
并行化代码(DifferentialEquations.jl) -朱莉娅
我有以下耦合的PDE系统(来自于离散积分微分PDE):
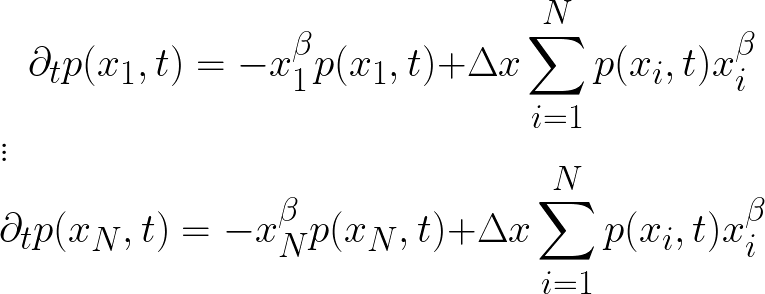
习是我控制的x网格上的点。我可以用以下简单的代码来解决这个问题:
using DifferentialEquations
function ode_syst(du,u,p, t)
N = Int64(p[1])
beta= p[2]
deltax = 1/(N+1)
xs = [deltax*i for i in 1:N]
for j in 1:N
du[j] = -xs[j]^(beta)*u[j]+deltax*sum([u[i]*xs[i]^(beta) for i in 1:N])
end
end
N = 1000
u0 = ones(N)
beta = 2.0
p = [N, beta]
tspan = (0.0, 10^3);
prob = ODEProblem(ode_syst,u0,tspan,p);
sol = solve(prob);然而,随着网格的细化,即增加N,计算时间迅速增长(我猜在N中是二次定标)。对于如何使用分布式并行或多线程来实现这一点,有什么建议吗?
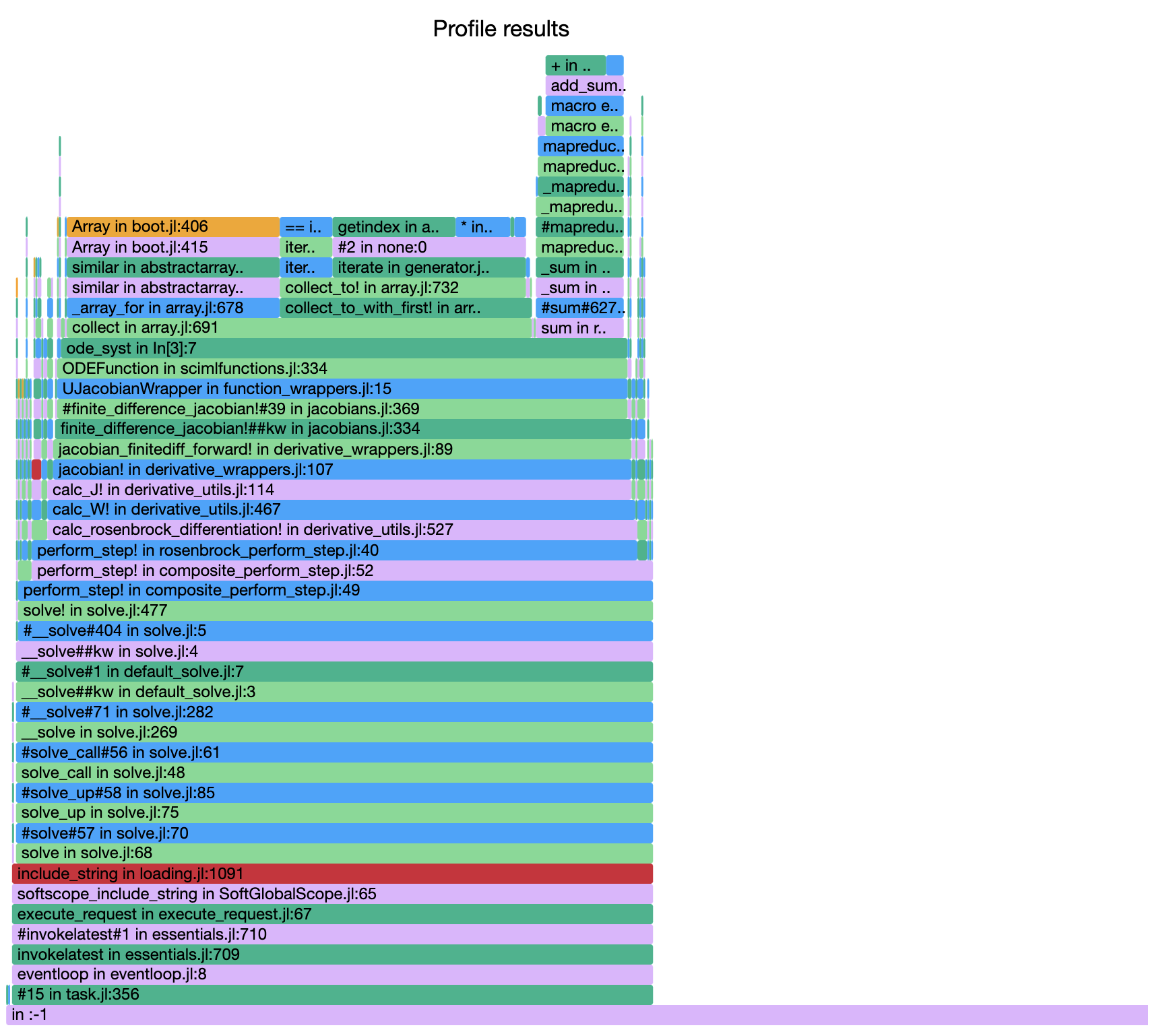
附加信息:--我附加了可能有助于理解程序大部分时间花费在何处的剖析图
回答 2
Stack Overflow用户
发布于 2021-09-29 18:52:29
我查看了您的代码,发现了一些问题,例如由于重新计算和项而意外引入了O(N^2)行为。
我的改进版本使用Tullio包来进一步提高矢量化的速度。Tullio也有可调参数,如果系统变得足够大,就可以进行多线程处理。在这里查看可以调优在“选项”部分的哪些参数。您可能还会看到GPU支持在那里,我没有测试,但它可能会产生进一步的速度或崩溃。我也选择从穴位阵列得到长度,这应该使使用更经济,更容易出错。
using Tullio
function ode_syst_t(du,u,p, t)
N = length(du)
beta = p[1]
deltax = 1/(N+1)
@tullio s := deltax*(u[i]*(i*deltax)^(beta))
@tullio du[j] = -(j*deltax)^(beta)*u[j] + s
return nothing
end你的代码:
@btime sol = solve(prob);
