【Matlab 六自由度机器人】关于旋转的参数化(欧拉角、姿态角、四元数)的相关问题(附MATLAB代码辅助理解)

【Matlab 六自由度机器人】关于旋转的参数化(欧拉角、姿态角、四元数)的相关问题(附MATLAB代码辅助理解)

用户9613193
发布于 2026-06-16 20:25:55
发布于 2026-06-16 20:25:55
【Matlab 六自由度机器人】关于旋转的参数化的相关问题
- 往期回顾
- 前言
- 正文
- 一、欧拉角(Euler-angle)表示法
- 1. 定义
- 2. 代码解析(含实例)
- 二、姿态角(RPY)表示法
- 1. 定义
- 2. 代码解析(含实例)
- 三、四元数(axis/angle)表示法(未完待续)
- 1. 定义
- 2. 代码解析(含实例)
- 总结
- 参考文献
往期回顾
【主线】
【补充说明】
前言
在本文中,将推导三种方式来表达任意旋转,其中每种方式仅需三个独立变量:欧拉角表示法、姿态角表示法(滚动-俯仰-偏航)及四元数表示法(转轴/角度)。
以下是本篇文章正文内容,包含对欧拉角表示法、滚动-俯仰-偏航表示法及转轴/角度表示法定义的理解和相关代码的分步解析。
正文
一、欧拉角(Euler-angle)表示法
1. 定义
表示旋转矩阵的一种常用方法是使用欧拉角,其中有三个独立变量。考虑固定坐标系
,以及旋转后的坐标系
。 我们可以使用三个欧拉角(
)来表示坐标系
相对于坐标系
的姿态,它们通过下列三个连续旋转得到。首先,绕当前
轴旋转角度
。然后,绕当前
轴旋转角度
。最后,绕当前
轴旋转角度
。
注意!这里的旋转均是绕旋转后的坐标系来进行旋转
根据上述描述的旋转,列出以下旋转的对应矩阵。
通过上述的矩阵按右乘的顺序来进行乘积,得到旋转变换后的旋转矩阵为:
方程中的矩阵
被称为
欧拉角变换。
2. 代码解析(含实例)
代码如下:
syms phi theta psi
R1 = rotz(phi)*roty(theta)*rotz(psi);由于需要使用
函数来将旋转可视化,因此在这里设欧拉角
的角度均为
。
为参考系矩阵,
以
为参考系矩阵,做
的旋转。
syms phi theta psi
R0 = rotz(0);
R1 = rotz(pi/6)*roty(pi/6)*rotz(pi/6);
trplot(R0,'color','r','frame','0')
hold on
trplot(R1,'color','b','frame','1')得到结果如下:
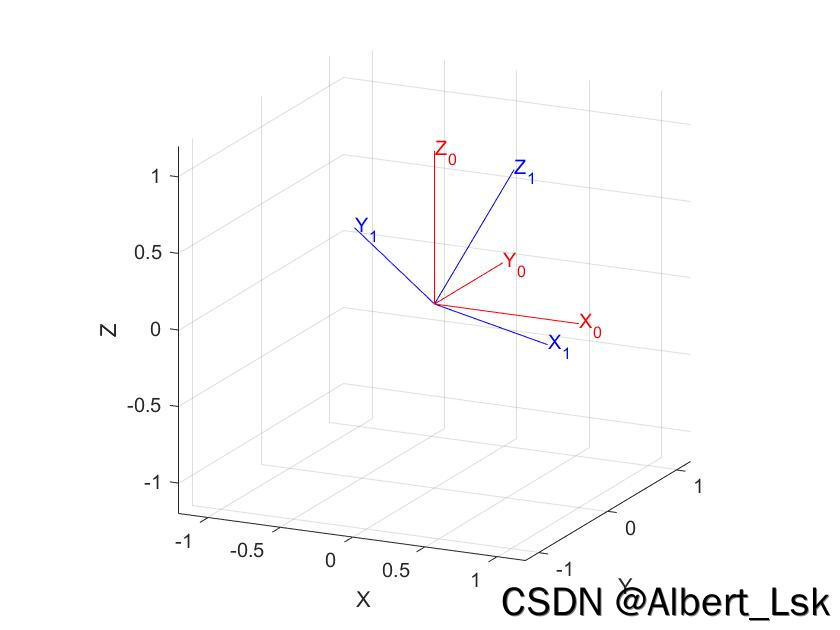
Alt
二、姿态角(RPY)表示法
滚动(roll)-俯仰(pitch)-偏航(yaw)表示法
1. 定义
旋转矩阵
也可以被描述为按特定次序进行的一系列关于主坐标轴
轴旋转的产物。这些旋转决定了滚动(roll)、俯仰(pitch)、偏航(yaw) 角度,在这里我们将定义以下规则。
- 绕
轴旋转的
角度的动作称为滚动(roll)
- 绕
轴旋转的
角度的动作称为俯仰(pitch)
- 绕
轴旋转的
角度的动作称为偏航(yaw))
我们指定旋转按照
的顺序进行,换言之,首先绕
轴旋转角度
,然后绕
轴旋转角度
。最后,绕
轴旋转角度
。
注意!这里的旋转均是绕固定坐标系
来进行旋转 根据上述描述的旋转,列出以下旋转的对应矩阵。
通过上述的矩阵按左乘的顺序来进行乘积,得到旋转变换后的旋转矩阵为:
2. 代码解析(含实例)
代码如下:
syms phi theta psi
R2 = rotz(phi)*roty(theta)*rotx(psi);三、四元数(axis/angle)表示法(未完待续)
转轴/角度(axis/angle)表示法
1. 定义
旋转并不总是关于主坐标轴而进行的。我们通常感兴趣的是关于空间中某任意轴线的旋转,这不仅提供了一种描述旋转的简便方法,并且提供了对于旋转矩阵的另一种参数化方法。 令
表示坐标系
内的一个单位向量,它定义了一个转轴,在此推导旋转矩阵
来表示关于次轴线的转角为
的旋转。
2. 代码解析(含实例)
在MATLAB中使用
函数来实现坐标系绕任意轴线旋转。 代码如下: 参考Quaternion
总结
以上就是关于旋转的参数化(欧拉角、姿态角、四元数)的内容,本文详细介绍了如何理解欧拉角、姿态角、四元数,提供了代码辅助理解旋转的参数化的特性。
参考文献
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2022-04-09,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号