范畴论的模型化系统架构认知-计算循环

范畴论的模型化系统架构认知-计算循环

CreateAMind
发布于 2026-03-11 17:48:16
发布于 2026-03-11 17:48:16
Category-Theoretic Formulation of the Model-Based Systems Architecting Cognitive-Computational Cycle
范畴理论的模型化系统设计认知-计算循环
https://www.mdpi.com/2076-3417/11/4/1945
简单总结:本文提出一个以范畴论为基础的整体性框架,用于复杂工程系统的概念建模。该框架将模型通用地表示为图数据结构,并从中生成面向利益相关者的视图(如矩阵和可视化图),进而对可视化信息进行推理,以完善和提升系统概念。这一迭代过程——由认知环节与计算环节组成——构成了基于模型的系统架构循环的重要表述。
摘要:我们提出了“概念→模型→图→视图循环”(CMGVC)。CMGVC 通过将概念模型转化为一种通用且健壮的图数据结构(GDS),促进一致的架构分析、推理、洞察与决策。随后,该 GDS 被转换为模型的多种视图,以不同方式向利益相关者传递信息。这种基于 GDS 的方法将视图与模型解耦,是对基于模型的系统工程(MBSE)的有力增强。CMGVC 运用了范畴论——一种关于表示与变换的数学框架——的严格基础。我们指出,建模语言本身就是范畴,并类比于编程语言。CMGVC 架构优于直接转换和语言绑定的通用表示方法。我们通过案例展示了 CMGVC 如何将使用对象过程建模语言(OPM)构建的概念系统架构模型,转换为对偶图和面向利益相关者的矩阵,从而激发系统架构的深层洞察。
关键词:基于模型的系统工程;范畴论;对象–过程方法;模型分析;概念–模型–图–视图循环;图数据结构
- 引言 模型通过捕捉人们构想并希望向他人表达和交流的思想、观察、观念、理论、洞见和意图来表征概念 [1]。概念模型利用建模语言的语法和语义来描述这些概念。一个广为人知的概念建模范例是艾萨克·牛顿对苹果从树上掉落的观察与思考,由此形成牛顿万有引力理论。模型作为理论在现象上的投影,用于表征科学概念;它们描述并抽象现象,同时依赖于可能是假设性或部分验证过的理论 [2]。同样,模型也用于表征当前或未来状态的人造工程系统 [3]。
模型反过来也能丰富概念:通过捕获、操作、情境化、组合和分析所建模的概念与方面,我们可以深化对概念本身、感知以及主题的理解。在复杂系统工程、开发与运行中,概念模型正扮演着日益核心且关键的角色。模型应能捕捉并表达各种关系与交互,而这些关系与交互对于理解解决方案、设计方案或运行流程至关重要。模型对于促进利益相关者之间的沟通与讨论同样重要。因此,“概念–模型”构成一个相互增强的二元系统。
基于模型的系统工程(MBSE)是模型在系统工程中的形式化应用 [4]。MBSE 推动了系统工程的数字化转型:在价值链上下游生成并传递数字化编码、可互操作的系统工程交付物 [5]。数字系统工程(DSE)日益依赖 MBSE,后者也正逐步从以模型为中心的实践,演变为以价值为中心的方法,并成为数字企业中系统工程的关键资产 [6–9]。
从基于模型的平台中为利益相关者创造价值,是 DSE 的主要预期成果。因此,将系统模型转化为可分析、可复用的制品、支持决策的信息以及机器生成的洞见,是对企业级 DSE 的关键贡献。文献 [10] 中定义的 DSE 生态系统架构将建模、基础设施、数据服务、仿真、测试、分析和存储库(MIDSTAR1)列为 DSE 的核心服务;而管理工具、互操作服务、数字表示、系统、实体、审计和报告服务(MIDSTAR2)则被视为主要接口。我们将模型经过处理或分析后产生的这类结果或制品统称为该模型的“视图”(views)。
基于模型的视图用于抽象、突出或聚焦特定方面,随着模型规模增大、复杂度提高,其重要性也日益凸显。通过观察、推理、处理、分析这些视图并据此做出决策,会持续推动概念的迭代更新 [11]。“概念–模型–视图”这一自我增强的三角循环扩展了原有的“概念–模型”二元关系。然而,建模语言(MLs)、模型和视图的潜在组合数量呈爆炸式增长:如果每个模型都需要映射到所有必要的视图,那么映射总数将是模型数量 M 与视图数量 V 的乘积,即 M·V。
在缺乏动态且健壮的模型到视图转换机制的情况下,人们对概念的理解受限于特定建模语言所绑定的视图。一种通用表示(GR)——各类建模语言可将其模型映射至该表示,而各类视图又可从该表示中生成——将带来根本性改变。图数据结构(GDS)可作为此类通用表示 [12–15]。GDS 简单、健壮、可扩展,并兼容关系型与图论算法。需注意,“图”(graph)与“图数据结构”(GDS)并非完全等同的概念:图是对 GDS 某个子集的可视化表示,而 GDS 是一种逻辑数据结构,用于表示关系,这些关系可通过图来展示。尽管如此,出于简洁性和直观性,本文常以“图”代指 GDS。对 GDS 的任意部分(无论原始或处理后)进行图形化呈现,本质上都是模型的一种视图。若能稳健地将模型转换为 GDS,并从 GDS 生成视图,便可实现模型与视图的互操作性和可互换性,并扩展支持模型分析的视图集合。“概念–模型–图–视图”的四元循环,相比“概念–模型–视图”三元组,有望成为一种更有效、更全面、更高效的认知–计算型概念建模与分析过程。从“概念–模型”二元组,经由“概念–模型–视图”三元组,最终演进为“概念–模型–图–视图循环”(CMGVC)的过程如图 1 所示。
矩阵是模型的一种有用视图。矩阵有助于分析定量和定性关系。矩阵是一种二维离散数据结构,适用于各种数学或逻辑分析。对于科学家、工程师和分析师而言,矩阵常见、直观且易于使用。尽管图形化建模语言(graphic MLs)不断发展,矩阵却并未成为正式的表示模态,尽管类似矩阵的结构或布局在某些建模框架中仍以某种形式存在。例如,IDEF0 符号提倡采用一种对角线排列的模块布局,类似于用于表示组件间依赖关系的 N2 矩阵 [16]。UML 活动图采用“泳道”(swimlane)布局,通过列来划分复杂的多方参与活动。序列图也采用了类似思路,使用垂直对齐的生命线作为输入和输出交互步骤的锚点 [17]。
简单矩阵是二维且非分层的。这种结构不足以描述复杂的架构。需求或结构元素通常是不对称层次结构中的叶节点,其深度和细节层级可能各不相同。因此,矩阵核心必须与行和列实体的分层表示相结合。系统工程中使用的高级矩阵表示包括验证交叉引用矩阵(Verification Cross-Reference Matrix, VCRM)、设计结构矩阵(Design Structure Matrix, DSM)和系统架构矩阵(System Architecture Matrix, SAM)。美国国防部架构框架(DoDAF)也在其部分视图中倡导使用矩阵 [18]。
我们将上述这类面向特定目的的高级矩阵统称为“利益相关者信息矩阵”(Stakeholder-Informing Matrices, SIMs)。SIM 指任何矩阵、类矩阵或基于矩阵的数据表示形式,其目的在于向利益相关者、决策者、分析师及其他读者提供信息,帮助他们进行推理、做出更优决策并采取有依据的行动。SIM 能够组织、汇总并情境化那些可能分散在多个模型或模型不同部分中的信息。
以往将模型表示为 SIM 的各种尝试,大多局限于特定模型、特定方面、特定建模语言或特定可视化形式(见第 2.3 节)。因此,亟需一个数学上严谨且稳健的框架,用于将模型转换为视图。事实上,由于模型是建模语言(ML)的实例化,而建模本身即是对 ML 模式的实例化,我们应当将 ML 的模式集合转换为一个可表示数据结构的超集,而非仅将某个具体模型转换为某个具体视图。
本文定义了 CMGVC(概念→模型→图→视图循环),并介绍了其所包含的认知与计算转换。我们的框架基于范畴论(Category Theory)[19]。一个数学范畴由对象(objects)和态射(morphisms)组成:对象代表类型,态射则是类型之间的映射。Curry–Howard–Lambek 对应关系指出,范畴、理论和编程语言在本质上是等价的,编写软件程序就如同定义一个范畴,也如同证明一个理论 [20,21]。Naur 曾指出,软件编程类似于理论构建,并强调应将底层知识和概念显式地编码到软件程序中,而非仅仅隐含于设计者的头脑之中 [22]。
范畴论中程序、概念与理论之间的等价性启发我们断言:建模语言就是范畴,而范畴内部及范畴之间的映射是实现各种应用场景下稳健模型转换的强大手段。这一断言为感知和实施概念转换(尤其是在复杂系统中)提供了一种形式化且整体性的方法。这种方法至关重要,因为它允许人们使用自己偏好的推理机制来理解复杂概念,而非受限于最初用于捕获这些概念的表示机制。在复杂系统中,这种“概念表示可互换性”的理念对于实现范式转变、统一建模与推理实践,以及推动数字系统工程 [10] 具有关键意义。
