
在转换PCL点云时丢失的精度
在转换PCL点云时丢失的精度
提问于 2019-08-12 17:49:10
我正在使用来自PCL的这来转换我所拥有的点云。基本上,我只是通过一些偏移来翻译云。
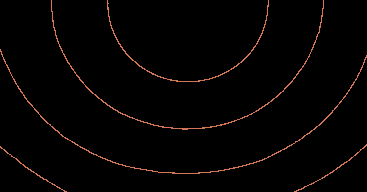
问题是,在应用这个转换之后,我就失去了精度。在下图中更清楚。
我看到,只有当我的偏移量有较大的值(>6位)时,才会发生这种情况,而云正是通过这个值进行转换的。
下面是使用pcl库的代码
Eigen::Matrix4d translationMatrix = Eigen::Matrix4d::Identity();
//translation
translationMatrix(0,3) = 1000000;
translationMatrix(1,3) = 1000000;
pcl::PointCloud<pcl::PointXYZ>::Ptr translatedCloud;
translatedCloud.reset(new pcl::PointCloud<pcl::PointXYZ>());
pcl::transformPointCloud(*cloud,*translatedCloud,translationMatrix);
pcl::io::savePCDFileASCII ("translatedCloud.pcd",*translatedCloud);原始云
变换云
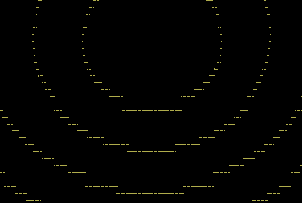
我怀疑问题可能是所使用的数据类型的范围。
任何有关这方面的资料都是有帮助的。
回答 2
Stack Overflow用户
回答已采纳
发布于 2019-09-08 17:22:59
问题在于所使用的抵消范围。pcl::PointXYZ有点作为浮点数,所以当提供超出范围的这种偏移时,它会舍弃结果,从而导致精度的损失。解决这一问题的一个明显办法是,如果可能的话,将范围正常化。另一种解决方案是在PCL中添加自定义点类型。PCL提供了一个不错的文档。
Stack Overflow用户
发布于 2020-04-16 06:26:25
您可以通过精确的输入直接使用PCDWriter类。
按照建议,在PCL中创建自定义点类型,并将其保存在ASCII中。只有ASCII格式具有此精确输入。不知道其他格式。
注意:对于这种新的双类型自定义点云,可用的工具不能工作,因为PCL使用浮点。欲了解更多信息:链接
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/57465898
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号