
在ARFaceAnchor会话中从ARFaceTracking中找出头部倾斜角
在ARFaceAnchor会话中从ARFaceTracking中找出头部倾斜角
提问于 2018-03-18 17:55:23
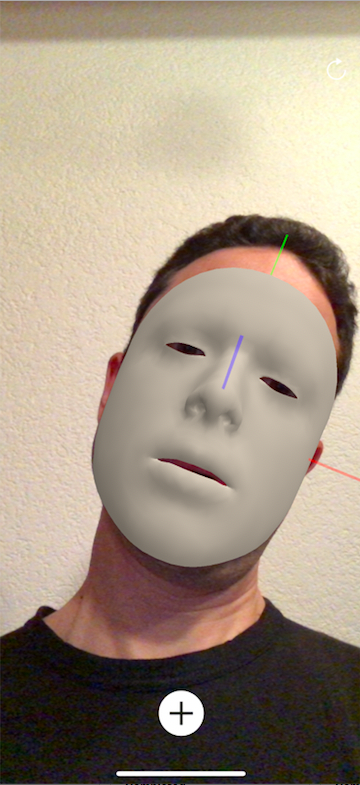
我试图找出头部的角度与y轴在一个ARFaceAnchor。我的第一个例子是苹果的示例代码:创建基于人脸的AR体验。
给出这张图像,我基本上是在搜索绿色标记的角度(从coordinateOrigin节点)相对于垂直轴。
ARFaceAnchor对象继承自ARAnchor , providing atransform`的属性:
编码锚相对于锚所在的AR会话的世界坐标空间的位置、方向和规模的矩阵。
这类transform的类型如下:var transform: matrix_float4x4 { get }
如何从这个矩阵中导出角度信息,比如描述的角度信息?
回答 1
Stack Overflow用户
发布于 2021-02-08 23:23:52
由于Apple没有为这个类提供四元数到euler转换,所以在我的例子中,我不得不手工计算它们,如下所示。
请找到参考这里,这是受这个数学资源启发。
extension matrix_float4x4 {
// Function to convert rad to deg
func radiansToDegress(radians: Float32) -> Float32 {
return radians * 180 / (Float32.pi)
}
var translation: SCNVector3 {
get {
return SCNVector3Make(columns.3.x, columns.3.y, columns.3.z)
}
}
// Retrieve euler angles from a quaternion matrix
var eulerAngles: SCNVector3 {
get {
// Get quaternions
// http://www.euclideanspace.com/maths/geometry/rotations/conversions/matrixToQuaternion/index.htm
let qw = sqrt(1 + self.columns.0.x + self.columns.1.y + self.columns.2.z) / 2.0
let qx = (self.columns.2.y - self.columns.1.z) / (qw * 4.0)
let qy = (self.columns.0.z - self.columns.2.x) / (qw * 4.0)
let qz = (self.columns.1.x - self.columns.0.y) / (qw * 4.0)
// Deduce euler angles with some cosines
// https://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles
/// yaw (z-axis rotation)
let siny = +2.0 * (qw * qz + qx * qy)
let cosy = +1.0 - 2.0 * (qy * qy + qz * qz)
let yaw = radiansToDegress(radians:atan2(siny, cosy))
// pitch (y-axis rotation)
let sinp = +2.0 * (qw * qy - qz * qx)
var pitch: Float
if abs(sinp) >= 1 {
pitch = radiansToDegress(radians:copysign(Float.pi / 2, sinp))
} else {
pitch = radiansToDegress(radians:asin(sinp))
}
/// roll (x-axis rotation)
let sinr = +2.0 * (qw * qx + qy * qz)
let cosr = +1.0 - 2.0 * (qx * qx + qy * qy)
let roll = radiansToDegress(radians:atan2(sinr, cosr))
/// return array containing ypr values
return SCNVector3(yaw, pitch, roll)
}
}
}页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/49351144
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号