本文在多个方面推动了当前技术的发展: (a) 断言并证明建模语言是范畴; (b) 利用范畴论为新兴的基于模型的系统工程(MBSE)范式提供坚实的理论基础,而非以范畴论或其他代数表示方法取代现有的系统表示与分析方法; (c) 从概念的初始萌芽,经由建模、通用表示到信息呈现,提供一个贯穿概念全生命周期、形态演变与演化的整体性系统视角; (d) 提供数学证据,证明该方法优于直接映射和语言绑定的映射方式; (e) 协同融合范畴论、图论、建模理论、系统理论与信息学,构建一个多维度的表示、转换与可视化流水线,这是数字工程范式的关键基石; (f) 提供一个具体的概念转换循环实例:将基于对象–过程方法(Object–Process Methodology, OPM)构建的概念模型转换为图数据结构,并进一步将图数据结构转换为面向利益相关者的信息矩阵,这一过程显著更具结构性和鲁棒性,不仅支持对 OPM 模型的更多可视化形式,也支持将其他建模语言(MLs)的图结构以矩阵形式进行可视化。
本文其余部分组织如下:第 2 节回顾相关工作,并介绍相关的建模语言、图论和范畴论;第 3 节描述实施 CMGVC 的方法;第 4 节简要介绍该框架的软件实现;第 5 节对框架进行评估;第 6 节展示我们的方法;第 7 节讨论结果;第 8 节给出结论,并展望潜在、正在进行及未来的研究方向。
- 相关工作 我们回顾构建稳健的 CMGVC 所必需的方法、理论和概念。第 2.1 节介绍本研究中所采用的建模语言——对象–过程方法(Object–Process Methodology, OPM);第 2.2 节简要回顾图论中的基本概念及图数据表示;第 2.3 节讨论面向利益相关者的信息矩阵(SIMs)在系统工程中的应用;第 2.4 节回顾范畴论,特别是其在系统工程和基于模型的系统工程(MBSE)中的应用及相关衍生工作;第 2.5 节讨论模型到图的转换。
2.1 对象–过程方法(OPM)
OPM 是一种主流的建模语言(ML)和 MBSE 框架 [4],已被标准化为 ISO 19450 [23],并在学术界和工业界数千项研究中得到应用。OPM 基于一个极简的通用本体,包含对象(存在的事物)、状态(用于刻画对象)、过程(发生的事件)以及它们之间的关系。OPM 具有可视化模态和文本化模态。其可视化表示是一组层次化组织的对象–过程图(Object–Process Diagrams, OPDs)。所有 OPD 均使用相同的符号体系,这意味着 OPM 仅有一种图表类型,却能同时容纳结构性、过程性和功能性方面。
在 OPM 的可视化模态中,矩形表示对象,椭圆形表示过程,圆角矩形(“rountangles”)表示状态,另有少量其他形状和符号用于表示各类关系。
OPM 的文本表示采用对象–过程语言(Object–Process Language, OPL)——一种类自然语言。每个 OPL 句子对应一个 OPD 构造(即一组关联的实体),反之亦然。OPL 是形式化的、机器可读的,并采用颜色编码。一个完整的模型级 OPL 规约(OPL Specification, OPS)由一组互不重复的 OPL 句子组成,无论这些句子在不同模型图中出现多少次,在 OPS 中仅出现一次。因此,模型中任何一处所作的陈述在整个模型范围内均有效。这使得建模者无法在同一模型的不同位置指定两个语法上相互矛盾的语句。模型的逻辑数据表示以与图形无关的方式捕获所有实体和关系,而图形引擎则根据图形规范渲染可视化表示。
OPM 已被广泛应用于系统架构与设计、利益相关者参与与沟通以及概念验证 [3,24–27]。OPM 模型可使用 OPCloud(一种基于云的建模工作室)轻松构建 [28]。OPCloud 已应用于医学 [29]、工业 [30]、航空航天 [31] 和数字化转型 [10] 等领域。我们在本研究中使用 OPCloud 构建模型并生成规约,随后对这些规约进行了独立分析。
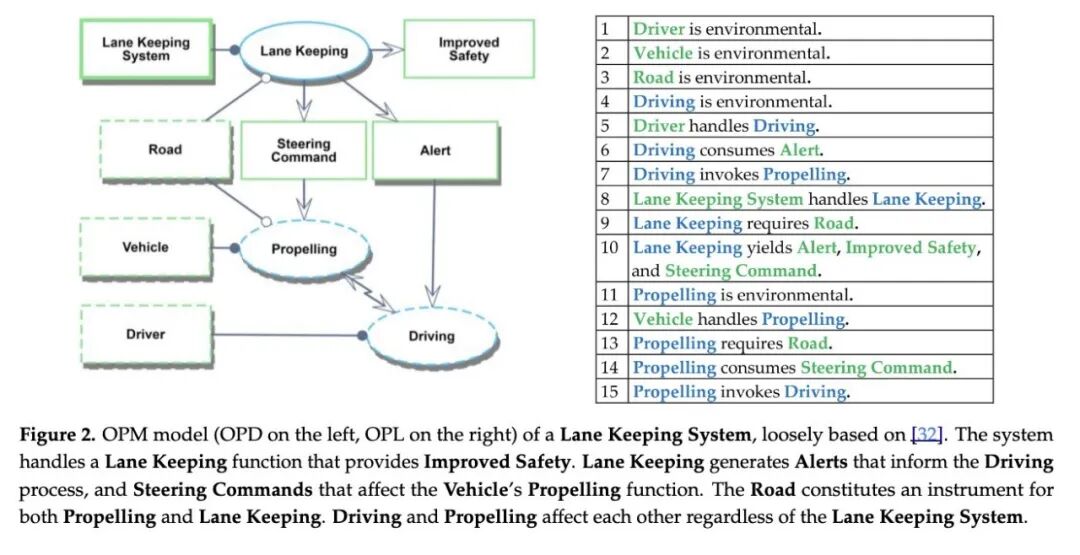
图 2 展示了一个基于福特公司概念 [32] 的乘用车车道保持系统(Lane Keeping System)的 OPM 模型。
2.2 图数据结构(GDS)
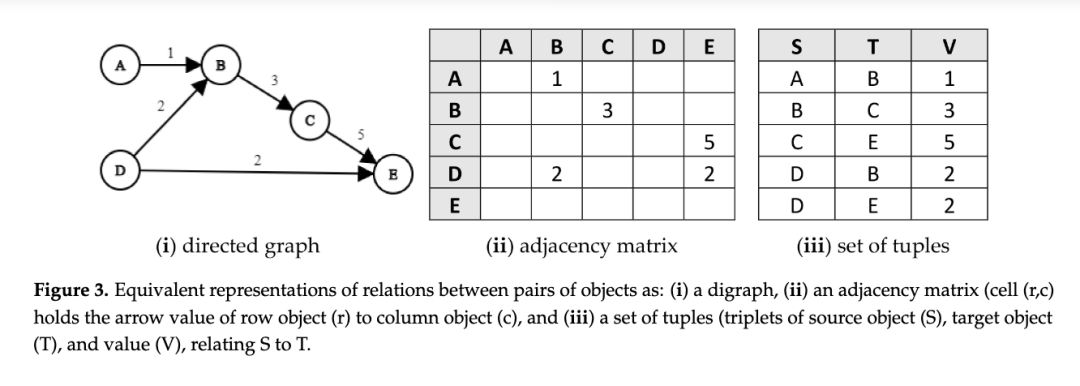
图是由一组节点(顶点)构成,节点之间通过弧(边)连接成对。在有向图(digraph)中,边具有方向(因此常被称为“箭头”),例如三元组 <N₁, R, N₂> 可读作:“N₁ 通过 R 关联到 N₂”、“R 将 N₁ 连接到 N₂”,或“R 的方向是从 N₁ 到 N₂”。箭头可以具有类型、值及附加属性。图 3i 展示了一个简单的有向图,其中包含一种类型的箭头和一个值索引。图可呈现为多种表示形式与可视化方式,包括矩阵。图 3ii 将图 (i) 表示为邻接矩阵:矩阵的行和列代表图中的节点,单元格则代表边的值或标签。
图也可表示为扁平化的三元组集合 <S, T, V>,其中 S 为源节点,T 为目标节点,V 为值,如图 3iii 所示;或表示为 <R, S, T> 三元组,其中 R 为关系。图数据结构(GDS)是一组三元组 <R, S, T>,可能还包含身份标识、值等附加三元组属性。
2.3 利益相关者信息矩阵(SIM)
我们回顾若干关于 SIM 理论与应用的示例,包括设计结构矩阵、多域矩阵、系统架构矩阵和数据透视表。
美国国防部架构框架(DoDAF)鼓励在某些视图中使用矩阵 [18]。然而,对于矩阵的结构或布局并无正式要求。在某些情况下,“矩阵”一词被用于描述本质上并非矩阵的表格结构。例如,一个包含若干属性的输入表就不是真正的矩阵。统一架构框架(UAF)是 UML 的一种基于模型的扩展,也是 DoDAF 的一个剖面 [33]。UAF 主张将架构规范中可追溯至操作规范、服务、资源、标准、活动等方面的要素表示为矩阵;但目前尚无数据结构或图示说明如何从这些剖面中提取矩阵。
设计结构矩阵/依赖结构矩阵(DSM)是分析相互关联方面、促进理解与决策的强大工具 [34]。将模型转换为 DSM 的研究见于文献 [35–37]。DSM 要求明确界定行与列的本体(ontology)。这对于语义本体而言并非易事,因为语义本体需反映所建模的系统或领域。
多域矩阵(MDM)通过在每个维度上包含多个集合并组合多个矩阵来扩展 DSM [38,39]。由于规模庞大,MDM 构建和可视化都较为困难。MDM 需要以下底层定义:(a) 一套单一的超集概念术语;(b) 所有集合对之间的集合到集合映射;(c) 每对集合成员之间的成员到成员映射。
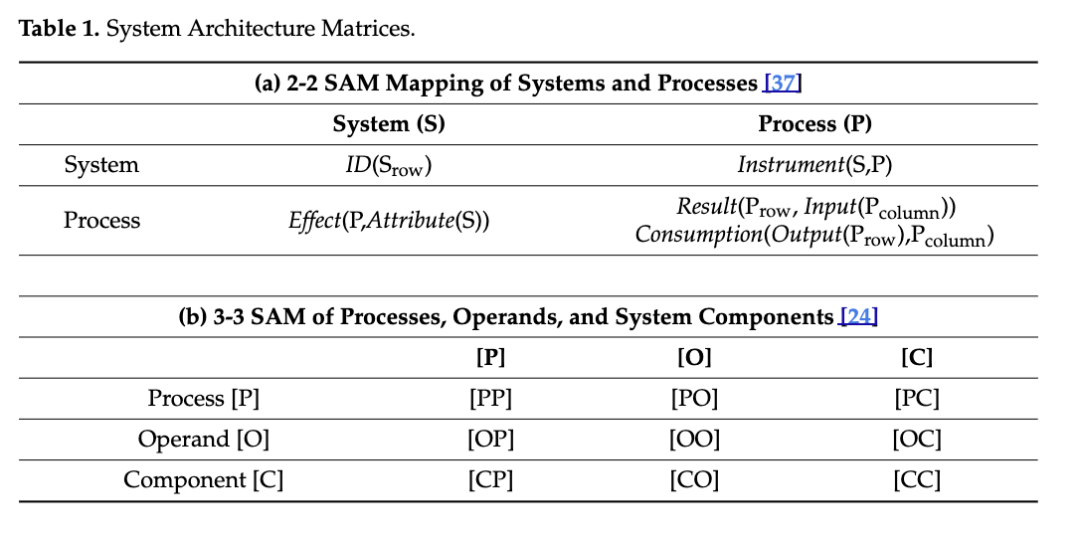
系统架构矩阵(SAM)是专用于系统架构分析的特殊 MDM,例如一种二维 SAM,其映射关系为 {系统, 过程} → {系统, 过程} [37]。映射关系可根据所需分析按子 SAM 确定。示例见表 1a。映射关系“工具(Instrument)、效应(Effect)、生成(Generation)、消耗(Consumption)”源自 OPM 关系集。此外,“属性(Attribute)、输入(Input)、输出(Output)、标识(ID)”等映射被定义为间接但更直观的关系。例如,Attribute(S) 是参与 Exhibition(S,Eᵢ) 或 Characterization(Eᵢ,S) 关系的一组模型实体 Eᵢ;Input(P_column) 是与 P_column 存在 Instrument(Eᵢ,P_column) 或 Consumption(Eᵢ,P_column) 关系的一组实体 Eᵢ。一个由过程、操作数(输入、资源和输出)及组件构成的 3×3 SAM 示例见表 1b,依据文献 [24]。每个子 SAM 均有一个关系,用于确定行项如何关联列项,该关系可以是静态或动态的。矩阵中的一个“行–单元格–列”三元组可读作:<行项 (iRow)> <单元格项 (iRow, iCol)> <列项 (iCol)>。例如:[过程 P2] 需要 [操作数 O2];[组件 C3] 展示 [过程 P2]。
将模型实体分类为集合成员(过程、操作数、组件)是一个挑战。定义语法类型的建模语言可简化类型对应集合成员的识别。然而,问题域或解决方案域可能包含超出该建模语言语法的类型。即使是“利益相关者(Stakeholder)”和“操作数(Operand)”等常见术语,在像 SysML [40] 这类语法丰富的建模语言中也未被包含。
以语义方式定义关系(例如,将整体–部分关系视为组织结构、活动分解或产品分解)虽具挑战性,但对于 SIM 的构建却至关重要。
自动生成 SIM 是另一大挑战。将模型数据转化为可分析的矩阵表示形式绝非易事。它要求将任何模型转换为一种统一、通用、与语言无关的表示形式,这种形式必须足够稳健,能容纳任何特定领域的语法和语义,并具备足够的能力支持各种分析 [35,38]。
数据透视表是强大的数据分析工具,通常用于聚合、汇总、聚类、切片和分块关系型数据。它们广泛应用于商业智能领域,常作用于按时间、地理、身份、组织单位等分类的操作数据集。数据透视表嵌入于 Microsoft Excel 和 Google Sheets 等常用电子表格工具中。其强大之处在于允许分析师动态调整原始数据集的视角、试验不同视角并获得富有洞察力的配置。但在系统工程领域,数据透视表较为罕见 [41–43],这或许是因为系统工程师缺乏足够的数据分析背景。
2.4 范畴论在系统工程中的应用
2.4.1 什么是范畴?
