
对象太快,不能在统一中发生冲突
对象太快,不能在统一中发生冲突
提问于 2022-06-08 09:15:59
我目前正在做一个模拟,磁盘被放置在传送带中,并按颜色分类。当传感器检测到一个白色磁盘时,一个矩形物体将传送带‘推’出一个盒子,它需要快速移动。然而,每当我们将速度设置为一个较高的数字时,它就会通过磁盘,而不推它们。我已经尝试过使推送对象的碰撞检测‘连续动态’(RigidBody)和磁盘‘冲突检测’‘连续’(如在这个视频:https://www.youtube.com/watch?v=XvrFQJ3n8Mo)。我已经附上了一个图像,机器人的上述部分的外观和设置的磁盘和推车对象。
磁盘和推送对象设置
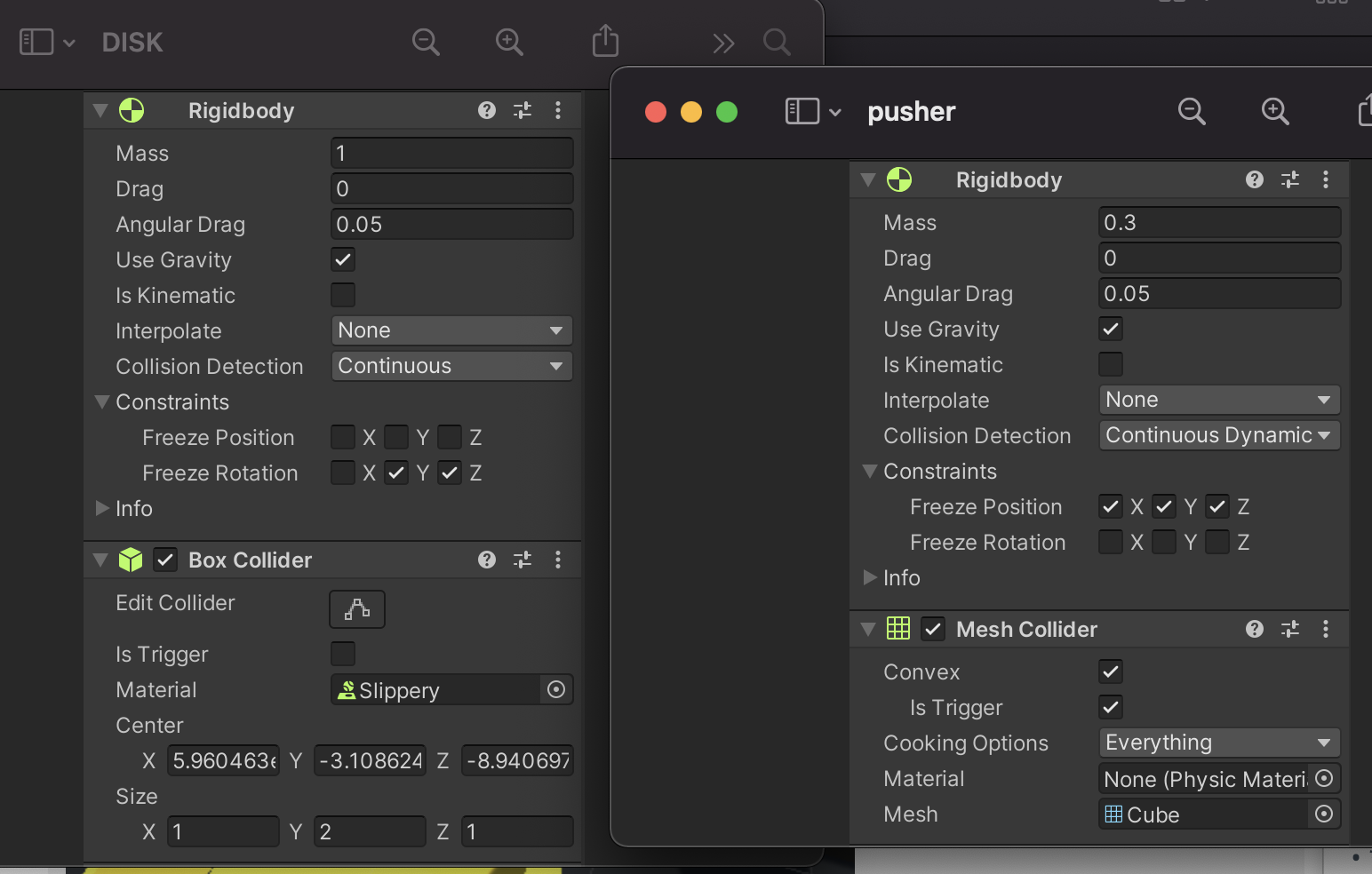
机器人仿真可视化

回答 1
Stack Overflow用户
发布于 2022-06-08 13:39:07
你的问题已经解决了,这里,简而言之,这是因为只有凸网对撞机才能相互碰撞。(你的右边是凸的,左边的不是)。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/72543090
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号