
Tx抑制时间
对象180 the有以下子索引:
0x00:
0x01:
0x02:
0x03 (抑制时间):这个子索引包含100个步骤的时间锁(见下图)。这可以用于设置在发送PDO之后必须经过的时间,然后再发送PDO。这一次只适用于异步PDO。这是为了防止在映射对象不断更改的情况下连续发送PDO。
0x04 (兼容性条目):这个子索引没有函数,只存在于兼容性原因。
0x05 (事件计时器):这一次( ms)可以用来触发一个事件,该事件处理数据的复制和PDO的发送。
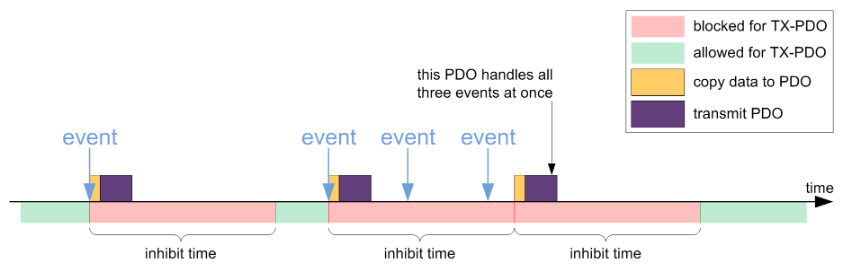
根据上述观点,我们认识到,当事件发生时,确定了一定的时间,这是阻塞的,这是为to;现在,如果事件发生在这个间隔,它将在下一节执行。
为什么要执行整个部分?为什么在最后一部分执行第二、第三和第四事件?
第三次和第四次事件不应该分开执行吗?
回答 1
Stack Overflow用户
发布于 2022-09-05 09:59:01
默认情况下,常见的CANopen设备配置文件(例如,CiA 401“通用I/O模块”)被配置成适合大型自动化网络。也就是说:一个拥有大量节点的大型网络,在那里保持低的公交流量是非常重要的。在这些网络上,节点仅在发生数据更新(发生内部事件)时才发送PDO。
然而,当CANopen用于实时控制系统时,这样的设置是非常不合适的,例如有一个可编程控制器控制一堆控制机器运动的执行器I/O模块。这也可能是一个与安全相关的应用。在这样的系统中,即使数据没有改变,始终以偶数间隔重复发送数据也是自定义的。例如,每10 For /100 For发送一次所有数据。
接收节点只使用最后发送的数据,因此,如果数据丢失/损坏,新的可靠数据将很快再次到达。如果根本没有数据到达,那就意味着某些东西坏了,系统应该恢复到一个安全的状态,在一定的时间内没有收到新的数据。这是移动/汽车控制系统最常见的设计方式,因为它是安全的、确定性的,并且在使用中得到了验证。定制的、非标准的CAN总线协议通常都是这样实现的.
现在,要用CANopen实现这一点,我们必须配置TPDO通信参数。事件计时器设置间隔和抑制时间,以防止节点在发生更改时立即发送额外的数据。如果我没记错,我们还需要将180 n:2传输类型设置为异步(这听起来有违直觉)。
有了这样的设置,只有最近的事件才重要。最最新的数据将总是被发送,以固定的间隔。
https://stackoverflow.com/questions/73590579
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号