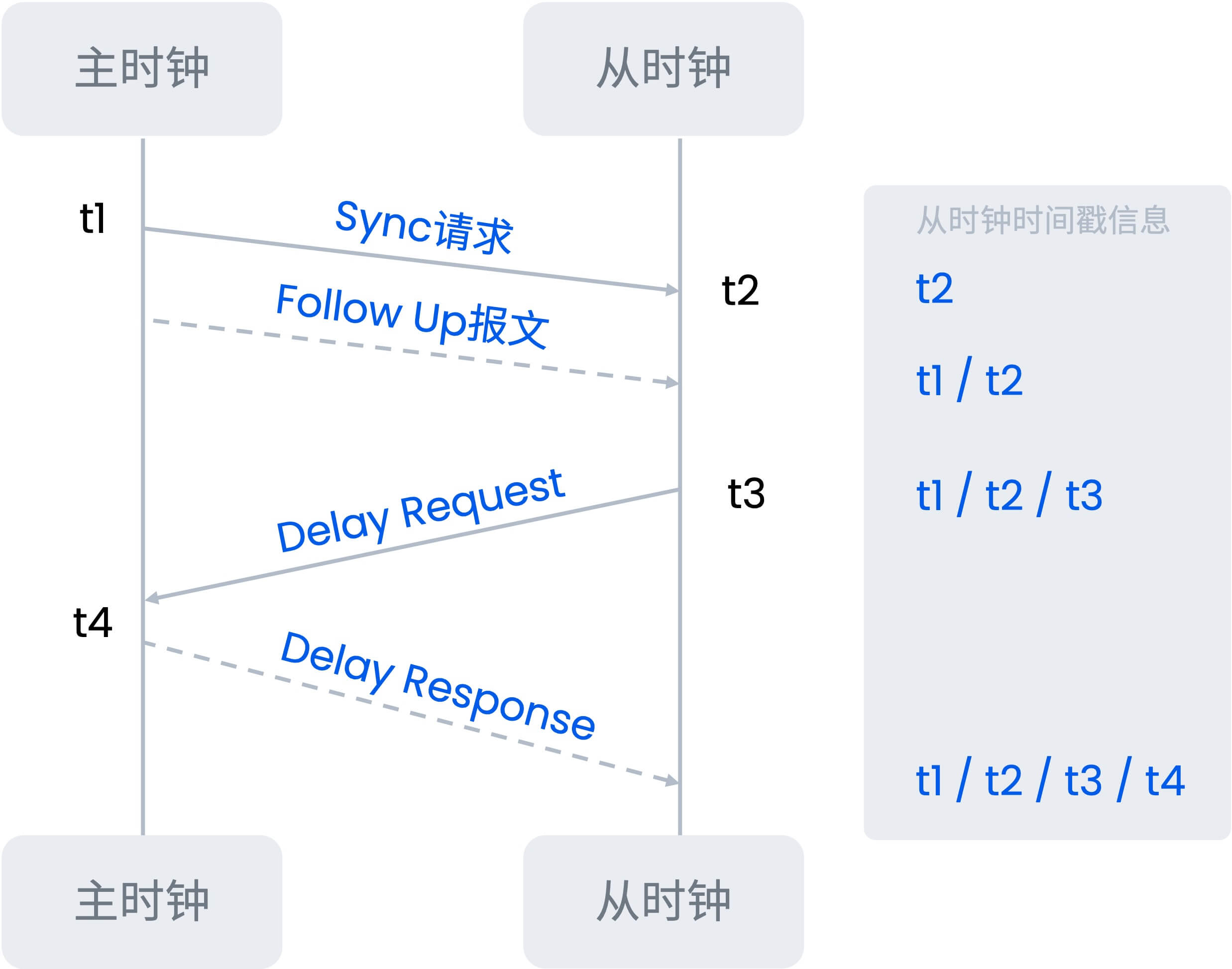
主时钟先发送 Sync报文 ,记录其发送时刻 t1 ,随后通过 Follow_Up报文 将 t1 传递给从时钟。 从时钟接收Sync报文时记录接收时刻 t2 ,再发送 Delay_Req报文记录发送时刻 t3 ,主时钟响应 Delay_Resp报文返回接收时刻 t4。
在这些交换结束后,从属时钟拥有所有四个时间戳。因此,它可以计算出它的时钟相对于主时钟的偏移量为:
偏移 = (t2 + t3 – t1 – t4) /2
一步模式(One-Step)
- 高精度 :硬件级时间戳消除协议栈处理延迟,同步精度可达纳秒级 。
- 低网络开销 :减少50%的PTP报文数量,降低网络负载。
- 硬件依赖性强 :需PHY/MAC芯片支持硬件时间戳嵌入功能,成本较高 。
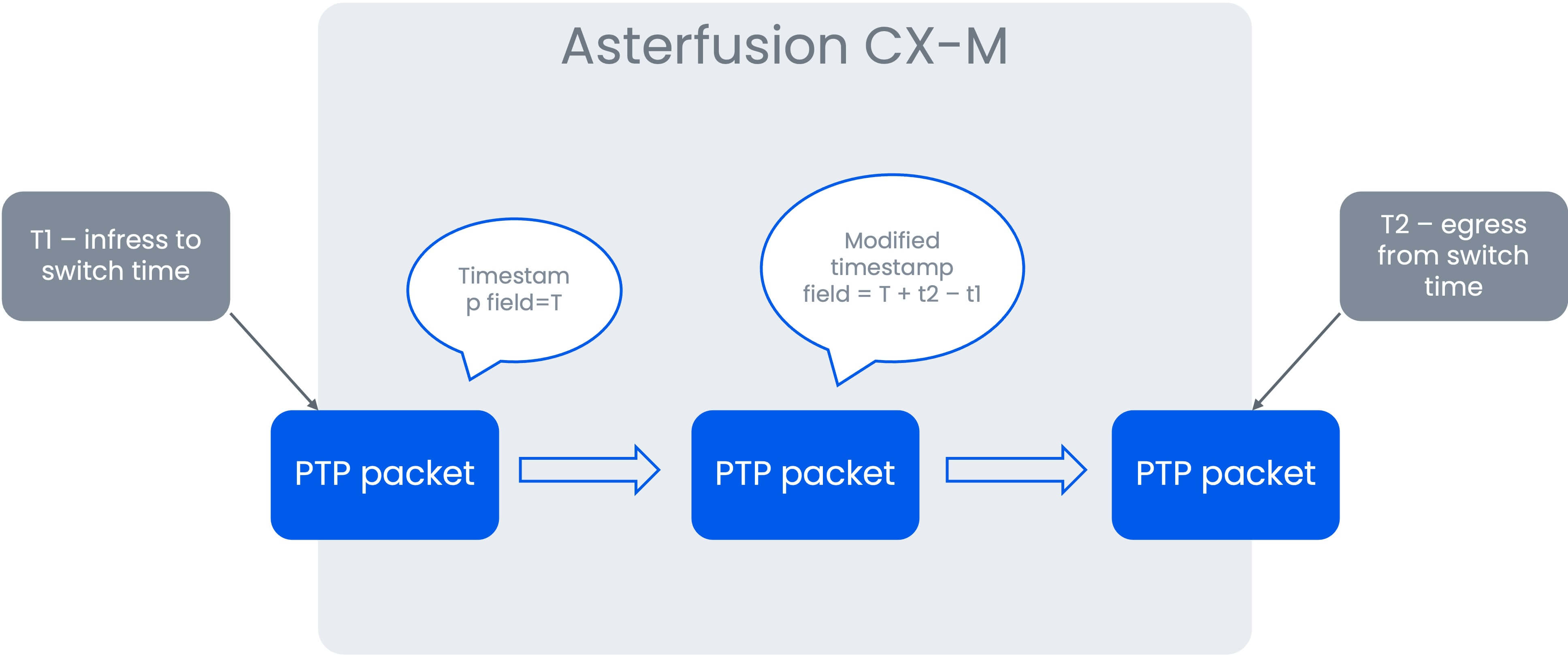
单步模式将时间戳直接嵌入Sync报文,无需Follow_Up报文: 主时钟在发送Sync报文时,硬件芯片实时标记 t1 并写入报文字段 。 从时钟接收Sync报文后,直接提取 t1 与本地记录的 t2 计算偏移和延迟。
特性 | 一步模式 | 两步模式 |
|---|---|---|
同步精度 | 纳秒级(硬件时间戳) | 微秒级(软件时间戳) |
报文数量 | 少(无Follow_Up) | 多(需Follow_Up) |
硬件要求 | 需专用PHY/MAC芯片 | 通用网络设备兼容 |
适用场景 | 工业实时控制、高频交易 | 普通办公网络、传统音视频传输 |
新一代园区交换机多款产品支持PTP功能,同步精度可达20ns?!
作为新一代开放网络解决方案提供商,其多款园区级交换机深度集成 IEEE 1588 PTP(精确时间协议) 功能,结合硬件加速、高精度时钟设计及基于SONIC自研AsterNOS网络操作系统,可为工业控制、金融交易、5G基站等场景提供纳秒级时间同步能力,最高精度可达 20ns,助力企业构建高可靠、低时延的智能网络底座。

通过硬件与软件协同设计,星融元突破传统同步瓶颈:
