
创建自定义损失函数以最小化姿态误差
我想使用IMU (加速度计和陀螺仪)读数,通过神经网络计算姿态。输入为input_shape = (time steps, 6),输出为四元数形式的output_shape = (time steps,4)。
根据数学计算,参考四元数与预测四元数之间的误差为
y_pred[i,]=w0,x0,y0,z0
y_true[i,]=w1,x1,y1,z1
w = w0*w1 - x0*x1 - y0*y1 - z0*z1
x = w0*x1 + x0*w1 + y0*z1 - z0*y1
y = w0*y1 - x0*z1 + y0*w1 + z0*z1
z = w0*z1 + x0*y1 - y0*x1 + z0*w1
error_quaternion = [w, x, y, z]为了最小化错误,误差四元数(w)的标度部分必须最小化。(请忽略数学),为了达到最好的预测,w必须最小化(w是预测和参考姿态之间的最短角度)-
Ref = {Markley,F. Landis和John L. Crassidis.航天器姿态确定和控制的基本原理。第1286卷。美国纽约州纽约:2014年,纽约斯普林格。
我写了这个损失函数
def LossQuat2(y_true, y_pred):
a, b = y_true.get_shape()
error = []
for i in range(a):
w0,x0,y0,z0 = tf.unstack(y_pred[i,])
w1,x1,y1,z1 = tf.unstack(y_true[i,])
x1 = -x1
y1 = -y1
z1 = -z1
w = w0*w1 - x0*x1 - y0*y1 - z0*z1
error.append(2*tf.math.acos(K.clip(tf.math.sqrt(w*w), -1., 1.)))
return tf.reduce_mean(error)为了验证它是否真正计算了错误,我尝试了下面的代码,并精确地计算了错误。
w0,x0,y0,z0 = y_pred[i,]
w1,x1,y1,z1 = y_true[i,]
x1 = -x1
y1 = -y1
z1 = -z1
w = w0*w1 - x0*x1 - y0*y1 - z0*z1
error = 2*math.acos(K.clip(np.sqrt(w*w), -1., 1.))但使用该损失函数训练模型后,输出误差远大于MSE损失函数。而且,它比MSE慢。
- 为什么这个损失函数在数学上不能正确地减少错误?
- 如何减少损失函数的执行时间?
- 使用for循环函数是否正确?有什么方法可以删除for循环吗?
更新:
数学
四元数
四元数是四元数q=w x y z的姿态表示。
w是标量部分或实数部分。
x y z是向量部分或虚部。
此外,四元数可以写成:
q = [cos(theta/2) e*sin(theta/2)] , e is a unit vector (e=[i j k]- I打算用神经网络
估计四元数。
四元数逆
四元数逆或四元数共轭可以通过下列方法计算:
quaternion = [w x y z]
inverse(quaternion) = [w -x -y -z]四元数乘法
为了找出估计姿态和真实(参考)姿态之间的差异,估计姿态(NN输出)必须被四元数乘数乘以四元数基准。
四元数乘法:
q_m = q1 * inverse(q2)或
q_m = q2 * inverse(q1)两者都是一样的。
如果
q1=w0,x0,y0,z0
q2=w1,x1,y1,z1 然后,q_m = [w x y z]和它可以通过以下方法计算:
w = w0*w1 - x0*x1 - y0*y1 - z0*z1
x = w0*x1 + x0*w1 + y0*z1 - z0*y1
y = w0*y1 - x0*z1 + y0*w1 + z0*z1
z = w0*z1 + x0*y1 - y0*x1 + z0*w1q1和q2之间最短的角度是θ:
Theta = 2*acos(sqrt(w*w))我需要的是编写一个损失函数来最小化theta,如果θ= 0,w将等于1,那么最优的q_m是:
q_m=[1 0 0 0]感谢大卫-哈里斯@大卫-哈里斯:
def loss(y_true, y_pred):
z = y_true * y_pred * tf.constant([[1., -1., -1., -1.]])
