中山大学联合中国电建:基于大疆M300无人机自动巡检风电叶片,120次实飞成功率98.3%
原创
中山大学联合中国电建:基于大疆M300无人机自动巡检风电叶片,120次实飞成功率98.3%
原创
CoovallyAIHub
发布于 2026-03-16 09:41:45
发布于 2026-03-16 09:41:45
导读
风电叶片在恶劣天气下易受损,需定期巡检。传统方式依赖人工操作,效率低且存在安全风险;现有无人机自动巡检方案则面临两个难题——叶片停止角度估计易受背景干扰,拍摄过程中叶片区域曝光难以控制。
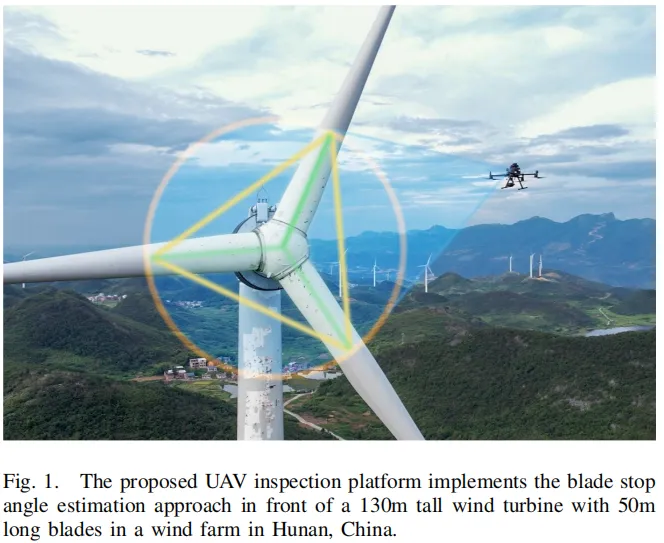
中山大学智能系统工程学院联合中国电建中南院,提出了一套从硬件平台到算法的完整方案:基于 DJI M300 搭建巡检平台,利用 LiDAR 点云几何方法替代传统视觉方案估计叶片停止角度,并在拍摄过程中实时调节曝光以保留叶片表面细节。方案在 5 个实际运营风电场、10 种风机型号、120 次飞行中完成验证,角度估计平均误差 1.15°,成功率从视觉方法的 69.2% 提升至 98.3%。
论文标题: Automated UAV-based Wind Turbine Blade Inspection: Blade Stop Angle Estimation and Blade Detail Prioritized Exposure Adjustment作者: Yichuan Shi, Hao Liu, Haowen Zheng, Haowen Yu, Xianqi Liang, Jie Li, Minmin Ma, Ximin Lyu 机构: School of Intelligent Systems Engineering, Sun Yat-sen University; PowerChina Zhongnan Engineering Corporation Limited 论文链接: arXiv:2507.04922v2
一、风电叶片自动化巡检面临哪些挑战?
图片
图片来源于原论文
无人机自动化巡检风电叶片已成为趋势,但要真正实现"无人值守"的自动巡检,仍面临三个核心挑战:
1.1 巡检平台设计需求
自动化巡检场景对无人机平台提出了严苛要求:
需求 | 说明 |
|---|---|
长续航 | 大型风机高达130米、叶片长50米,需保持10米以上安全距离、2m/s以下飞行速度 |
高抗风 | 风电场风力干扰强,需要足够的控制力和扭矩 |
大范围感知 | 宽阔空间和长叶片要求远距离感知能力 |
高质量拍摄 | 后续缺陷检测依赖清晰、亮度适当的图像 |
高算力 | 需处理大量感知数据和复杂导航规划算法 |
1.2 停桨角估计的鲁棒性
巡检时风机转子需由制动系统停止。叶片停止的角度(塔筒与右侧第一个叶片之间的夹角)是不确定的,因为叶片只能被风被动推转。准确估计停桨角对于后续航线规划至关重要。现有视觉方法(如霍夫变换检测叶片线条)容易受到背景山体、建筑等干扰,导致估计不准或失败。
1.3 叶片区域曝光控制
