《信号与系统》第八章 系统的状态变量分析

《信号与系统》第八章 系统的状态变量分析

啊阿狸不会拉杆
发布于 2026-01-21 11:53:34
发布于 2026-01-21 11:53:34
思维导图

8.1 状态变量与状态方程
一、状态与状态变量的概念
状态:系统在某一时刻的内部状态,是足以确定系统未来行为的最小一组变量。
状态变量:描述系统状态的变量,通常选择储能元件的物理量(如电容电压、电感电流)。
二、状态方程和输出方程
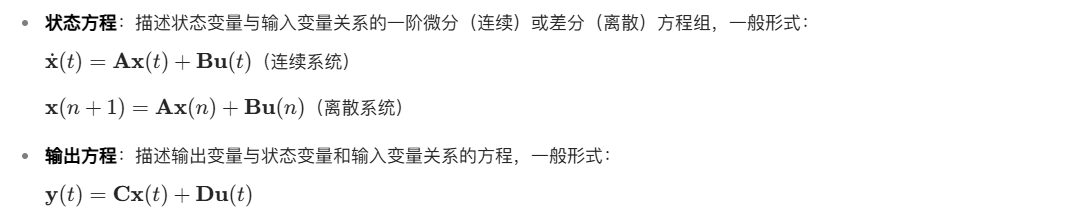
案例:RLC 串联电路状态方程建立
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 电路参数
R = 10 # 电阻(Ω)
L = 0.1 # 电感(H)
C = 1e-3 # 电容(F)
# 状态方程矩阵
A = np.array([
[0, 1/L],
[-1/C, -R/L]
])
B = np.array([
[0],
[1/L]
])
C = np.array([
[1, 0] # 输出为电容电压
])
D = np.array([
[0]
])
# 定义状态方程的微分形式
def state_eq(t, x):
# x: 状态变量 [电容电压, 电感电流]
# u: 输入电压,这里使用外部定义的input_signal函数
u = input_signal(t)
dx_dt = A @ x + B.flatten() * u # 注意这里将B向量展平
return dx_dt
# 初始状态
x0 = np.array([0, 0]) # 初始电容电压和电感电流为0
# 输入信号:单位阶跃函数
def input_signal(t):
return 1.0 if t >= 0 else 0.0
# 时间范围
t_span = (0, 1)
t_eval = np.linspace(0, 1, 1000)
# 正确求解状态方程
result = solve_ivp(
state_eq,
t_span,
x0,
t_eval=t_eval,
method='RK45'
)
# 提取状态变量
solution = result.y.T # 转置以获得形状为(n_samples, n_states)的数组
# 计算输出
y = np.array([C @ x for x in solution]).flatten()
# 绘制结果
plt.figure(figsize=(10, 6))
plt.plot(t_eval, y, 'b-', linewidth=2)
plt.xlabel('时间 (s)')
plt.ylabel('电容电压 (V)')
plt.title('RLC串联电路阶跃响应')
plt.grid(True)
plt.show()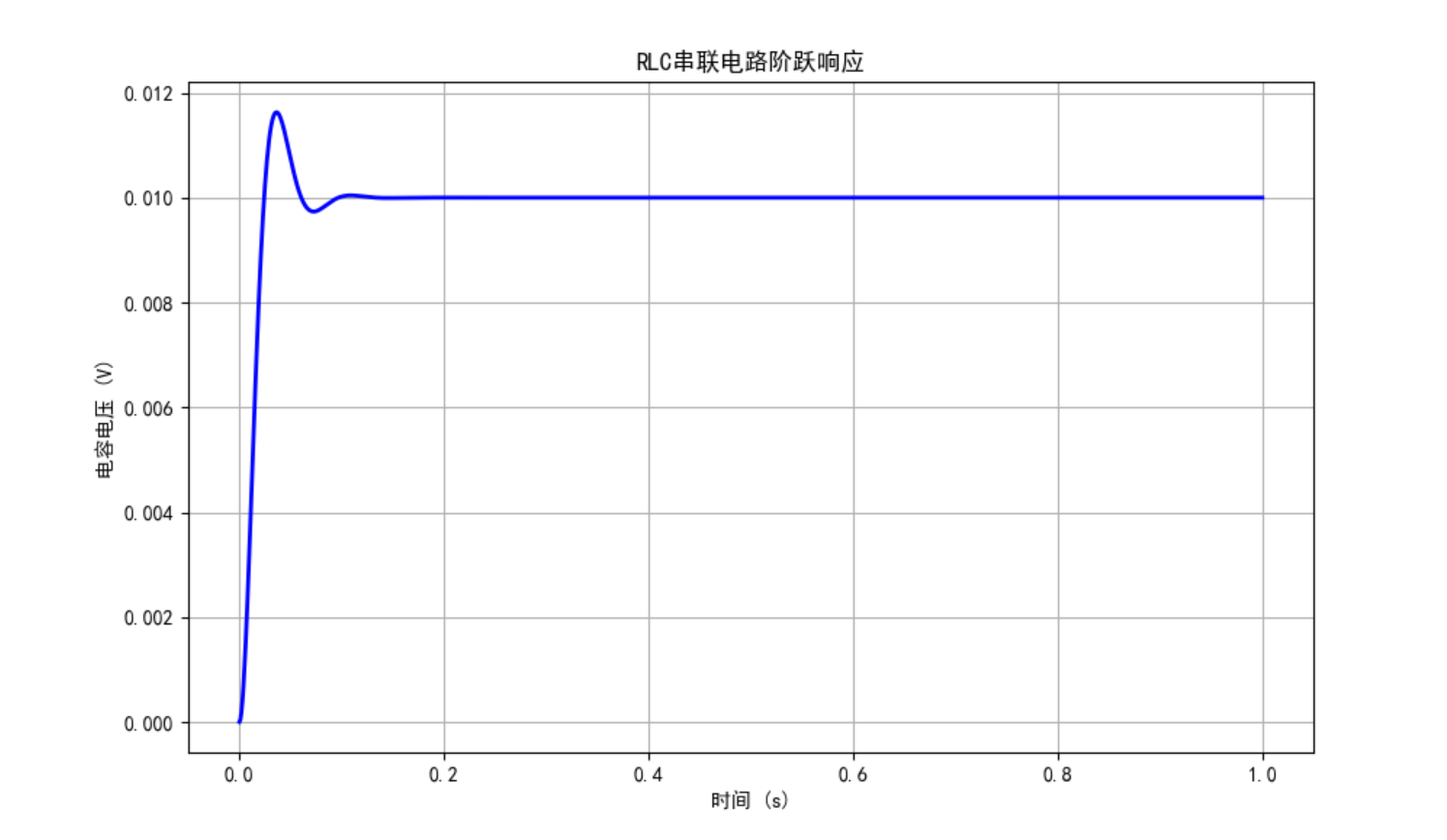
代码说明:
- 定义 RLC 电路参数,构建状态方程矩阵 A、B 和输出矩阵 C、D
- 使用 scipy.integrate.solve_ivp 求解微分方程
- 输入为单位阶跃函数,绘制电容电压的响应曲线
8.2 连续系统状态方程的建立