80.592 s (1349001 allocations: 10.22 GiB)我的代码:
prob2 = ODEProblem(ode_syst_t,u0,tspan,[2.0]);
@btime sol2 = solve(prob2);
1.171 s (696 allocations: 18.50 MiB)结果大致一致:
julia> sum(abs2, sol2(1000.0) .- sol(1000.0))
1.079046922815598e-14Lutz Lehmanns解决方案-我也设定了基准:
prob3 = ODEProblem(ode_syst_lehm,u0,tspan,p);
@btime sol3 = solve(prob3);
1.338 s (3348 allocations: 39.38 MiB)然而,当我们用tspan (0.0,10.0)来标度N到1000000时,
prob2 = ODEProblem(ode_syst_t,u0,tspan,[2.0]);
@time solve(prob2);
2.429239 seconds (280 allocations: 869.768 MiB, 13.60% gc time)
prob3 = ODEProblem(ode_syst_lehm,u0,tspan,p);
@time solve(prob3);
5.961889 seconds (580 allocations: 1.967 GiB, 11.08% gc time)由于在我的旧机器和生锈机器中使用了两个核,我的代码变得比以前快了一倍多。
Stack Overflow用户
发布于 2021-09-29 18:43:00
分析公式。显然,原子术语重复。所以它们只能计算一次。
function ode_syst(du,u,p, t)
N = Int64(p[1])
beta= p[2]
deltax = 1/(N+1)
xs = [deltax*i for i in 1:N]
term = [ xs[i]^(beta)*u[i] for i in 1:N]
term_sum = deltax*sum(term)
for j in 1:N
du[j] = -term[j]+term_sum
end
end这应该只会线性地增加N。
https://stackoverflow.com/questions/69378110
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号