
线路跟随机器人位置
我正在做一个线跟随机器人,它在地图上由节点组成,但混淆的是如何让机器人知道他站在哪个节点,换句话说,应该采取什么方法将地图提供给机器人,以便它知道地图的每个节点,同时也知道他现在是哪个节点。
我在网上搜索了很多,但这似乎不值得。
回答 1
Stack Overflow用户
发布于 2021-02-02 07:47:34
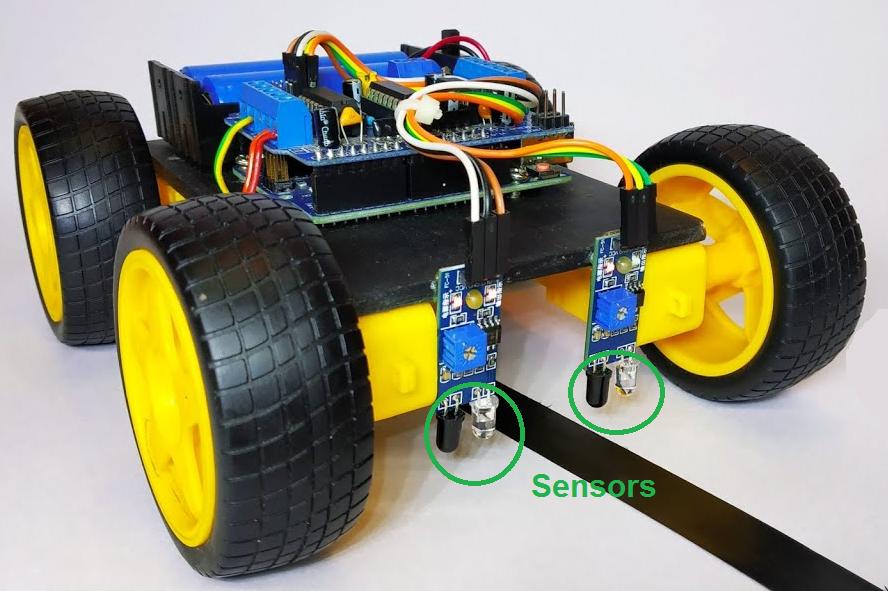
线跟随者通常没有任何地图。相反,通常有一对指向下方的前端传感器(通常是红外光电二极管和发光二极管),它可以探测从左右方向的直线交叉,而机器人只需转向这条线。
它通常是通过控制左右电机的速度来实现的(通常没有任何单片机或CPU,模拟版本只使用两个比较器和功率放大器来驱动电机,而不是像锯齿一样的模式,从而使电机的运动更加平稳)。
更好的机器人也有内置算法,如果它有漏洞(通常需要CPU或MCU),就可以搜索行。
,如果您坚持要有map,那么您需要接口来复制它(例如,ISP),但是为了检测到机器人所在的位置,需要实际跟踪这条线,记住该轨迹并将其与地图进行比较,直到检测到的轨迹只对应于地图中的一个位置和方向,然而,最终您只会得到更复杂、更不可靠的机器人,这些机器人的特性或多或少与简单的直线跟随器相同或更糟糕。
另一种选择是使用定位系统,这样就可以在迷宫或地图上建立定位系统(可以是标记或应答器或其他任何东西),或者将机器人放置到预定的位置和方向,并按复位按钮,或者使用加速度计和陀螺仪来随着时间的推移集成位置,但是,正如我所提到的那样,对于直线跟随器来说,这一点都没有好处。这种东西是更好的未知迷宫解决机器人(他们通常使用声纳或红外photodiode+LED,无论是面向前方和侧面,而不是向下)。
https://stackoverflow.com/questions/66005128
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号