巡检拍摄过程中,阳光和相机角度变化会导致叶片区域与背景之间出现亮度差异。市售相机的自动曝光功能优先考虑整体画面亮度,而非叶片区域,可能导致叶片过曝或欠曝,丢失关键缺陷细节。丢失的细节无法通过后处理恢复。目前尚无针对巡检拍摄过程中实时叶片优先曝光调节的研究。
二、怎么做:一套从硬件到算法的完整巡检方案
2.1 巡检平台
论文基于 DJI M300 无人机搭建巡检平台,主要配置如下:
组件 | 型号/参数 | 功能 |
|---|---|---|
无人机 | DJI M300 | 30分钟续航、12m/s抗风、障碍感知 |
LiDAR | Livox MID-360 | 70米感知范围,用于3D点云采集 |
云台相机 | DJI H20T | 2000万像素,支持相机朝向和曝光参数调节 |
机载计算机 | Intel NUC11TNKi5 | 4核8线程 4.20GHz CPU,64GB 内存 |
LiDAR 以俯仰角 α = −23° 安装,提供 60°×60° 的前方点云感知视场角。机载计算机外装3D打印保护壳,防雨防沙。
2.2 基于费马点的停桨角估计
图片
图片来源于原论文
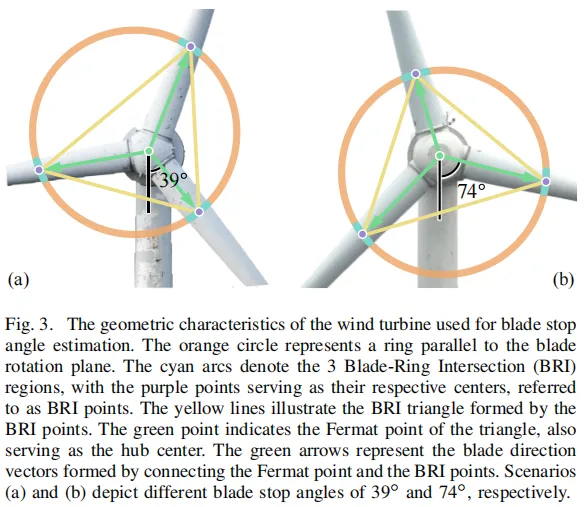
这是论文的核心技术贡献。方法利用风机叶片固有的 120° 间距几何特性,通过 LiDAR 点云而非视觉图像来估计停桨角,从根本上避免了背景干扰。
核心思路: 风机的三个叶片固定间隔 120°,论文利用这一几何特性来定位轮毂中心。具体而言,用一个平行于叶片旋转平面的圆环与三个叶片相交,得到三个叶片-圆环交叉区域(BRI),以其中心构成三角形。由于三叶片等间距 120°,该三角形的费马点(即到三个顶点距离之和最小的点)恰好与轮毂中心重合。
算法流程:
- 旋转平面提取:无人机悬停在风机前方,LiDAR 采集点云,用 RANSAC 拟合得到叶片旋转平面及其法向量;
- 环形区域搜索与聚类:从无人机位置沿法向量方向逐步搜索,在概率栅格地图上查找与叶片空间结构重叠的区域(BRI 区域),然后用 DBSCAN 聚类为3组,每组中心即为一个 BRI 点;
- 费马点优化:以三个 BRI 点构成三角形,求取费马点作为轮毂中心的最优估计,连接费马点与 BRI 点得到叶片方向向量,计算停桨角;
- 迭代收敛:重复上述过程,当相邻两次估计的角度差小于收敛阈值 εa 时输出最终结果。
论文选择概率栅格地图(而非直接使用点云)作为空间表示,原因有二:栅格查询时间复杂度为 O(1),优于 KD-Tree 的 O(log n);且与后续基于栅格的轨迹规划兼容。
2.3 叶片细节优先曝光调节
方法的核心思路是在拍摄过程中实时确定叶片上的当前巡检点,将其投影到图像上作为曝光参考点,根据参考区域的亮度调节相机曝光参数。
具体步骤:
- 提取巡检点:对 LiDAR 采集的叶片点云用 RANSAC 拟合叶片中心线,从无人机位置向中心线作垂线,垂足即为当前巡检点。同时调整云台朝向垂线方向,确保叶片居中;
- 投影到图像:通过透视投影将巡检点从世界坐标系投影到图像坐标系,作为曝光调节的参考点;
- 调节曝光:以参考点为圆心构建圆形参考区域,计算区域内灰度均值 µg。若 µg > µmax(过亮),降低曝光参数;若 µg < µmin(过暗),增加曝光参数。调节步长为 kµ。
三、5座风电场、120次实飞:方法效果如何?