范畴论是一种抽象数学形式化体系,用于描述和处理数学或可数学化的概念的结构与变换。数学范畴是由对象(objects)和态射(morphisms)组成的抽象结构。对象是实体的类型,态射则映射对象之间。我们将使用“类型”(type)这一常用术语代替“对象”,因为在编程和工程中,“对象”的语义更倾向于实例而非类。一个态射 m: X → Y 具有定义域 X 和陪域 Y,二者均为类型,并将每个 x ∈ X 映射到某个 y ∈ Y。如果前一个态射的陪域等于后一个态射的定义域,则这两个态射可以复合:

一个包含三种类型、两个显式态射和一个复合态射的范畴,如图4所示。
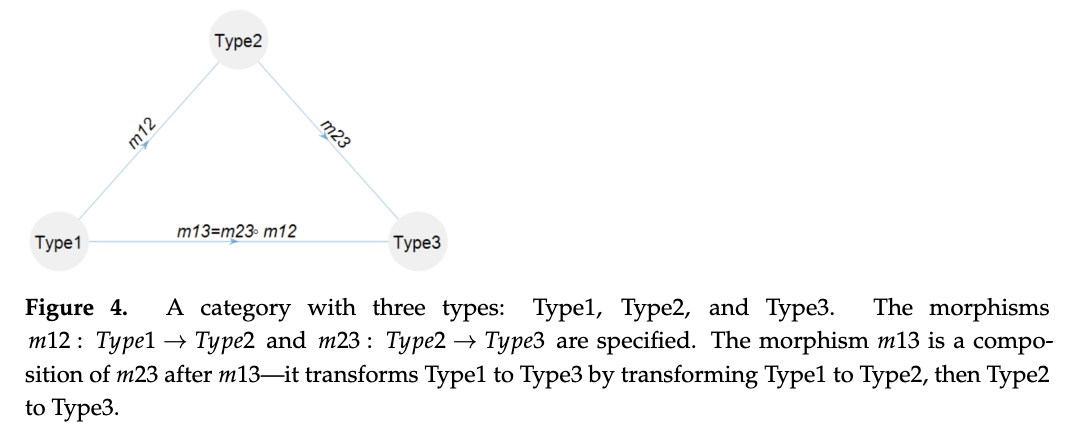
态射 m: X ⊗ Y → Z 表示将两种类型的笛卡尔积映射到第三种类型。它将每个 x ∈ X 与 y ∈ Y 的组合映射为 z ∈ Z。Z 可以是任意结构,包括多维元组或张量。函子(Functor)是从一个范畴到另一个范畴之间保持结构的映射。函子是代数中函数的范畴论等价物。函子 F: C₁ → C₂ 将范畴 C₁ 中的类型和态射映射为范畴 C₂ 中的类型和态射。从一个范畴到另一个范畴定义函子,对于建立科学与工程理论的范畴论基础至关重要,因为它将某一理论域中的概念映射到更适合处理的陪域概念中。
2.4.2 系统、模型与范畴之间有何关联?
Curry–Howard–Lambek 对应关系 [20,21] 断言,编程语言和类型系统本身就是范畴,其中的态射是映射类型之间的规则或模式。一个软件程序是某种编程语言的一个实例,它反映或代表某个现实世界系统。多个软件程序可能以不同方式或使用不同编程语言表示同一个现实世界系统,甚至解决同一个现实世界问题。程序也可协同工作,以解决更高层次的问题并表示更高层次的系统。
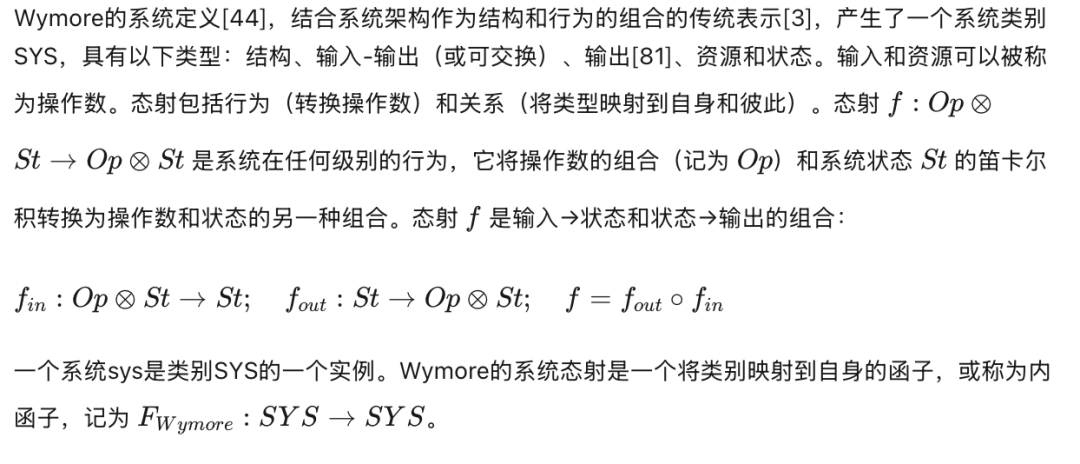
Wymore 将系统定义为输入到输出(I/O)的态射,该态射由输入到状态(I/S)的态射和状态到输出(S/O)的态射复合而成 [44]。系统同态(system homomorphism)是指两个系统设计(或模型)在状态集、输入集和输出集方面所具有的函数等价关系。系统 Z1(具有状态集 SZ1、输入集 IZ1 和输出集 OZ1)是系统 Z2(具有相应集合 SZ2、IZ2 和 OZ2)的同态映像,当且仅当:它将 Z1 的状态映射到 Z2 的状态,将 Z1 的输入映射到 Z2 的输入,将 Z1 的输出映射到 Z2 的输出,将 Z1 中输入-状态转换映射为 Z2 中成对状态的输入-状态转换,并将 Z2 中状态到输出的转换映射为 Z1 中状态到输出的转换。因此,在系统模型的范畴中,对象即系统模型,而态射即 Wymore 所定义的同态。
2.4.3 范畴论在系统工程、分析与设计中的应用
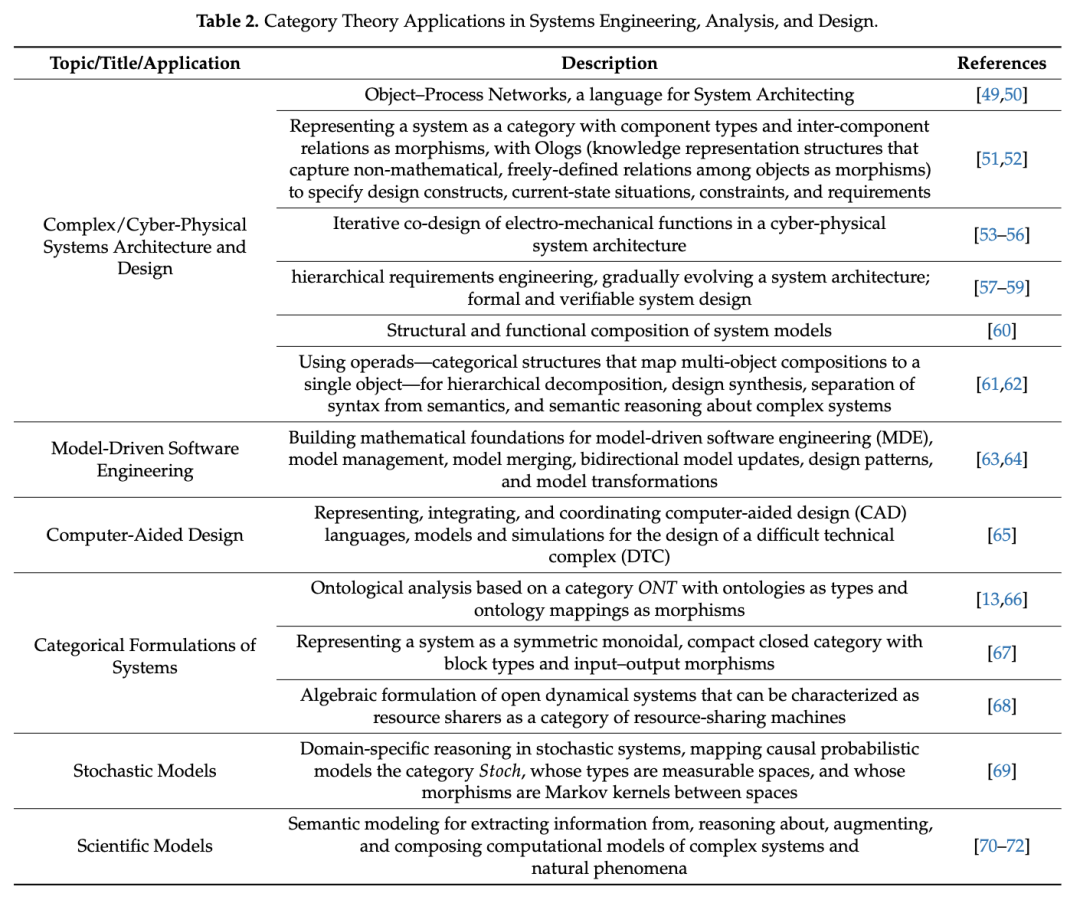
近年来,范畴论作为系统工程潜在的基础形式化方法、系统科学的重要支柱以及开放信息建模与分析平台的基础,正日益受到关注 [45],其语义根源可追溯至设计理论 [46]。所设想的平台的稳健性将允许领域无关地选择和组装构造与变换。美国国家标准与技术研究院(NIST)曾发布一份路线图,旨在弥合理论与实践之间的鸿沟,包括面向系统工程的具体应用 [47]。范畴论在系统分析、工程与设计领域的前沿应用总结见表2。
随着基于模型的系统工程(MBSE)正成为系统工程普遍且首选的方式,有必要整合任何适用的形式化方法至 MBSE 中,并通过整体性的形式化方法联邦来发挥 MBSE 的优势。本文聚焦于对已采用形式化建模语言的系统模型进行恰当的表示与分析,而非用数学形式化方法取代现有语言。相反,现有模型被视为给定的人工制品,重点在于模型分析、可视化及向各类利益相关者交付成果。
2.5 模型到图的转换
以图为中心的模型表示并非新概念 [73]。建模语言(MLs)本质上是图形化的;然而,基于图论的模型分析并未与建模语言同步发展。近期对此的兴趣可归因于图技术、图数据库和图分析的复兴与成熟,例如文献 [74–76] 所示。
将概念模型映射为图仍是一项具有挑战性的任务。模型是以逻辑数据结构存储的,而非直接以图的形式存储。图无法直接捕捉高级概念模型中的概念,例如分类、嵌套、逻辑关系和重叠。针对建模语言所使用的数据结构而设计的转换规则可提供帮助。例如,UML 拥有一种统一的交换结构 XMI,这是一种 XML 结构,用于促进不同建模工具之间 UML 和 SysML 模型的转换。SysML 模型的 XMI 表示可以被转换为图,与模式图进行对比并搜索设计模式 [14]。
资源描述框架(RDF)协议是一种用于网络本体规范的协议,由一组三元组构成,其结构类似于图数据结构(GDS)。GDS 可被视为一组 RDF 三元组,反之亦然。OPM 模型可通过 RDF 表示 [77–79]。
OPM 自动生成的文本化 OPL 规范对人类和计算机都清晰易读 [23]。OPL 覆盖了 OPM 模型的逻辑结构。从模型导出的报告中推断系统架构是可能的,但无法重建图表的示意性布局。然而,过滤掉图形布局偏差可能是有益的,因为布局可能影响决策者(例如,由于将某些实体描绘为中心或边缘位置)。
将“系统图”——一种表示复杂系统的类图模型——转换为扁平化的图数据结构,已被用于为定性关系分配定量指标,并应用于战略战争能力分析中的威胁评估 [80]。
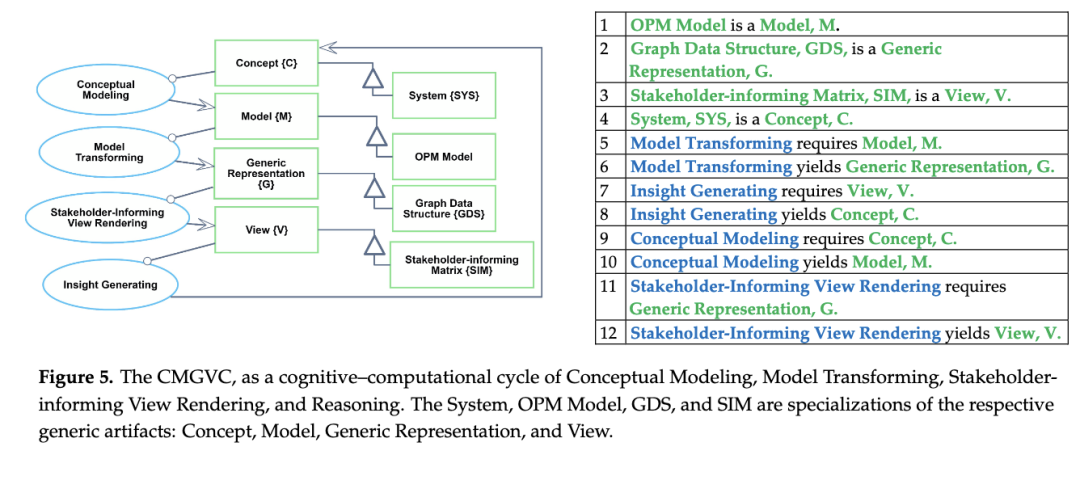
- 方法 我们描述了一个基于范畴论的框架及方法,用于构建和执行 CMGVC,该循环包含四个过程:(a) 概念建模:将概念转化为模型;(b) 模型转换:将模型转换为通用的、与语言无关的制品;(c) 利益相关者信息视图渲染:将通用表示转换为可视化或表现形式;(d) 推理,即理性化、理解、感知、决策和修订概念的认知过程。该过程使用 OPM 模型进行说明,并在图5中展示。
该框架定义了 CMGVC 中概念阶段与计算阶段之间的映射:概念阶段(第3.1节)、模型阶段(第3.2节)、通用表示阶段(第3.3节)、视图阶段(第3.4节)以及迭代阶段(第3.5节)。虽然 CMGVC 是普适性的,但我们聚焦于概念系统架构作为 C 的实例,采用 OPM 建模语言(M),以图数据结构作为全局表示(G),并以利益相关者信息矩阵作为视图(V)。这种特化也在图5中展示。

命题1:基于GDS的转换优于直接转换。通过图中介的转换 M→G→V 优于直接的模型到视图转换 M→V:MGV ≽ MV。
