桁架机器人、直角坐标机器人、龙门机器人(龙门桁架机械手)、笛卡尔机器人有什么差别?
原创
桁架机器人、直角坐标机器人、龙门机器人(龙门桁架机械手)、笛卡尔机器人有什么差别?
原创
桁架机械手陈工
发布于 2026-03-17 10:48:23
发布于 2026-03-17 10:48:23
图片
这些术语在工业自动化中经常重叠,甚至在某些语境下可以互换,但它们在结构设计和应用规模上确实存在细微差别。
简单来说,它们的关系是:笛卡尔机器人是“学名”(大类),其他三个是根据支撑结构和安装形态衍生出的“俗称”,国内桁架机械手叫法比较多。
1. 笛卡尔机器人 (Cartesian Robot) / 直角坐标机器人
这是同一个概念。
- 核心定义: 沿着 X、Y、Z 三个相互垂直的线性轴运动的机器人。
- 特点: 运动轨迹是直线,逻辑简单,控制容易。
- 关系: 它是所有这类机器人的总称。
图片
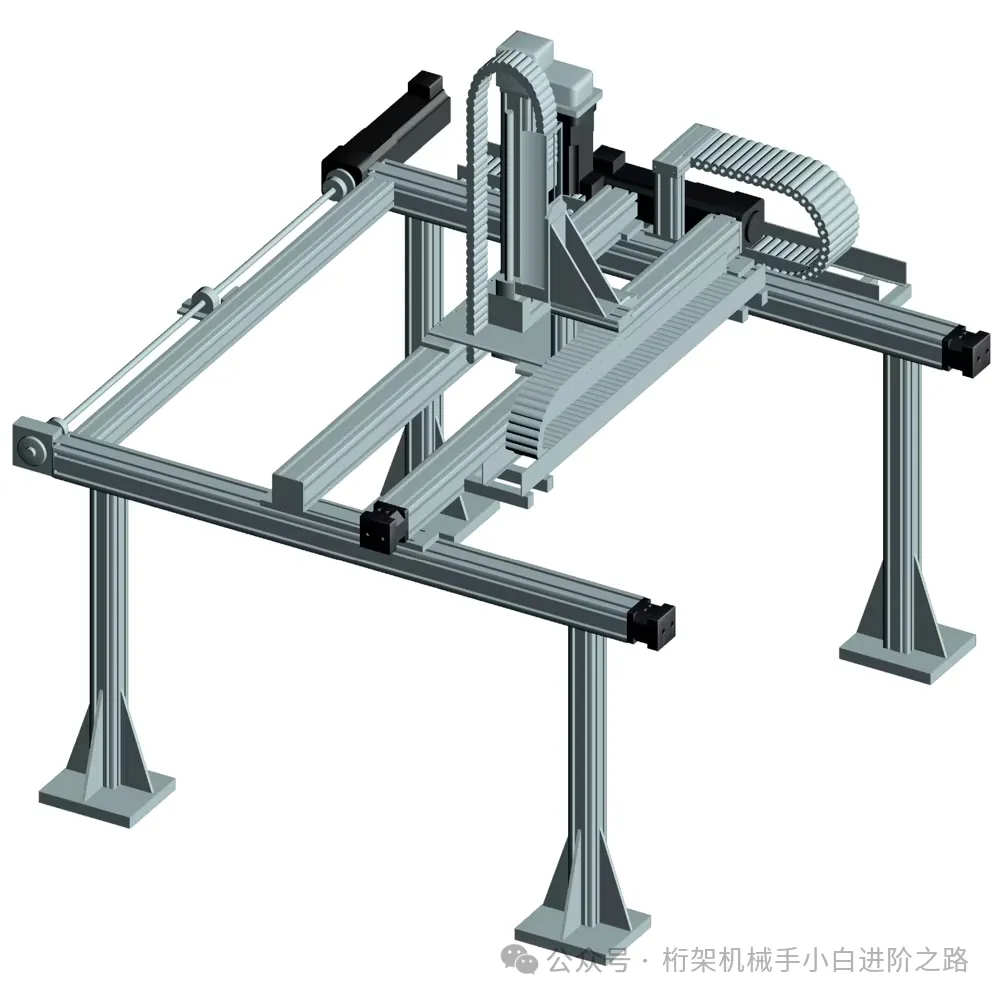
2. 龙门机器人 / 龙门机械手 (Gantry Robot)
- 结构特征: 像一扇“门”。它通常由两根平行轨道支撑横梁(X轴),小车在横梁上移动(Y轴),垂直轴(Z轴)下挂。
- 差别: 它是架在空中的,下方空间完全敞开。
- 优势: 适合大跨度、高负载。比如搬运大型汽车零部件、码垛整盘货物。

