
静态环境下多机器人路径规划与避碰。
我要开始一个机器人项目的工作。在讨论这个问题之前,让我先简单介绍一下这个项目的设立情况。
该装置包括一个设施,其中有一个铁路系统,并有多个机器人安装在上面。环境是静态的,只有移动机器人。到目前为止,它可以是3个机器人货车在这些轨道上。这些机器人是用于挑选位置的tasks.There,因此这些机器人之间没有通信,但是它们连接到服务器,这就赋予了机器人任务。
请看一下粗略的草图(请原谅我看了这张糟糕的图表),以便对设置有一个概念。
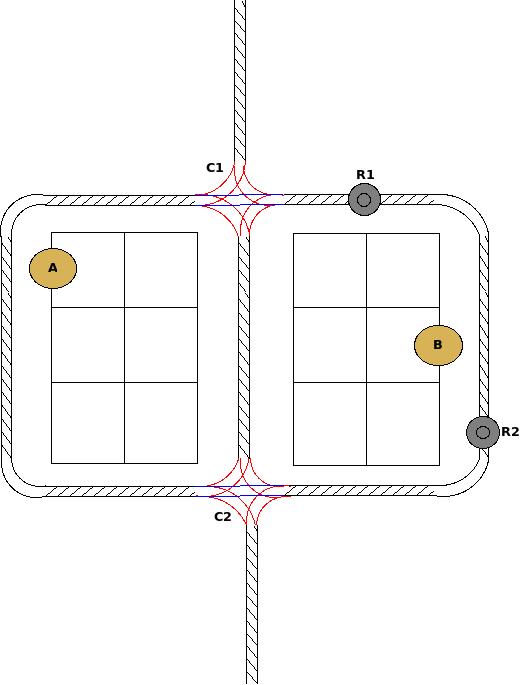
从上面的图表来看,R1和R2是轨道上的机器人。服务器可以为机器人R1分配一项任务,用于在"A“处选择对象并将其放在"B”处,机器人必须完全自主地移动。现在,我的查询如下:
- 机器人R1如何移动到"A“,然后移动到"B",选择最优路径,涉及机器人的路径规划?
- 机器人如何避免在静态地图中与轨道上的其他移动机器人发生碰撞?(我正在考虑用照相机探测另一个机器人)
我查阅了一些文献,并有了一个基本的想法。我还在这里浏览了一些被问到的question。但我没有任何具体的想法开始工作。我正在寻找一些关于这个问题的建议/想法/算法/文献。请帮帮我。提前谢谢!!
注:我将在一个三维环境中模拟整个设置。
回答 1
Stack Overflow用户
发布于 2014-07-28 15:11:49
对于第一个问题,以整个铁路网为图,采用最短路径算法求出最优路径。
我不知道在将R1移动到A和B时,是否允许您移动其他机器人。如果某些机器人不能移动,那么将铁路的这些部分从图中移除,并计算路径。
为了避免碰撞,一种方法是只允许沿着铁轨沿一个方向运动(这里的数字为8)。总的来说,这不应该是一个问题,因为您正在控制一个中央服务器的机器人。
https://stackoverflow.com/questions/24998038
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号