命题2:基于GDS的转换优于语言特定的转换。通过图中介的转换 M→G→V 优于通过建模语言绑定的通用表示 GR 从所有模型 M₁, …, Mₘ 到所有视图 V₁, …, Vᵥ 的转换:MGV ≽ MRV。
MGV 是 M→G 与 G→V 的复合。命题3断言,存在一个从模型 M 到 G 的转换。命题4断言,存在一个从 G 到视图 V 的转换。
命题3:存在一个模型到GDS的转换。设 ML 为一种建模语言,M 为 ML 中的一个模型。则存在一个形式化、有效且可行的模型到图转换 MG: ML→GDS。
命题4:存在一个GDS到视图的转换。设 V 为一个视图,G 为一组GDS元组。则存在一个形式化、有效且可行的图到视图转换 GV: GDS→V。
特别聚焦于SIMs(利益相关者信息矩阵),命题5断言:SIMs是GDS的有效视图。
命题5:存在一个GDS到SIM的转换。设 SIM 为一个利益相关者信息视图,G 为一组GDS元组。则存在一个形式化、有效且可行的图到SIM转换 GV: GDS→SIM。
3.1. 概念系统架构作为一个类别
信息物理系统(CPS)同时存在于物理和网络空间中,是系统工程的主要关注点。在我们的分类中,CPS行为/函数是态射,系统组件(传感器、处理器、执行器等)和操作数(货币、数据、能源和物质—CDEM)是类型。CPS组件执行将输入操作数转换为输出操作数的函数。一些例子在表3中显示。CPS函数可以组合以创建更高级别的功能,例如,感知,然后执行:物质→能源→数据→能源。我们还可以将函数定义为笛卡尔积,例如,一个工厂的功能是:
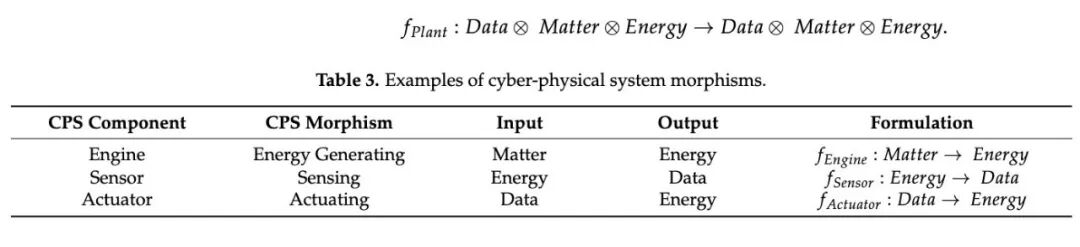
输入数据(例如,命令)、物质(例如,原材料)和能量(例如,电力)被转换为输出数据(例如,状态、报告)、物质(例如,成品、副产品)和能量(例如,热能)。在特定的系统领域内,某些序列可能无效。例如,在物流中,制造一个设备(一个执行器或传感器)是可能的,但在像飞机或自动驾驶汽车这样的操作系统中,制造一个新部件可能没有意义。另一方面,传感器“制造”图像信号可能是有效的。
我们的范畴化表述将系统视为影响操作数的行为使能结构。操作数也是类型。事实上,系统可以是一个操作数,操作数也可以是一个系统。想象一下,一辆汽车作为操作数从生产线上出来,作为一个系统出现,或者软件作为文件交付,即作为操作数,并且作为一个可执行的,即一个系统出现。
3.2. 建模语言作为一个类别
建模语言是类别,因为它们本质上是编程语言[82],并且编程语言是类别[20,21]。此外,程序等同于理论[22],同样,模型等同于系统概念,这些可以被认为是关于系统如何工作或可能如何工作的“理论”。系统模型是MLs的实例,就像软件程序是编程语言的实例一样。同样,用于创建图形、矩阵、树或动画的表示语言也可以被认为是类别。在表示之间进行转换对于获得系统理解以及实现系统或系统部分至关重要。例如,将功能模型转换为视觉动画、硬件和软件设计、文本规范等,可能会进一步解释系统。
断言MLs是类别必须有有效的范畴表示作为支持。像OPM和SysML这样的MLs[83]在句法上捕获结构、行为和关系实体。概念集构成一个句法领域无关的本体,它适应广泛的实例化。例如,块(Block)是SysML概念的一个基本元素。SysML块在块定义图(BDDs)和内部块图(IBDs)中建模。BDDs捕获块之间的关系,而IBDs捕获块之间的交互及其内部结构。一个块可能既是结构性的又是功能性的,这既实用又令人困惑。例如,一个块可以同时指定传感器及其传感功能

。
在SysML及其前身统一建模语言(UML)[84]中,捕获组件的行为,而不是其结构或功能,需要行为符号,如活动图或状态图。在活动图符号中,活动和动作是“框”(类型),而控制或数据流是“箭头”(态射)。在状态图符号中,状态是“框”,状态转换是“箭头”。SysML图中应用于“框”和“箭头”的不同语义可能会令人困惑,尽管经验丰富的分析师知道如何使用这些图来解释各种符号。将SysML模型通过范畴规范转换为统一符号需要巨大的努力。我们将这一努力推迟到未来的研究。
相反,OPM模型使用最小本体的对象、过程和关系,在其中语义歧义和冗余被消除或最小化。由于OPM的基本构建块是代表结构和过程的对象,这些对象代表行为,它们之间有相对较小的关系集,因此OPM语言的类别可能很小且易于处理。挑战在于正确表示语言领域。一个明显的范畴规范可以定义一个OPM类别,其中对象作为类型,过程作为态射。
在一个类别中,一个类别中的类型可以是另一个类别中的态射。OPM在组件表示对象和操作数表示对象之间做出了句法区分。事实上,同一个对象可以是一个系统的运算符,也可以是另一个系统的运算符。因此,如果它们执行过程,对象可以是态射,如果它们是过程的输入或输出,操作数可以是态射。过程和关系代表系统态射,但以图形形状捕获,这可能令人困惑。过程和关系也有它们自己的属性(持续时间、基数等)。
任何模型元素都是类型,包括那些可能具有操作语义的元素,如过程、函数、转换等。这也从视觉角度讲得通:画布上的每个形状都必须明确定义,无论其几何形状或语义如何。模型系统的“框”和“箭头”都必须在MLs中捕获为类型。
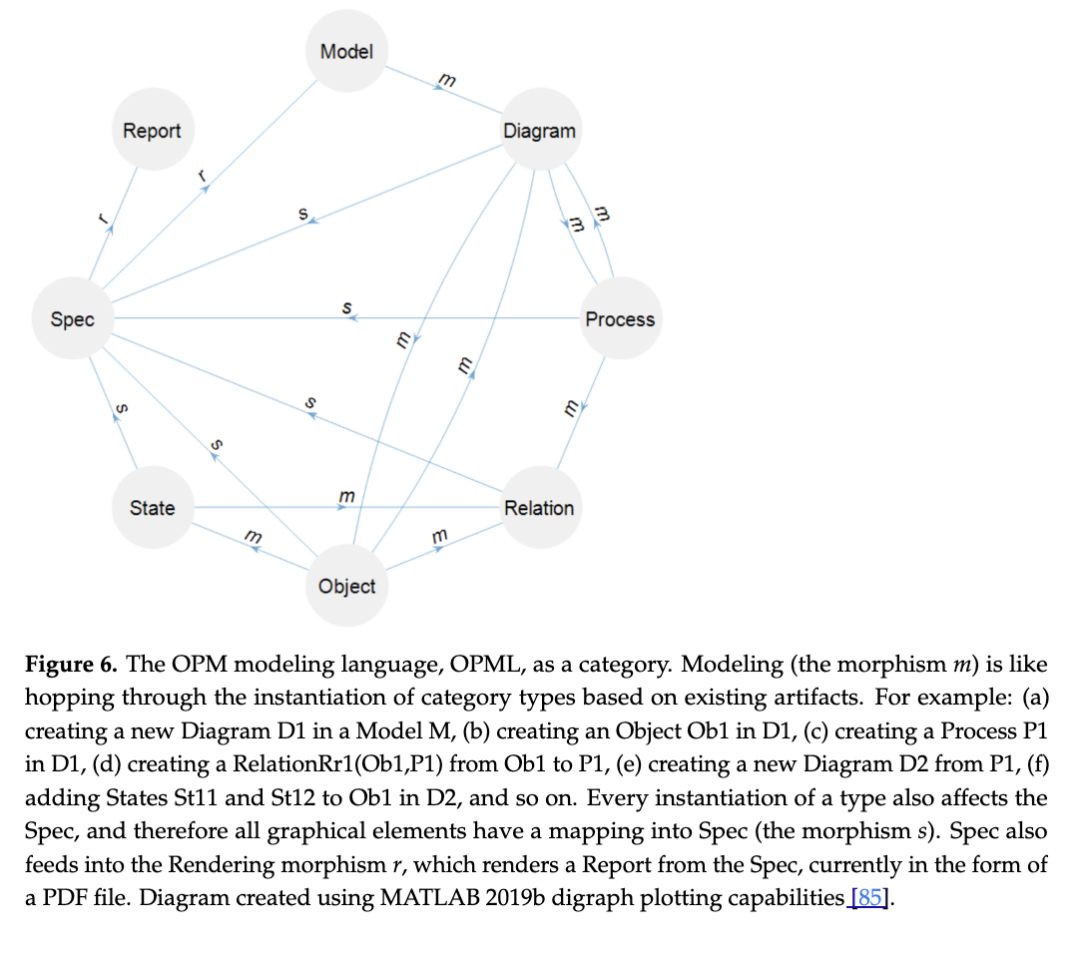
如果操作实体是类型,而不是态射——那么什么是态射?每个模型都有一个逻辑层,它支撑着视觉层。因此,每个模型元素必须从逻辑上捕获,否则它不过是一幅无意义的草图。因此,存在一个隐藏的类型,规范(Spec),它捕获视觉模型的逻辑表示。因此,指定——将视觉元素映射到规范——是一个态射。
这是另一种形态:建模,它通过模型创建或转换引导我们。作为建模者,我们可以通过我们的模式:(a)从一个空白图开始;(b)添加一个对象或过程——将我们的图转换为具有对象或过程的图;(c)创建一个新的图来指定对象或过程的细节;(d)添加一个状态到对象;(e)添加一个实体(对象、过程或状态)和另一个实体——如此等等。因此,一组建模态射出现:图→对象,图→过程,对象→图,过程→图,对象→状态,实体→关系,和关系→实体——建模态射。OPM不允许从状态或关系创建图——尽管这种扩展在理论上是有效的和可能的。挑战这种建模态射的存在或缺失可能有助于增强ML。
基于其他形式表示的计算命令允许自动化建模操作和编程建模命令。这允许基于其他形式表示创建模型。据我们所知,OPM没有编程接口,但如果将来提供,它可以遵循我们的范畴表述。