图片
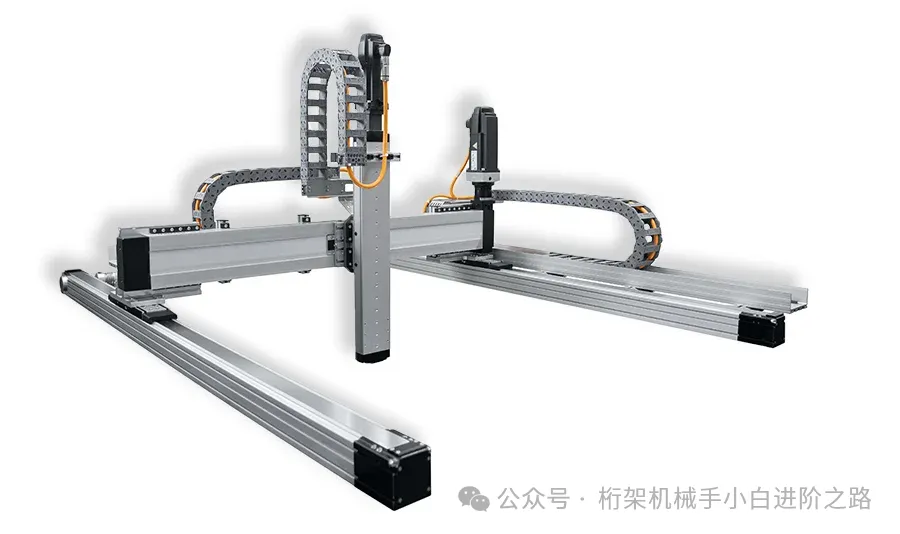
3. 桁架机械手/桁架机器人 (Truss / Overhead Robot)
- 结构特征: 本质上也是龙门式,但在国内习惯称固定在钢结构支架上的搬运系统为“桁架”。
- 差别: 更多强调“轨道”的概念。常见于数控机床的自动上下料,机器人像吊车一样在机床上方的一根或两根横梁上滑行。
- 应用: 它是工厂自动化产线最常见的形式,主要负责点对点的快速输送。

图片
名称对比
名称 | 核心区别点 | 形象比喻 |
|---|---|---|
直角坐标/笛卡尔 | 技术定义的统称 | 数学模型 |
龙门机器人 | 双边支撑,跨度大,力气大 | 大型龙门吊 |
桁架机械手 | 侧重于工厂产线上下料搬运码垛 | 产线上的搬运工 |
总结: 如果三个轴搭在一起在桌面上用,叫直角坐标机器人;如果是架在半空中跨度很大,叫龙门机器人;如果是专门吊在机床上方跑来跑去抓零件,通常叫桁架机械手。
深度视角:它们为什么会并存?
维度 | 笛卡尔/直角坐标系 | 龙门(Gantry) | 桁架(Truss) |
|---|---|---|---|
底层逻辑 | 纯数学(解析几何) | 土木工程(桥梁结构) | 机械设计(轨道与传动) |
演进动力 | 精准定位 | 大负载、稳健 | 腾挪地面空间 |
经典场景 | 3D 打印机、点胶机 | 激光切割、飞机复材铺放 | 汽车变速箱产线、数控机床 |

图片
- 笛卡尔是机器人的“灵魂”(算法基础);
- 龙门是机器人的“骨架”(宏大叙事);
- 桁架是机器人的“肌肉”(高效干活)。
随着碳纤维材料和直线电机技术的发展,现在的界限越来越模糊:高精度的桁架看起来像龙门,而轻量化的龙门又被称为笛卡尔系统。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号