实验在5个实际运营风电场中进行,涵盖10种风机型号,完成120次飞行。测试温度范围 5°C 至 33°C,最大风速达 12m/s。
3.1 停桨角估计
论文将所提方法与视觉基线方法(基于霍夫变换和投票算法的叶片线检测)进行对比:
指标 | 视觉基线 | 本文方法 |
|---|---|---|
平均角度误差 | 2.14° | 1.15° |
成功率 | 69.2% | 98.3% |
关键分析:
- 视觉方法受背景山体和风机塔筒干扰,导致叶片识别偏差;在复杂背景(如村庄)下,投票算法甚至无法识别叶片,导致估计完全失败;
- 本文方法基于 LiDAR 点云在叶片旋转平面上搜索叶片空间结构,不受背景视觉因素和塔筒影响;
- 120次测试中仅出现2次失败:一次因浓雾影响 LiDAR 对叶片结构的感知,另一次因轮毂位置先验估计误差过大,环形搜索未能提取 BRI 区域。
3.2 曝光调节
图片
图片来源于原论文
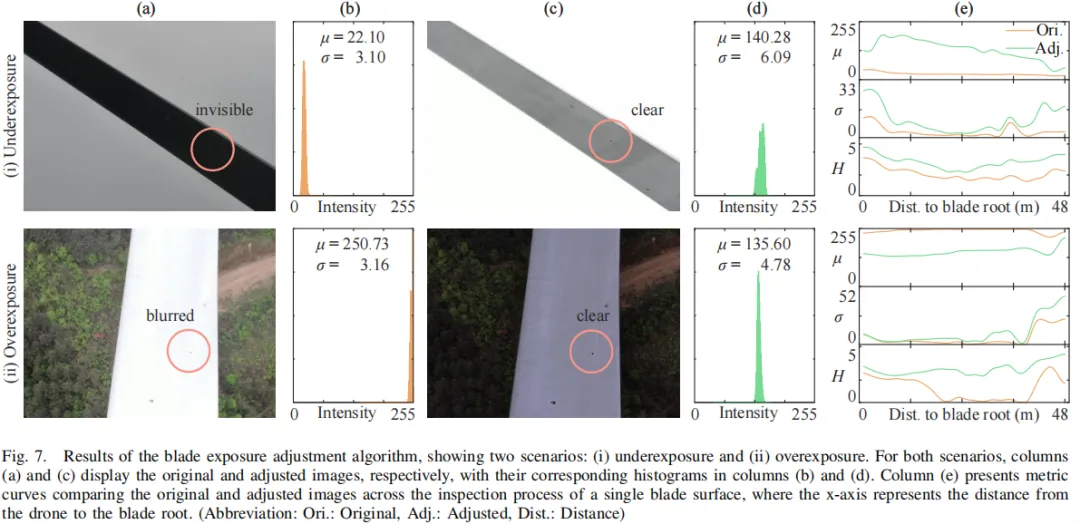
实验在晴天、多云和阴天条件下进行,分别测试欠曝和过曝场景。评估指标包括叶片区域灰度均值 µ(亮度)、标准差 σ 和熵 H(细节丰富度)。
场景 | 指标 | 原始图像 | 调节后图像 |
|---|---|---|---|
欠曝 | 均值 µ | 25.48 | 133.27 |
欠曝 | 标准差 σ | 2.48 | 7.91 |
欠曝 | 熵 H | 2.10 | 3.28 |
过曝 | 均值 µ | 245.64 | 150.85 |
过曝 | 标准差 σ | 5.46 | 10.25 |
过曝 | 熵 H | 1.23 | 2.96 |
- 欠曝场景下,叶片区域亮度从 25.48 提升至 133.27,灰度范围扩展 97.0%,细节丰富度显著提升;
- 过曝场景下,亮度从 245.64 降至 150.85,灰度范围扩展 51.3%,细节丰富度同样显著改善;
- 偶尔在阳光快速变化时,曝光调节存在轻微延迟,导致少数连续帧出现短暂的过曝或欠曝。
四、方法优势与未来方向
优势
- 实际风电场验证:120次飞行、10种风机、5个风电场的大规模实地测试,而非仿真或缩比模型;
- LiDAR 替代视觉的鲁棒性:基于点云几何方法估计停桨角,从根本上消除了背景干扰问题,成功率从69.2%提升至98.3%;
- 费马点几何优化:利用三叶片 120° 间距的固有特性,通过费马点精确定位轮毂中心,平均误差仅 1.15°;
- 实时曝光调节:在拍摄过程中而非后处理阶段调节曝光,保留了无法通过后处理恢复的叶片细节;
- 完整平台方案:从无人机平台硬件(DJI M300 + LiDAR + 云台相机 + 机载计算机)到算法的完整解决方案。
未来方向
- 论文指出 2 次失败案例中有 1 次源于轮毂位置先验估计误差过大,未来将提升先验位置估计精度;
- 基于本文平台和方法,进一步开展更全面的风机参数估计、巡检飞行规划与控制,最终实现全自动化风电叶片巡检系统。
五、总结
本文针对风电叶片自动化无人机巡检中的三个核心挑战,提出了基于 DJI M300 的巡检平台、基于费马点的停桨角估计方法和叶片细节优先曝光调节方法。停桨角估计利用 LiDAR 点云和风机叶片 120° 间距的几何特性,通过费马点优化定位轮毂中心,在 120 次实际风电场飞行中实现了 1.15° 平均误差和 98.3% 成功率。曝光调节方法通过实时投影叶片巡检点到图像坐标系,在拍摄过程中动态调节曝光参数,在欠曝和过曝场景下均显著提升了叶片区域的细节丰富度。该研究受广东省粤港澳联合科技计划和国家自然科学基金资助。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
原创声明:本文系作者授权腾讯云开发者社区发表,未经许可,不得转载。
如有侵权,请联系 cloudcommunity@tencent.com 删除。
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号