从其规范重建模型产生了第三种形态:渲染:将规范语句转换为视觉几何或文本/逻辑报告:渲染。指定→渲染对规范允许完整的模型重建(渲染)。OPM还以文本模式呈现规范的一部分:OPL规范。
在ML类别中建模、指定和渲染作为态射的概念在图6中为OPM ML类别、OPML中进行了说明。规范是关键类型,因为它使重建、组合、转换和比较模型成为可能。渲染规范作为可处理的中介报告工件,表示模型子类别映射到另一种表示——将ML映射到另一个类别的函子;OPCloud的导出报告是中介工件。两者都是C-集。
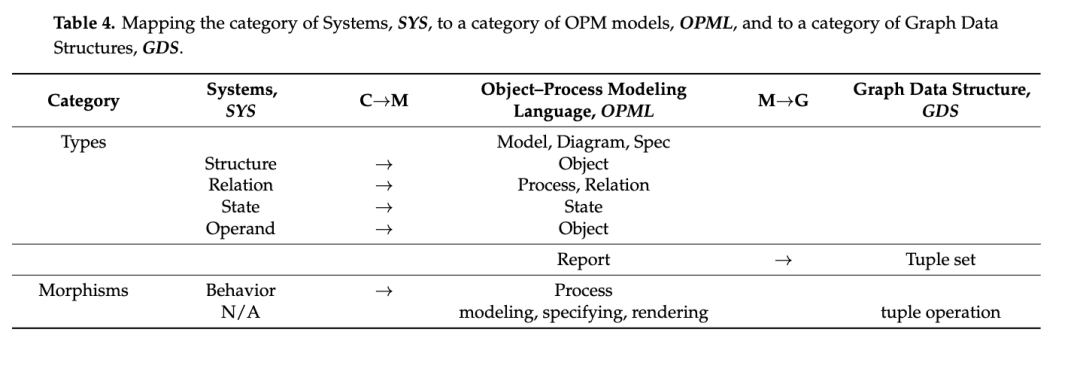
模型实体是其与系统类别SYS的接口。模型、图和规范并不是真正的系统概念——它们只是帮助我们管理系统复杂性。这种系统到模型的映射构成了CMGVC的C→M部分。OPML→GDS函子将OPML中的所有类型映射到GDS元组。CMGVC的C→M→G部分在表4中进行了说明。
3.3 将模型转换为图
MGV 转换是由两个步骤组成的复合过程:首先是从模型到统一的图数据结构(GDS)表示的转换(M→G),其次是将 GDS 转换为视图的转换(G→V)。转换至 GDS 需要将每个建模语言(ML)构造映射到 GDS 范畴中的类型。图仅包含两个元素:节点(nodes)和边(edges)。而 GDS 仅包含一个元素:元组(tuple,即对“节点–边–节点”三元组的抽象与扩展)。
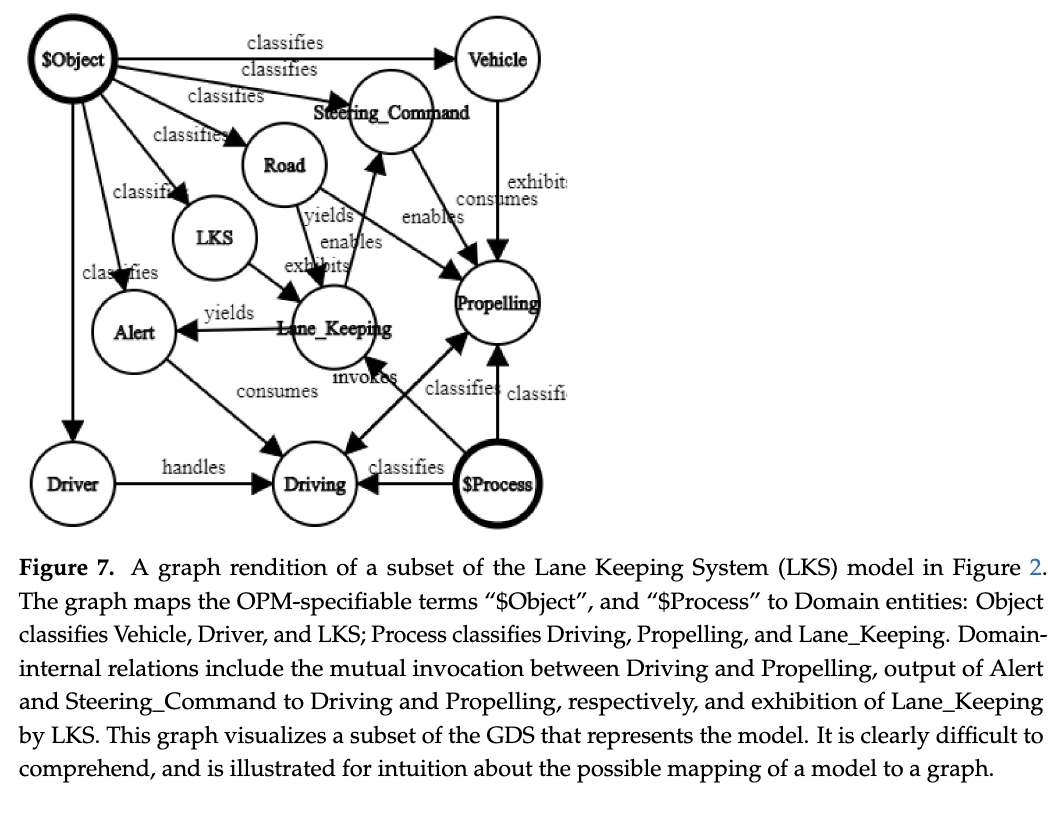
图仅仅是 GDS 的一种视图。这类转换在图形化建模语言(graphic MLs)上是可行的,尽管图形并不总能直接映射为简单图——例如,当形状嵌套在其他形状内或与其他形状重叠时(如维恩图所示)。OPCloud 导出的报告包括文本化的 OPL 规范以及模型中对象、过程和关系的列表。这有助于映射所有模型实体与关系,并将其翻译为 GDS 元组。最终产物 G 是一组元组,包含关系 R、源节点 S、目标节点 T、唯一标识符 U 和估值器 V,记作 RSTUV 元组。V 在量化、验证、确认、版本控制和配置管理等各类应用中非常有用。让我们重新审视图2中的车道保持系统模型,并将其转换为 GDS。该模型的图示如图7所示。
RSTUV 足以表示模型数据。它还能捕捉模型中未明确图示的方面。例如,它指定了模型包含哪些图表,以及每个图表所包含的可视化对象和过程。RSTUV 元组集合是通过执行以下从 OPML 到 GDS 的函数规则得到的(也在表5中进行了总结):
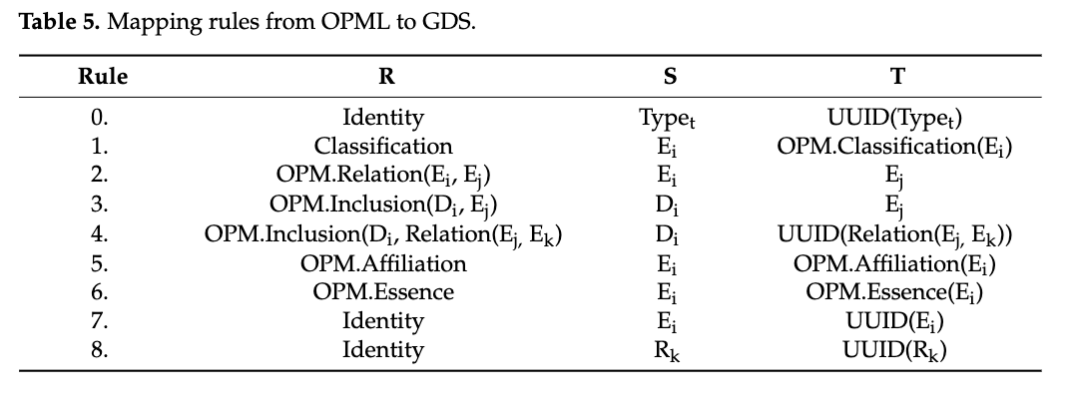
- 建模语言(ML)类型被定义为 RSTUV 标识元组。此步骤每个 ML 仅执行一次。
- 实体根据分类关系映射为其对应的 OPM 实体类型(如模型、图表、对象、过程等)。
- 关系(例如,实体 Eᵢ 和 Eⱼ 通过关系 R 相连)保持原样映射。
- 每个实体 Eⱼ 映射到任意包含它的图表 Dᵢ,通过“包含”关系(Inclusion relation)实现。
- 关系映射到任意包含它们的图表,同样通过“包含”关系实现。
- 实体的归属关系(系统性/环境性)被映射为“归属关系”(Affiliation relations)。
- 实体的本质属性(物理性/信息性)被映射为“本质关系”(Essence relations)[4]。
根据范畴论,每个对象必须通过恒等态射与自身相连 [51]。因此,还需要另外两个映射:
- 实体被映射到全局唯一标识号(UUIDs),作为构成每个实体自身恒等态射的“恒等关系”。
- 关系通过“恒等关系”映射到 UUIDs,构成每个关系自身的恒等态射。
执行上述映射的 OPML→GDS C-集函子如图8所示。该函子从 OPCloud 生成的报告(OPM.ExportedReport)中提取 OPM 元素。ExportedReport 提供了分析 OPM 模型所需的大部分信息(但不包含图中形状的位置信息,因此无法精确重建原始图表的布局,只能还原出各元素在每个图表中的参与情况)。
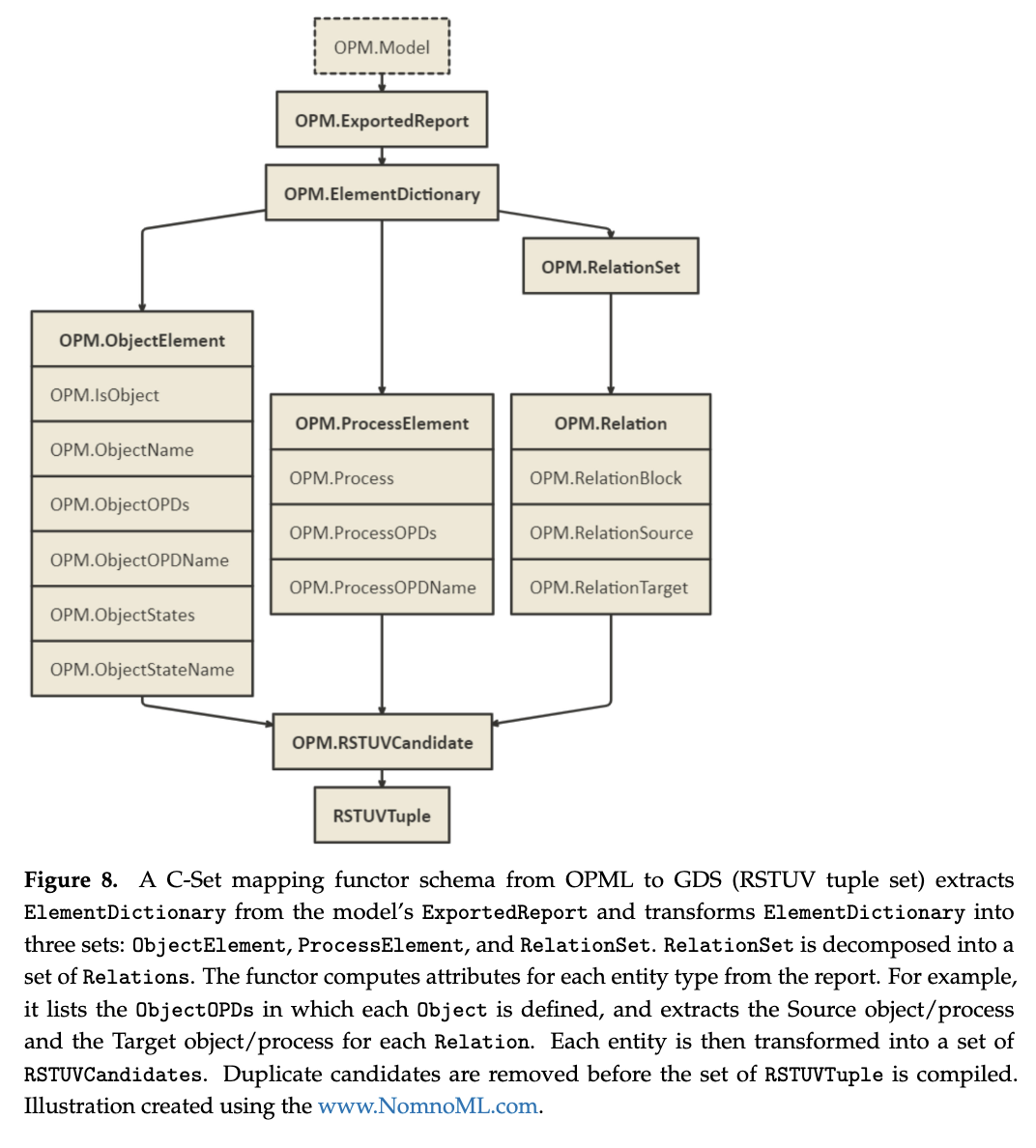
从 ExportedReport 出发,我们生成两个中间范畴:ElementDictionary 和 OPLSpec。我们将这两个对象称为“集合”,但由于集合成员结构复杂且异构,我们需要对成员进一步分解并转换为适当的数据结构。例如,我们需要找出每个对象(Object)和过程(Process)所出现的 OPD(分别记为 ObjectOPDs 和 ProcessOPDs)。
ElementDictionary 并未指明关系(Relations)在 OPD 中的出现情况,但与这些关系相关的语句已在每个 OPD 所附带的 OPL 文本中明确说明。为了提取这一信息,我们需要分析 OPLSpec,识别出每个关系在对应图表下所对应的语句,并将 OPD 与 OPL 语句之间的关联正确匹配到相应的关系上。
一个通用的转换函数 OntologyMapping 负责转换或扩展本体术语,并执行 OPML→GDS 函数的所有组成部分。OntologyMapping 从表示外部模型及其他信息源(例如 OPM.ExportedReport)的原始输入开始,递归地创建新条目或扩展现有条目。ExportedReport → ElementDictionary 的转换,以及随后的三个转换 ElementDictionary → {ObjectElement, ProcessElement, RelationSet},均用于创建新的条目集合。RelationSet 进一步被转换为一个新的 Relation 条目集合。这一步骤是因为 OPCloud 导出的报告将同一类型的所有关系聚合成组。
OntologyMapping 为 ObjectElement 扩展诸如 IsObject、ObjectName 和 ObjectStates 等属性;类似地,为 ProcessElement 扩展 IsProcess、ProcessOPDs 等属性;并为 RelationSet 扩展 RelationBlock、RelationSource 和 RelationTarget 等属性。