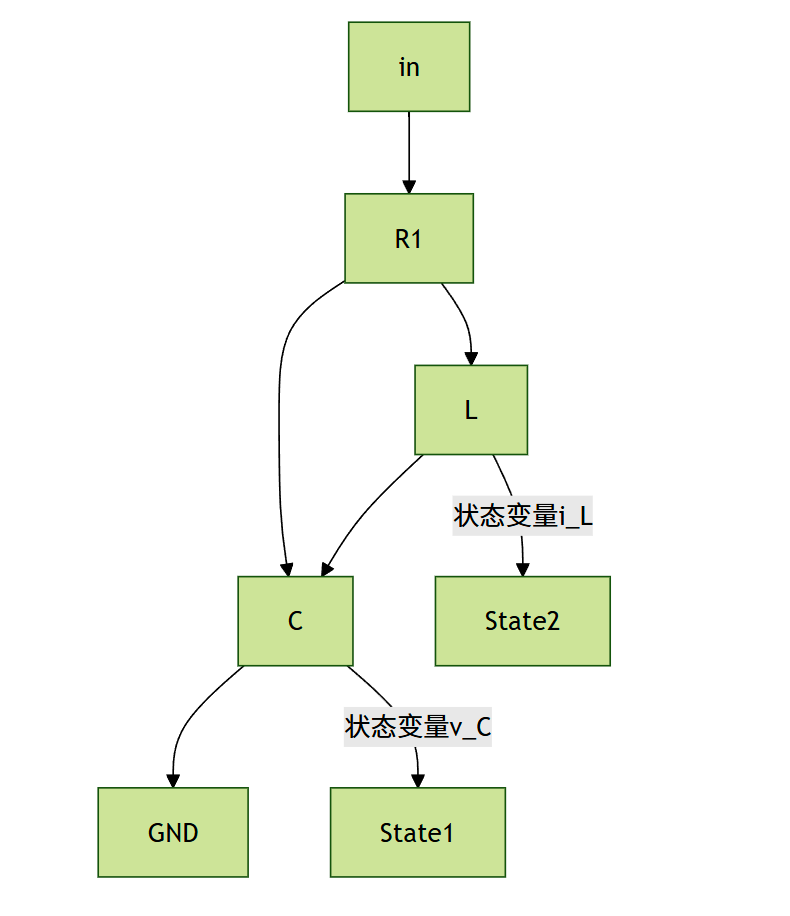
一、由电路图直接建立状态方程
步骤:
- 选择储能元件的物理量作为状态变量(电容电压、电感电流)
- 对每个储能元件应用基尔霍夫定律
- 整理得到状态方程和输出方程
案例:双储能元件电路状态方程
import sympy as sp
# 定义符号变量
s, t, v_C, i_L, v_in = sp.symbols('s t v_C i_L v_in')
R1, R2, L, C_cap = sp.symbols('R1 R2 L C') # 将C重命名为C_cap以避免冲突
# 定义表示导数的符号变量
dv_C_dt, di_L_dt = sp.symbols('dv_C_dt di_L_dt')
# 由电路图建立方程,用dv_C_dt和di_L_dt替换导数
eq1 = sp.Eq(C_cap * dv_C_dt, (v_in - v_C)/R1 - i_L)
eq2 = sp.Eq(L * di_L_dt, v_C - i_L * R2)
# 求解状态方程
state_eq = sp.solve([eq1, eq2], [dv_C_dt, di_L_dt])
# 构建状态矩阵A和输入矩阵B
A = sp.Matrix([
[ -1/(R1*C_cap), -1/C_cap ],
[ 1/L, -R2/L ]
])
B = sp.Matrix([
[ 1/(R1*C_cap) ],
[ 0 ]
])
# 输出方程:假设输出为电感电流
output_matrix = sp.Matrix([[0, 1]]) # 使用行向量表示输出矩阵
D = sp.Matrix([[0]]) # D矩阵也应该是二维的
# 打印状态方程
print("状态方程:")
print(f"dv_C/dt = {state_eq[dv_C_dt]}")
print(f"di_L/dt = {state_eq[di_L_dt]}")
# 打印矩阵形式
print("\n矩阵形式:")
print(f"A = \n{A}")
print(f"B = \n{B}")
print(f"输出矩阵 C = \n{output_matrix}")
print(f"D = \n{D}")二、由输入输出方程建立状态方程
方法:将 n 阶微分方程转化为 n 维状态空间方程,常用相变量法。
案例:三阶微分方程转化为状态方程
输入输出方程:

import sympy as sp
# 定义符号变量
s, t = sp.symbols('s t')
u = sp.Function('u')(t) # u是关于t的函数
y = sp.Function('y')(t) # y是关于t的函数
# 其中h0是一个常数,选择h0=1(因为输入导数的系数为1)
h0 = 1
# 输入输出微分方程
ode = sp.Eq(sp.diff(y, t, t) + 3*sp.diff(y, t) + 2*y,
sp.diff(u, t) + 4*u)
# 定义状态变量 - 修正:将h0的定义移到此处之前
x1 = y
x2 = sp.diff(y, t) - h0 * u
# 状态方程
dx1_dt = x2 + h0 * u
