
一种线跟随机器人(带摄像机)的算法
一种线跟随机器人(带摄像机)的算法
提问于 2019-05-05 22:42:48
我想写代码(python,opencv)线跟随机器人配备了相机和Raspberry Pi。我想让机器人走得越快越好
- 这门课很少有像这样的急转弯:
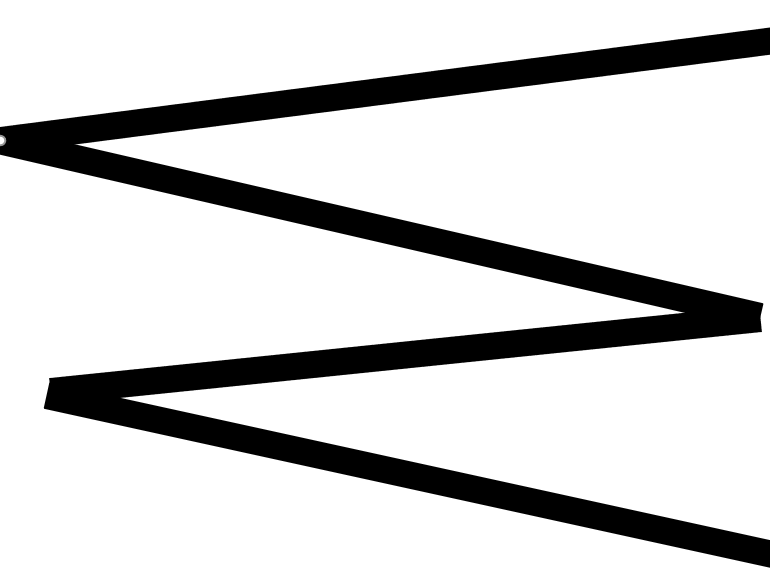
我假设当机器人接近转弯时,使用ROI (感兴趣区域)将不能很好地工作(它还将捕获/“查看”另一行)--例如,如下所示。这里最好的方法是什么?

- 在课程中有一个交界处,如下图所示,
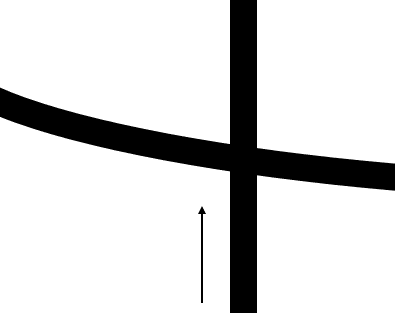
如何“理解”这是一个交界处?如果机器人是为了图像的底部,如何使算法继续直线行驶,而不被水平线所迷惑?
回答 1
Stack Overflow用户
发布于 2020-06-22 10:31:17
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/55997039
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号