OntologyMapping 的强大与稳健性使其能够递归搜索因创建新条目而所需的额外映射,但首先它会确保所有扩展属性均已计算完成,因为这些属性可能在创建新条目时被需要。例如,为了创建覆盖所有与 Process 条目相关关系的 RSTUVCandidates,我们需要知道该过程所涉及的所有 OPD,并为每个过程元素 p(p ∈ ProcessElement 集合,p = 1, …, |ProcessElement|)创建一个独立的 RSTUVCandidate,其中 R = 'Inclusion',S = ProcessElement(p).ProcessOPD,T = ProcessElement(p).Process。
OntologyMapping 还支持将条目映射并分类为“身份属性”——即其值被转换为“身份关系”和“分类关系”的属性:
- “身份关系”将每个条目映射到一个全局唯一标识符(UUID)。
- “分类关系”将每个条目映射到其类型(即属性名称)。例如,Diagram 列中的每个条目都被映射为一个 RSTUVTuple,其中 R = 'Classification',S = 'OPM.Diagram',T = Item.UUID。
对于具有指定关系的源属性与目标属性对,每一对属性值会被转换为一个带有指定关系的 RST 三元组。例如,OPM.Object 和 OPM.ObjectState 属性被映射为一组 RST 三元组,其中 R = StateSpecification,S = {属于 OPM.Object 的项:ObjectElement},T = {属于 OPM.ObjectState 的项——一个或多个状态名称}。
对于包含源、目标和关系属性的三元组,每个属性值三元组直接映射为一个 RSTUVTuple。例如,在 OPM.Relation 块下,R = Relation,S = {一个对象、过程或状态},T = {一个对象、过程或状态}。
该映射通过组合方式搜索所有有效的成对及三元组排列,并生成一组唯一的 RSTUV 候选者。一个指向相同关系、源和目标实体的 RSTUVCandidate 可能从多个块中生成。例如,OPM.Diagram 的身份元组可同时为 ObjectElement 和 ProcessElement 生成。这是因为图名并未在 ElementDictionary 中单独定义,仅间接地通过列出各对象和过程所可视化的 OPD 来体现。因此,每个 RST 三元组必须仅保留一份副本。
3.4 将图转换为视图与 SIMs
该流程的下一步是在模型的 GDS(一组 RSTUV 元组)上定义信息丰富的视图,如第 2.3 节所述的 SIMs。如图2所示,基本图、邻接矩阵和 RST 元组集是等价的表示形式。因此,模型中由 GDS 捕获的任何关系模式,均可表示为矩阵。此外,通过选择特定关系或关系子集进行映射,可以支持推理过程,形成面向利益相关者的视图,例如基于 GDS(从而基于模型本身)构建的矩阵。
SIM 捕捉了行项目到列项目的映射。我们可以指定一组关系,并根据所选关系获得行项目到列项目的映射。我们还可以重构或组合 GDS 上的关系线程与跨度。附加分析可包括计数、求和、最小值、最大值、小计、指示器关联/转换后的矩阵单元格值等。例如,若要求每个交叉点允许的关系数量必须为正数,我们可快速发现偏差(视觉上和计算上均可)。
3.5 将视图转化为概念,再将概念转化回模型
CMGVC 的认知部分 V→C→M 包含推理、决策和行动。在此过程中,我们研究视图,结合知识与信念对信息进行心理融合、质疑或验证,并创建或修订心智模型或概念。基于我们心中的概念,我们做出调整概念或改变现实以匹配修订后概念的决策。这些从认知视图到概念、以及从概念到模型的映射,通过回归至概念系统范畴 SYS,闭合了整个循环。现有系统的模型用于解释关于系统的假设、理论或事实;未来系统的模型则用于向利益相关者说明符合其概念的系统。利益相关者之后可采取行动执行决策,并告知模型开发者有关系统预期结构与行为的信息,以实现该概念。概念转换是一个认知过程,它闭合了循环,使我们能够通过描述或规定系统的概念模型重新迭代。这些转换的严谨表述需建立在认知心理学的基础上,本文建议将其作为本研究的延伸方向。
- 实现
本节聚焦于 CMGVC 软件平台原型,该原型自动化了上述部分流程。高层原型架构如图9所示。该原型包含三个主要模块:模型转换模块、存储模块和可视化模块。多个软件开发工具被用于实现此架构。
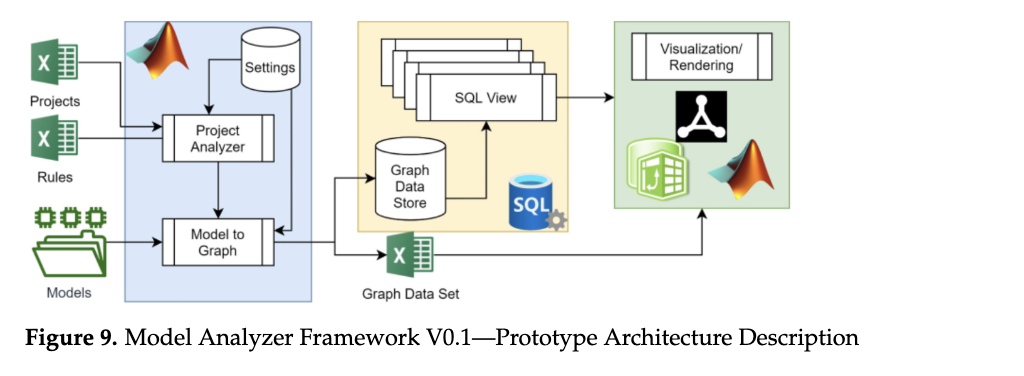
模型转换功能在 MATLAB 中实现,使用在 MS Excel 文件中定义的设置、输入定义以及本体映射规则。项目分析器(Project Analyzer)从“项目文件”(Projects file)中读取一组项目,每个项目包含一个或多个模型,其中每个模型都有唯一标识,并且每个模型所使用的建模语言(ML)均已定义。一个项目可以支持多种建模语言的模型,也可以包含包含多个模型文件的文件夹。原始模型表示以文件或文件目录的形式提供,模型的路径存储在项目文件中。项目分析器读取这些原始模型表示文件,并将其输入到“模型到图”(Model-to-Graph)功能模块中。
“模型到图转换”(Model-to-Graph Transformation)实现了 OntologyMapping 功能。它首先读取并转换来自模型文件的原始数据,这些文件可以是 MS Excel、PDF、XML 或 JSON 格式。“规则文件”(Rules file)定义了一组本体映射规则。程序读取适用于当前处理模型的建模语言的映射规则,并将其应用于原始模型。由此生成中间表示,这些中间表示可能还需经过进一步的映射。因此,该处理过程是递归的,会持续执行,直到所得数据集中不再有适用的映射规则为止。
某些映射规则可以定义为 JavaScript 对象表示法(JSON)数据结构,用于指定对任意条目所需的转换。图10展示了一个将 ProcessElement 映射为 RSTUVCandidate 的 JSON 配置示例。该 JSON 对象可以定义:
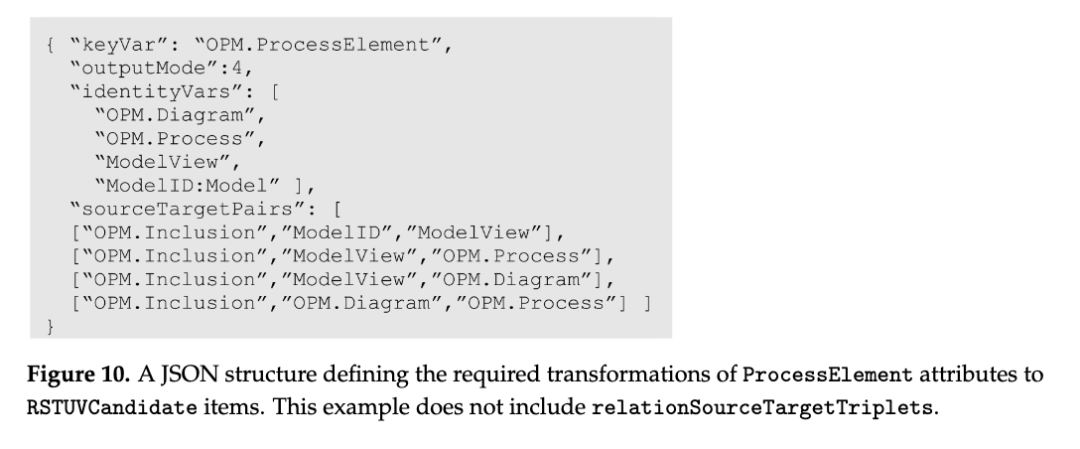
- 身份属性(identityVars);
- 具有指定关系的源–目标属性对(sourceTargetPairs);
- 关系–源–目标三元组(relationSourceTargetTriplets)。
映射函数会组合式地搜索所有有效的属性对和三元组排列,并生成一组唯一的 RSTUV 候选项。该机制仅保留具有相同 RST 的相似 RSTUV 候选项中的首次出现项。最终,生成一组 GDS 元组。