- 基于SONiC生态的PTP协议:基于SONiC的企业级发行版AsterNOS,结合开源linuxPTP项目(遵循IEEE 1588标准的PTP协议实现),通过自主研发的PTP功能与SONiC深度集成,拥有高精度、高可靠的时间同步能力。
- 通过标准化接口实现灵活配置:AsterNOS提供丰富的RESTful API,用户可通过编程接口直接配置PTP参数(如主从时钟选择、同步间隔调整等),实现自动化运维。
- 面向超低时延场景的优化:硬件平台(如CX854E-N)采用的Marvell TL10支持PTP的芯片,结合AsterNOS的软件优化,可实现纳秒级时间同步精度。通过内存数据库Redis实现模块间状态同步,可能用于实时记录和分发PTP时间戳数据,提升同步效率和系统可靠性。
- 定制化开发与生态兼容性:支持多厂商芯片(如Marvell Teralynx(部分)、Prestera等),确保PTP在不同硬件平台上的兼容性,满足异构网络部署需求。
【参考文献】
- https://developer.nvidia.com/zh-cn/blog/calculating-and-synchronizing-time-with-the-precision-timing-protocol-on-the-nvidia-spectrum-switch/
- https://wenku.csdn.net/column/570bfqwsyp
- https://haocst.com/terms-definition/time-server-terms-analysis/ieee-1588-accurate/
- https://mp.weixin.qq.com/s?__biz=MzkzOTMzOTk0Nw==&mid=2247484248&idx=4&sn=321e6d8cbab963177d11f840adcc1115&chksm=c2f33a9cf584b38ac9e39213aed3076a34eadba25e532ea805919ba51910ea4271861eda6390#rd
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号