wtot = tf.reduce_sum(z, axis=1)
return tf.reduce_mean(2*tf.math.acos(tf.math.sqrt(wtot*wtot)))它的速度要快得多,但它似乎减少了四元数的所有值,因此它不能正确工作。
**
很抱歉给你很多数学机会。
**
更新2
根据David的建议代码,我编写了以下代码:
def loss(y_true, y_pred):
z = y_true * (y_pred * tf.constant([1., -1., -1., -1.000000000]))
wtot = tf.reduce_sum(z,1)
return tf.reduce_mean(2*tf.math.acos(K.clip(tf.math.sqrt(wtot*wtot), -1.,1.)))此代码减少了损失,但MSE却成倍增长。我知道这段代码不会直接针对MSE进行优化,但是由于数学原因,MSE也必须减少。十世后
loss: 0.0124 - mse: 227.4045 基于自定义丢失的输出之一
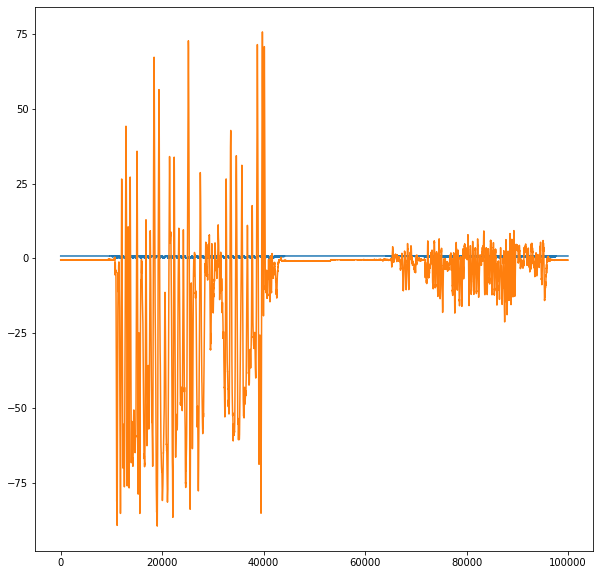
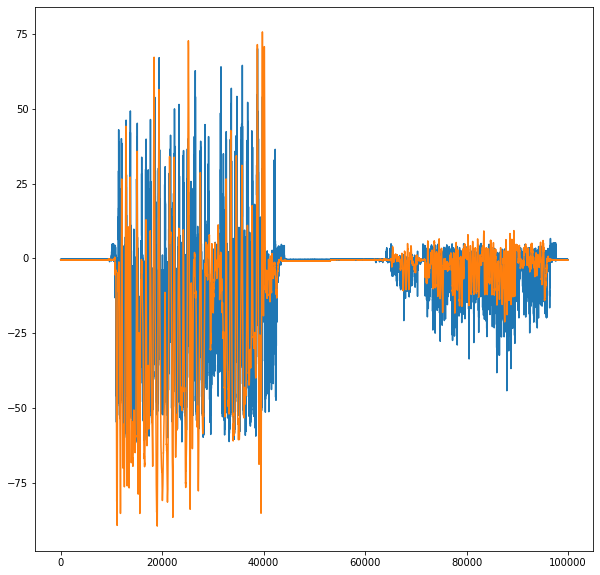
Orange = Reference
Blue =用NN估计
基于MSE损失函数的输出之一
回答 1
Stack Overflow用户
发布于 2022-08-16 13:41:45
您应该能够使用这种方法来矢量化(并加快)计算。(我不确定我是否所有的符号都是正确的-不明白为什么你的行“x1=-x1”在那里。)我暂时删除了“剪辑”部分,如果你想要的话,你需要把它放回去)
def loss(y_true, y_pred):
z = y_true * y_pred * tf.constant([[1., -1., -1., -1.]])
wtot = tf.reduce_sum(z, axis=1)
return tf.reduce_mean(2*tf.math.acos(tf.math.sqrt(wtot*wtot)))我看不出数学上的错误是什么,对不起
https://stackoverflow.com/questions/73374141
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号