该平台将 GDS 元组集合存储在 Microsoft SQL Server 或 Microsoft Excel 文件中(具体方式在项目文件中定义)。对 GDS 的视图可视化和渲染可通过 SQL Server 数据库中的 SQL 视图或 Excel 输出实现。一系列 SQL 连接查询构成了从原始 GDS 到矩阵或张量数据集的函子 [86],可视化与分析工具可将这些数据集渲染为矩阵。Microsoft Excel 可从数据库导入查询结果,在原始数据之上构建数据透视表,并生成相应的可视化。数据透视表具有灵活的结构,允许分析人员根据不同的可视化需求调整、转置和分层组织矩阵。现成的数据分析工具(如数据透视表)简化了分析过程,并最大限度地减少了对专用工具的依赖。此外,还可通过 MATLAB 以及图可视化工具(如本文通篇使用的 CSAcademy Graph Editor,https://csacademy.com/app/graph_editor/)实现其他形式的分析与可视化。
- 评估 CMGVC 显著区别于直接从模型生成视图的方法,也为基于领域特定建模语言(DSML)特定表示的间接视图生成提供了一种更为稳健的替代方案。在第 3.1 节中,我们为本研究提出了五个命题:
- M→G→V(通过GDS进行模型到视图的转换)优于M→V(从模型直接转换到视图)。
- M→G→V优于M→R→V(通过语言绑定表示LBR进行转换)。
- M→G是一个可行且有效的转换。
- G→V是一个可行且有效的转换。
- G→SIM是一个可行且有效的转换。
我们已经提出了一个范畴化框架,用于将一个ML(建模语言)中的概念系统模型转换为GDS(通用设计空间),并从GDS中派生出SIM(系统交互模型)视图。我们因此验证了命题3、4和5关于基于GV∘MG的复合转换M→G→V的存在性,其中MG:M→G,GV:G→V。
为了证明命题1和2,我们必须比较CMGVC方法与两种替代方法的优缺点:
- MV:从模型直接生成视图,我们将其表示为V(M)或MV
- MRV:通过通用DSML(领域特定建模语言)表示间接从模型生成视图,我们将在R(DSML)或MRV中展示
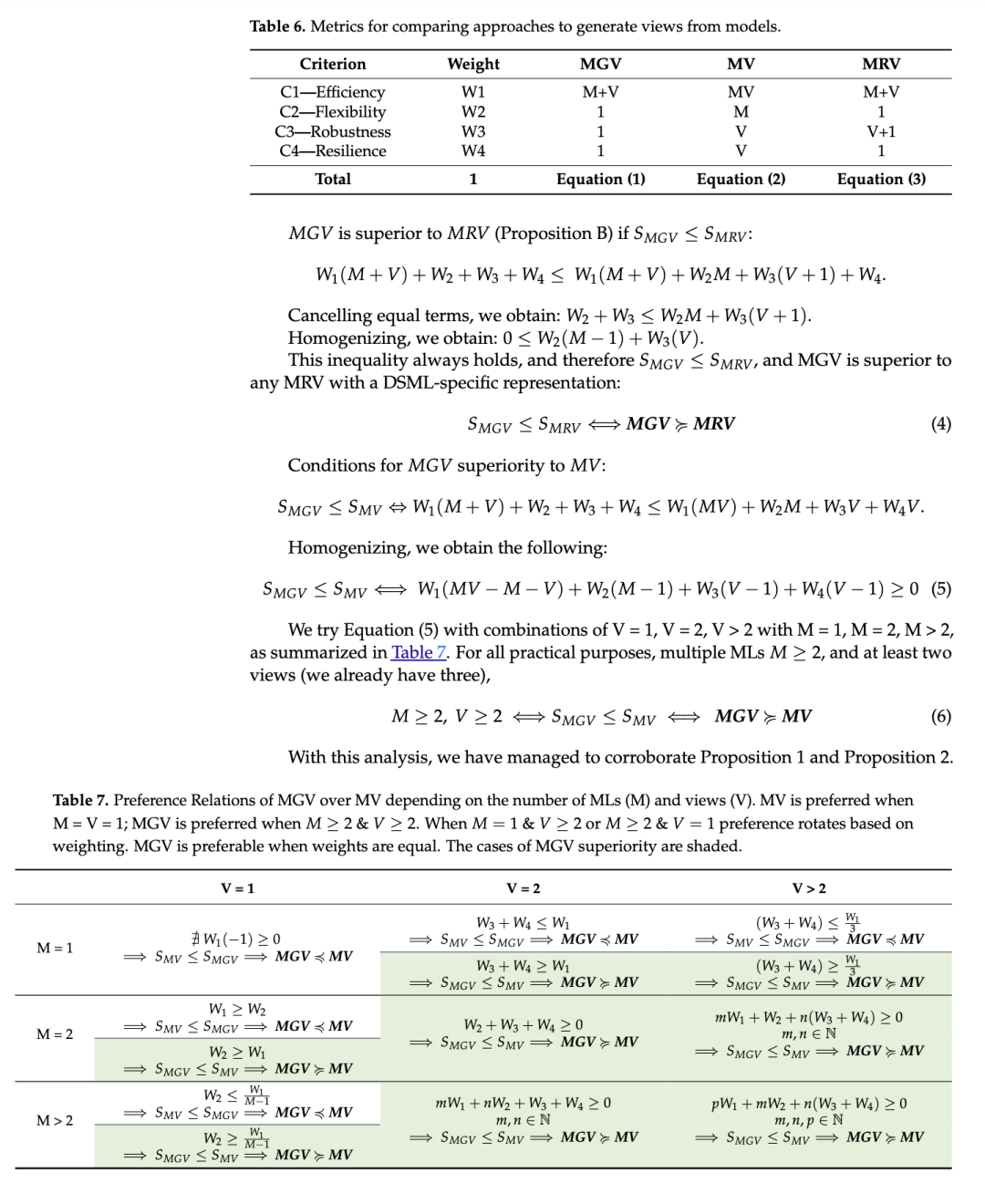
我们定义了四个较低即较好的(LIB)标准进行比较,这些标准反映了利益相关者对效率(C1)、灵活性(C2)、鲁棒性(C3)和弹性(C4)的需求:
- C1—效率通过将M模型转换为V视图所需的转换次数来衡量。对于MGV,MRV:模型到图转换(M)和图到视图转换(V)的总和;对于MV:视图数量(M-V)的乘积。
- C2—灵活性通过为现有模型创建新视图的努力来衡量。对于MGV,MRV:每个视图一个努力单位(图到视图或LBR到视图);对于M:M努力单位(模型到视图)。
- C3—鲁棒性通过为新模型创建现有视图的努力来衡量:对于MGV:单个努力单位(模型到图);对于MV:V努力单位(模型到视图);对于MRV:V+1努力单位(模型到LBR和LBR到视图)。
- C4—弹性通过对DSML更新的依赖性来衡量:对于MGV,MRV:单个努力单位用于更新(模型到图或模型到LBR);对于MV:V努力单位(模型到视图)。
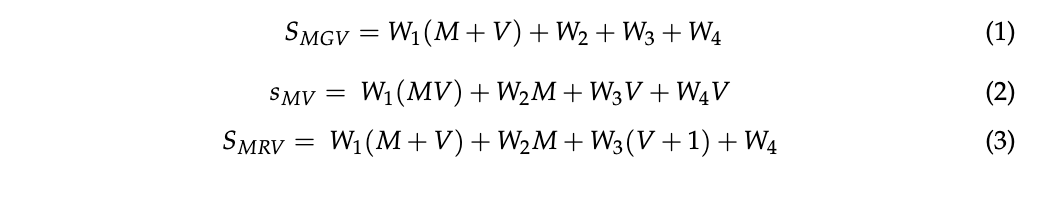
由于所有标准都是LIB,总分也是LIB。表6定义了每个标准度量。MGV、MV和MRV的总分在方程(1)-(3)中定义。
- 应用
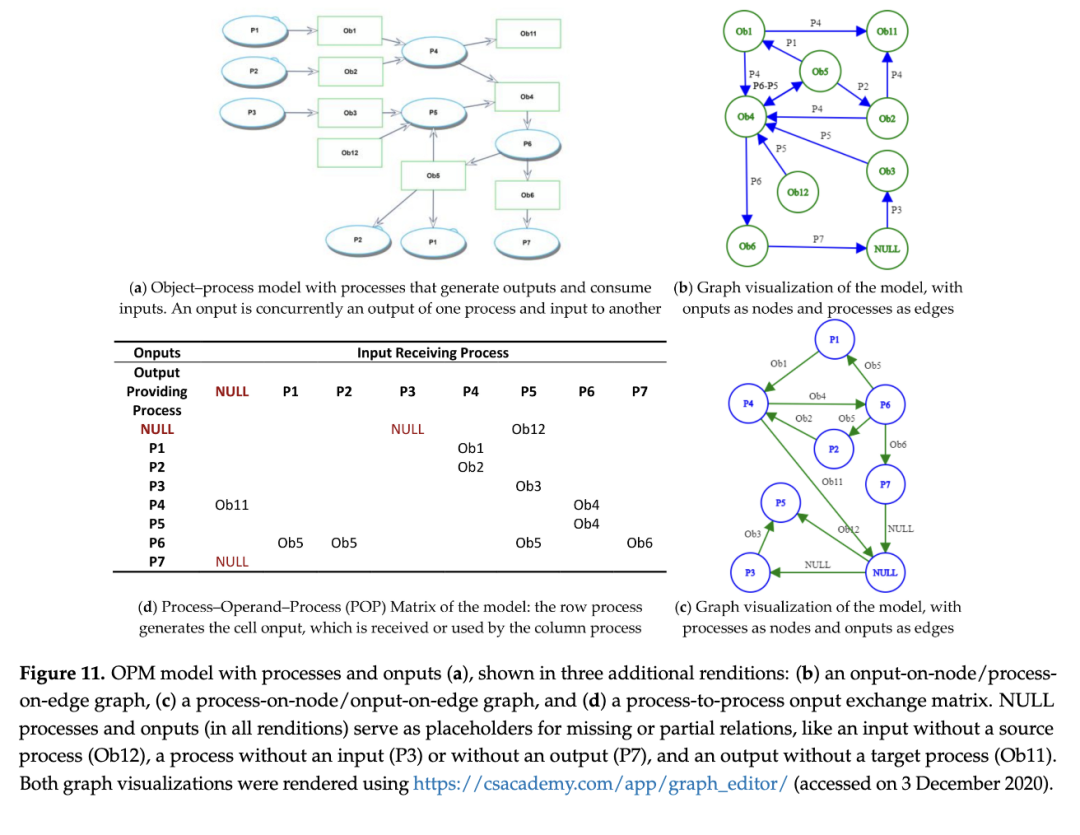
6.1 过程到过程的输入–输出交换的表示与分析
表1(第2.3节)展示了两个将不同系统架构方面相互映射的 SAM 示例。这两个 SAM 均包含过程到过程的映射。表1a 包含通过操作数实现的过程到过程的显式映射。操作数作为间接的过程中介:一个过程的输出是另一个过程的输入。然而,模型中不存在以 <P,O,P> 形式表达的显式映射。因此,必须合成该映射。此合成按以下方式定义,使用 SQL 查询从原始 RSTUV 元组集中检索并交叉数据:
- 找出所有过程,即 S = 'OPM.Process' 且 R = 'Classification' 的元组中的目标项。
- 找出所有输出,即 R = 'Result' 的元组中的目标项,并检索其源过程项。
- 找出上述输出在“消耗”关系中作为源(即输入)的所有元组,并检索目标过程项。
- 将过程–输出集与输入–过程集进行交叉,使得输出等于输入。
- 将过程集 (1) 与输出生成过程集 (2) 进行交叉。保留所有过程,包括那些未产生任何输出的过程。
- 将过程集 (1) 与输入接收过程集 (3) 进行交叉。保留所有过程,包括那些未接收任何输入的过程。
- 布局一个矩阵,其中输出生成过程作为行,输入接收过程作为列,匹配的输出–输入(onput [81])项作为单元格。
图11 展示了任意 OPM 模型经 MGV 转换后生成的三种视图。
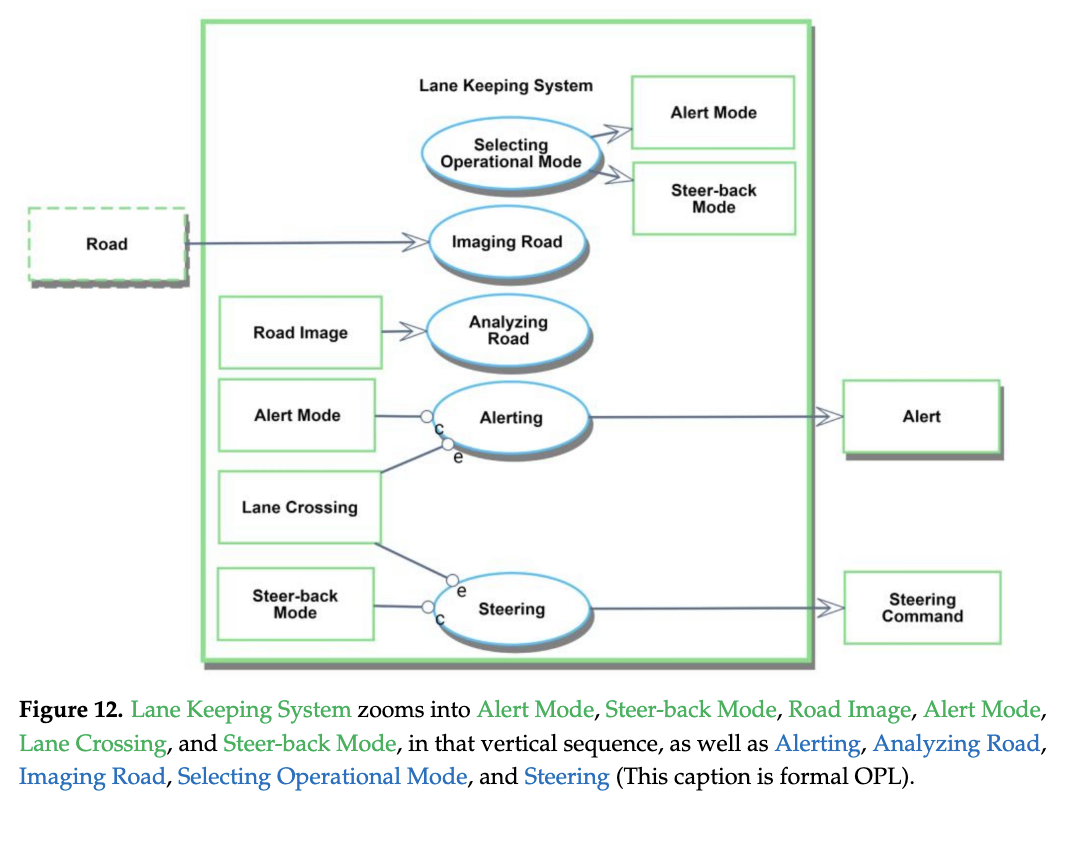
6.2 重新审视车道保持系统
我们现在可以依据 CMGVC 对作为贯穿示例的车道保持系统(LKS)进行分析。图12展示了一个放大后的 LKS 图,其中明确了系统所执行的功能及其相互作用。这是一张有意保留部分信息的不完整图表,存在一些关键缺口。例如,在研读该图时我们应注意到:“车道穿越”(Lane Crossing)对象没有来源,且“道路”(Road)在“道路成像”(Imaging Road)过程中被标记为“消耗”(consumed),而非如顶层图表中所规定的那样作为“工具”(instrument)保留下来。以这种方式很难保证模型的连续性与一致性,而随着模型规模扩大、包含更多对象、过程和图表,这一问题会愈发严重。
通过 POP 矩阵(Process–Operand–Process 矩阵)分析该模型,有助于发现模型中的一些不一致之处。表8即是一个 POP 矩阵,它通过第6.1节中为支持 POP 矩阵所定义的相同 SQL 查询从模型中导出,并利用 Microsoft Excel 数据透视表对查询结果进行渲染生成。LKS 模型除了使用“结果”(Result)和“消耗”(Consumption)关系外,还引入了其他过程性关系:“工具”(Instrument)关系用于表示不可消耗的资源,“调用”(Invocation)关系用于指定一个过程由另一过程激活,这隐含了一个未明确说明的接口对象。此外,POP 矩阵中还增加了额外的度量指标,包括每个过程的输入数量(按列计算)和输出数量(按行计算)。
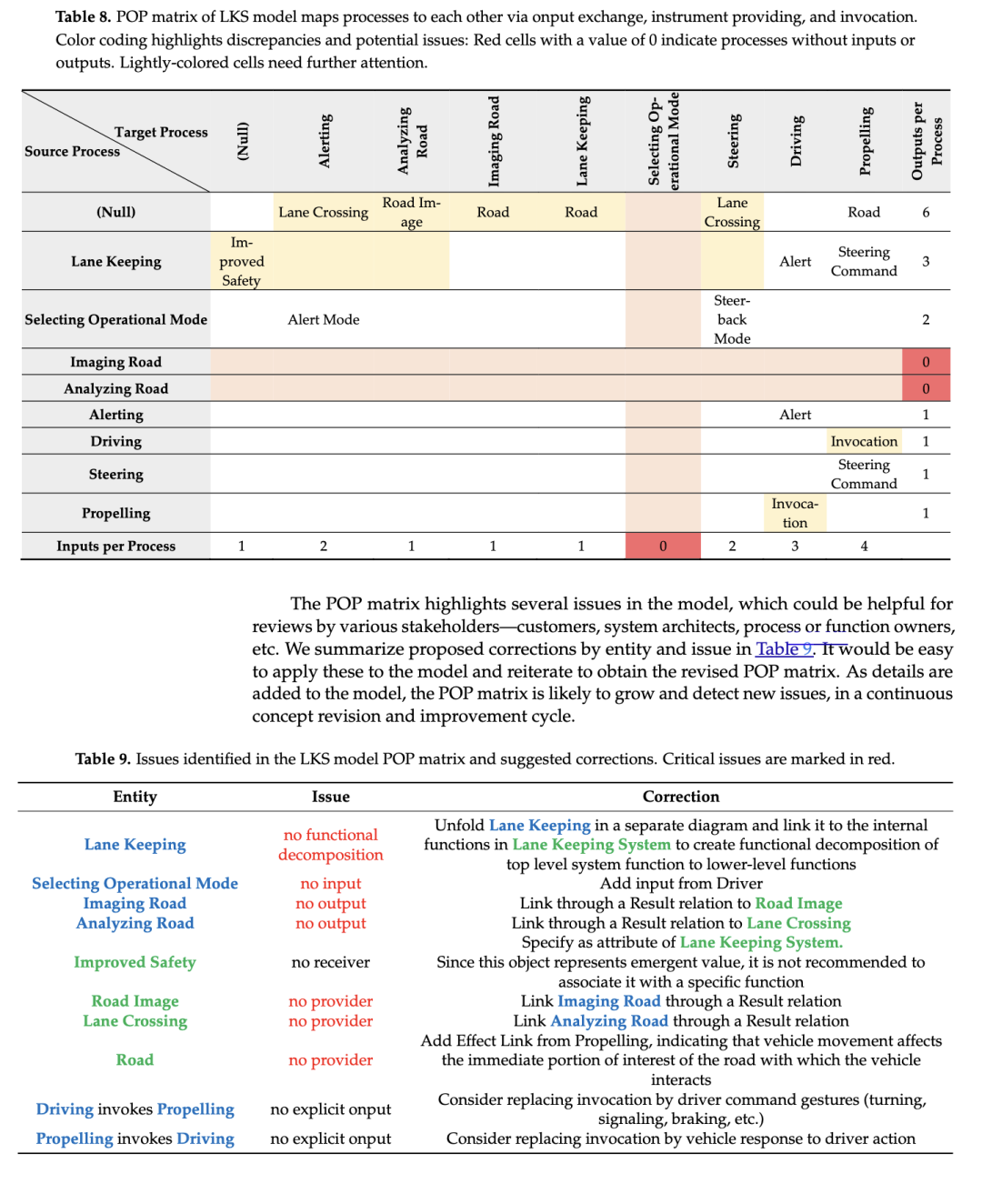
