
OpenCV recoverPose相机坐标系
我用下面的代码来估计单个摄像机的平移和旋转。
E, mask = cv2.findEssentialMat(k1, k2,
focal = SCALE_FACTOR * 2868
pp = (1920/2 * SCALE_FACTOR, 1080/2 * SCALE_FACTOR),
method = cv2.RANSAC,
prob = 0.999,
threshold = 1.0)
points, R, t, mask = cv2.recoverPose(E, k1, k2)其中k1和k2是我匹配的一组关键点,它们是Nx2矩阵,其中第一列是x坐标,第二列是y坐标。
我收集所有的翻译在几个帧,并产生一个路径,相机走了这样。
def generate_path(rotations, translations):
path = []
current_point = np.array([0, 0, 0])
for R, t in zip(rotations, translations):
path.append(current_point)
# don't care about rotation of a single point
current_point = current_point + t.reshape((3,)
return np.array(path)所以,我对此有一些意见。
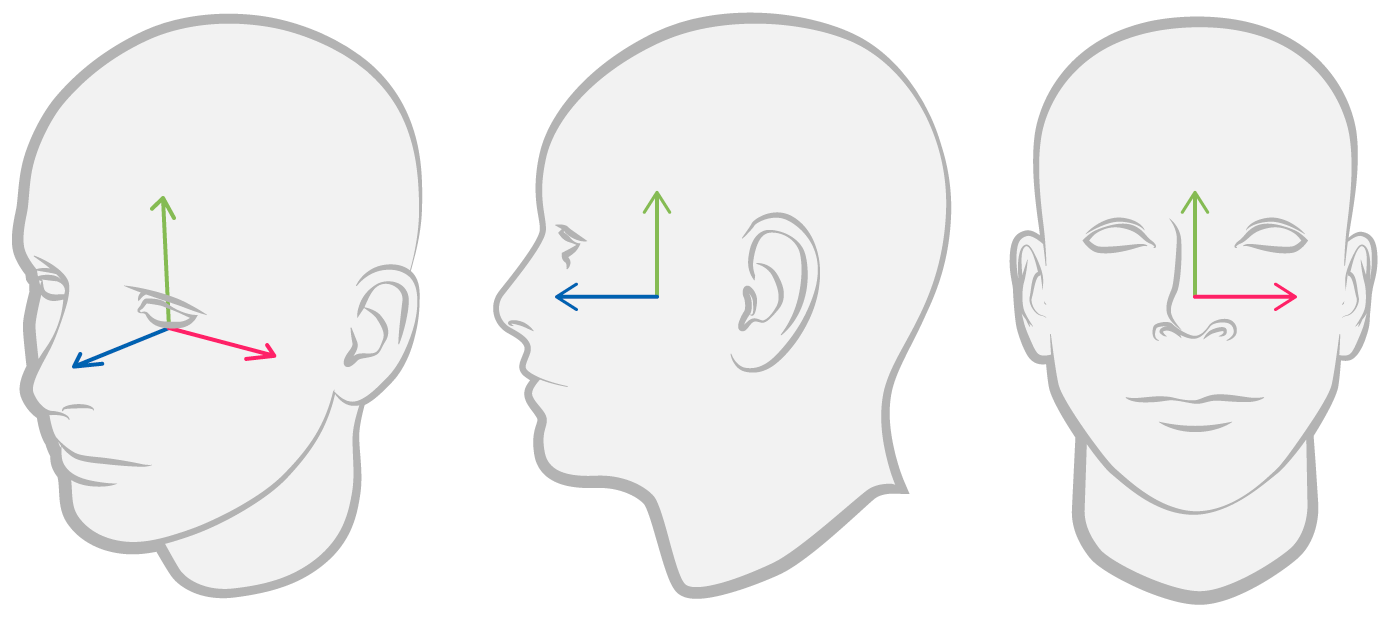
- OpenCV相机坐标系表明,如果我想查看摄像机路径的2D“自上而下”视图,我应该沿着X平面绘制平移图。
plt.plot(path[:,0], path[:,2])
这是完全错误的。
但是,如果我写这个代替
plt.plot(path[:,0], path[:,1])
我得到以下信息(在做了一些平均处理之后)
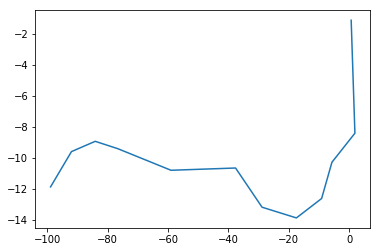
这条路基本上是完美的。那么,也许我误解了cv2.recoverPose使用的坐标系惯例?为什么摄像机路径的“鸟瞰”应该沿着XY平面而不是XZ平面?
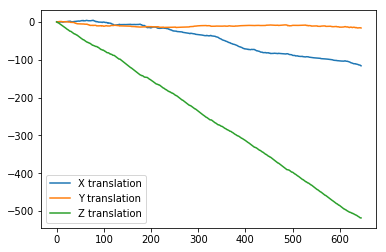
- 另一个,也许是无关的问题是,报道的Z-翻译似乎呈线性下降,这是没有意义的。
我很确定我的代码中有一个bug,因为这些问题看起来是系统性的,但是我想确保我对坐标系统的理解是正确的,这样我就可以限制用于调试的搜索空间。
回答 1
Stack Overflow用户
发布于 2019-05-21 09:54:45
实际上,在一开始,您的方法并没有产生真正的路径。recoverPose()生成的转换t始终是一个单位向量。因此,在你的“路径”中,每一帧都是从前一帧移动1“米”。正确的方法是: 1)初始化:( featureMatch,findEssentialMatrix,recoverPose),2)跟踪:(三角,featureMatch,solvePnP)。如果您想更深入地挖掘,查找有关单目Visual的教程将有帮助。
其次,你可能把相机坐标系和世界坐标系搞砸了。如果你想要绘制轨道,你可以使用世界坐标系,而不是相机坐标系。此外,recoverPose()的结果也在世界坐标系中。世界坐标系是:x轴指向右边,y轴指向前方,z轴指向up.Thus,当你想绘制‘鸟瞰’时,你应该沿着X平面绘制正确的图。
https://stackoverflow.com/questions/56045839
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号