- 讨论 本文在方法论和实证层面均有若干结果与成果值得讨论。本研究的主要成果是基于坚实的范畴论基础,提出了概念–模型–图–视图循环(CMGVC)。除了这一正在形成的总体框架外,我们在循环的每个阶段也获得了不同细化程度的成果。
CMGVC 的提出为基于模型的系统工程(MBSE)指明了一个富有前景的方向,这一点也得到了同行及匿名审稿人的认可。当前,系统工程正处于数字化转型之中,而系统的复杂性与互联性又在持续增长。概念建模正日益普遍地用于表示复杂系统,并在生成影响数字价值链的交付物方面变得愈发关键 [10]。面对这些趋势所带来的挑战与机遇,为数字企业间的互操作性与协作建立稳健的基础,很可能成为推动数字系统工程的重要使能因素。
本文断言并论证了“建模语言即范畴”这一观点,这是对知识体系的一项重要贡献,因为它将 Curry–Howard–Lambek 对应关系从编程语言拓展到了建模语言。我们利用范畴结构,将系统概念映射到形式化模型,将模型映射到稳健的图数据结构(GDS),再将 GDS 映射到面向利益相关者的视图——包括图和矩阵。当这些表示被定义为范畴后,一种由范畴论驱动的新型 MBSE 范式便有可能涌现。该范式还可进一步拓展,例如将更多建模语言定义为范畴,或定义更多从 GDS 到视图的函子映射,包括模型到模型的转换。
本研究为面向利益相关者的可视化(尤其是矩阵)提供了严谨而稳健的基础,用于生成、处理和分析基于模型的数据。我们生成的两种图表示实际上是互为对偶的:一种是以过程为节点、操作数(onput)为边的图,另一种是以操作数为节点、过程为边的图。这两种对偶图各有用途与优势。能够从同一数据结构生成这两种图是一项重要优势,同时也确保了它们之间的一致性与互补性。SysML 的内部块图(IBD)采用“对象为节点”的语义,活动图是一种“过程为节点”的图,而状态图则采用“状态为节点”的语义。这三种视角均可从同一个 OPM 模型的 GDS 中生成。因此,GDS 有助于实现建模语言之间的转换,这是未来研究的一个有前景的方向。
过程–操作数–过程交换矩阵(Process–Operand–Process Exchange Matrix)是一种重要的架构分析工具。它捕捉了一种非平凡的映射关系,我们通过在 GDS 中组合关系片段,并借助稳健的数据检索与集成查询构建了该矩阵。若手动创建并维护此类矩阵,将耗费巨大的认知 effort。而利用数据透视表动态可视化该矩阵则是另一大优势,因其易于使用,且能灵活适应不断变化的需求。我们还展示了如何利用检测到的关系异常来驱动概念与模型的修订。尽管此类分析也可基于手工构建或其他方式生成的矩阵进行,但我们的方法提供了更高的可信度,因为数据直接源自模型,并可进行任意必要的组合或聚合以生成有益的可视化。此外,我们的方法还为广泛的可视化与数字化表示奠定了基础。后者可为数字参与者提供信息,并极大提升企业内部及企业之间的互操作性与协同能力。
- 结论 本文探讨了范畴论作为系统工程(特别是基于模型的系统工程,MBSE)底层形式化框架的潜力。范畴论是一种恰当的整体性范式、一种思维方式,也是模型转换与推理流水线的坚实形式基础,而这一流水线对于实现一个顺畅、理性且可靠的 MBSE 循环至关重要——该循环能够持续改进、修正并精炼系统架构规范。
概念–模型–图–视图循环(CMGVC)促进了将概念模型转换为面向利益相关者、支持决策的视图。我们已表明,在模型与视图之间引入一种中间的通用表示——即图数据结构(GDS)——是必要的。GDS 作为所有建模语言(MLs)的共同输出端,同时也是所有视图、可视化和报告的共同基础。我们已证明,相较于直接映射和建模语言绑定的映射,我们的方法具有优越性。
CMGVC 具有以下若干优势:
- 利用 CMGVC,利益相关者和决策者能够直接从系统模型中获取关于系统开发与运行的关键信息和洞见,而非依赖当今常见的、分散的信息收集与呈现渠道。
- 我们在第5节中证明的优先优势有助于提升模型分析的效率,从而促进该方法的进一步采用。
- 通过 GDS 的转换增加了另一种模态——图,它通过一种统一的实质性表示来映射概念与关系,从而加深对系统的理解。
- 简洁而稳健的 GDS 可成为推动 MBSE 在数字价值链中实现互操作性与协作的关键使能因素。
- 领域专家可借助 CMGVC,结合语义与本体框架,更好地表达新兴的模式与概念。
我们已演示了如何基于单一 GDS 对模型进行多种方式的表示——包括两种可视化图形式和一个过程到过程的操作数交换矩阵。
我们计划进一步验证 CMGVC 能够稳健地适用于其他多种建模语言和视图。特别是,我们计划探索通过 CMGVC 流水线转换 SysML 和 Simulink 模型,并生成有意义的、与源语言无关的视图,包括利益相关者信息矩阵(SIMs)、子图、状态空间,以及其他建模语言中的规范。支持往返工程(round-trip engineering)的同构映射——即从同一建模语言映射出去再映射回来——也构成一项重大挑战 [87]。
近年来,MBSE 与离散事件系统规范(DEVS)范式的融合已成为一个新兴趋势 [88]。MBSE 与 DEVS 社区之间的持续合作已通过国际系统工程理事会(INCOSE)与国际工程建模与仿真协会(NAFEMS)的联合工作组制度化 [89]。我们的框架可促进 MBSE 与 DEVS 平台、工具和模型之间的互操作性。它减轻了寻找并应用一种能同时满足 MBSE 与 DEVS 需求的互操作标准的压力,原因在于:基于图论的 DEVS 算法十分丰富,且几十年来,DEVS 技术与方法已被广泛用于研究可图表示的问题,例如作为基于智能体的建模与仿真(ABMS)范式的一部分 [90,91]。
我们方法的一个局限性在于可扩展性。我们计划构建一个面向服务的软件平台,将稳健的转换能力以 Web 服务的形式提供给 MBSE 从业者和研究人员,使其能够上传或接入实时模型并生成有用的可视化结果。MBSE 专家将能够定义和管理映射规则及视图集,以在特定模型上运行。这些功能将支持在整个数字企业中实现持续可视化或与外部系统的集成。我们计划采用最先进的图数据库和信息可视化技术,为利益相关者提供灵活、动态且优雅的决策支持视图。
https://www.mdpi.com/2076-3417/11/4/1945
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-10-04,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号