dx2_dt = -2*x1 - 3*x2 + (4 - 3*h0) * u
# 构建状态矩阵
A = sp.Matrix([
[0, 1],
[-2, -3]
])
B = sp.Matrix([
[h0],
[4 - 3*h0]
])
C = sp.Matrix([[1, 0]]) # 输出y = x1
D = sp.Matrix([[h0]]) # D矩阵不为零
# 打印结果
print("状态方程矩阵:")
print(f"A = \n{A}")
print(f"B = \n{B}")
print(f"C = \n{C}")
print(f"D = \n{D}")8.3 离散系统状态方程的建立与模拟
一、由输入输出方程建立状态方程
案例:二阶差分方程转化为状态方程
输入输出方程:(y(n) + 0.5y(n-1) + 0.06y(n-2) = u(n) + u(n-1))
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 确保使用交互式后端并指定Qt5Agg(Windows系统推荐)
plt.switch_backend('Qt5Agg')
plt.ion() # 启用交互模式
# 差分方程系数
a1, a2 = 0.5, 0.06 # y(n) + a1y(n-1) + a2y(n-2) = ...
b0, b1 = 1, 1 # ... = b0u(n) + b1u(n-1)
# 构建正确的状态方程 - 使用一维数组表示行向量
A = np.array([
[-a1, -a2],
[1, 0]
])
B = np.array([1, 0]) # 一维数组(行向量)
C = np.array([b1, b0 - a1*b1]) # 一维数组(行向量)
D = np.array([b0 - a1*b1 - a2*b0]) # 一维数组(行向量)
# 系统模拟:计算单位脉冲响应
N = 50 # 计算点数
h = np.zeros(N)
x = np.zeros(2) # 初始状态
for n in range(N):
u = 1 if n == 0 else 0 # 单位脉冲输入
y = C @ x + D * u # 标量值
h[n] = y # 直接赋值
x = A @ x + B * u # 更新状态
# 绘制脉冲响应并显示
plt.figure(figsize=(10, 6))
plt.stem(range(N), h, 'b-', linefmt='b-', markerfmt='bo')
plt.xlabel('n')
plt.ylabel('h(n)')
plt.title('离散系统脉冲响应(状态方程法)')
plt.grid(True)
plt.show(block=False) # 非阻塞显示
# 直接求解差分方程
h_direct = np.zeros(N)
for n in range(N):
u = 1 if n == 0 else 0
h_direct[n] = b0*u
if n >= 1:
h_direct[n] += b1*u - a1*h_direct[n-1]
if n >= 2:
h_direct[n] -= a2*h_direct[n-2]
# 比较两种方法结果
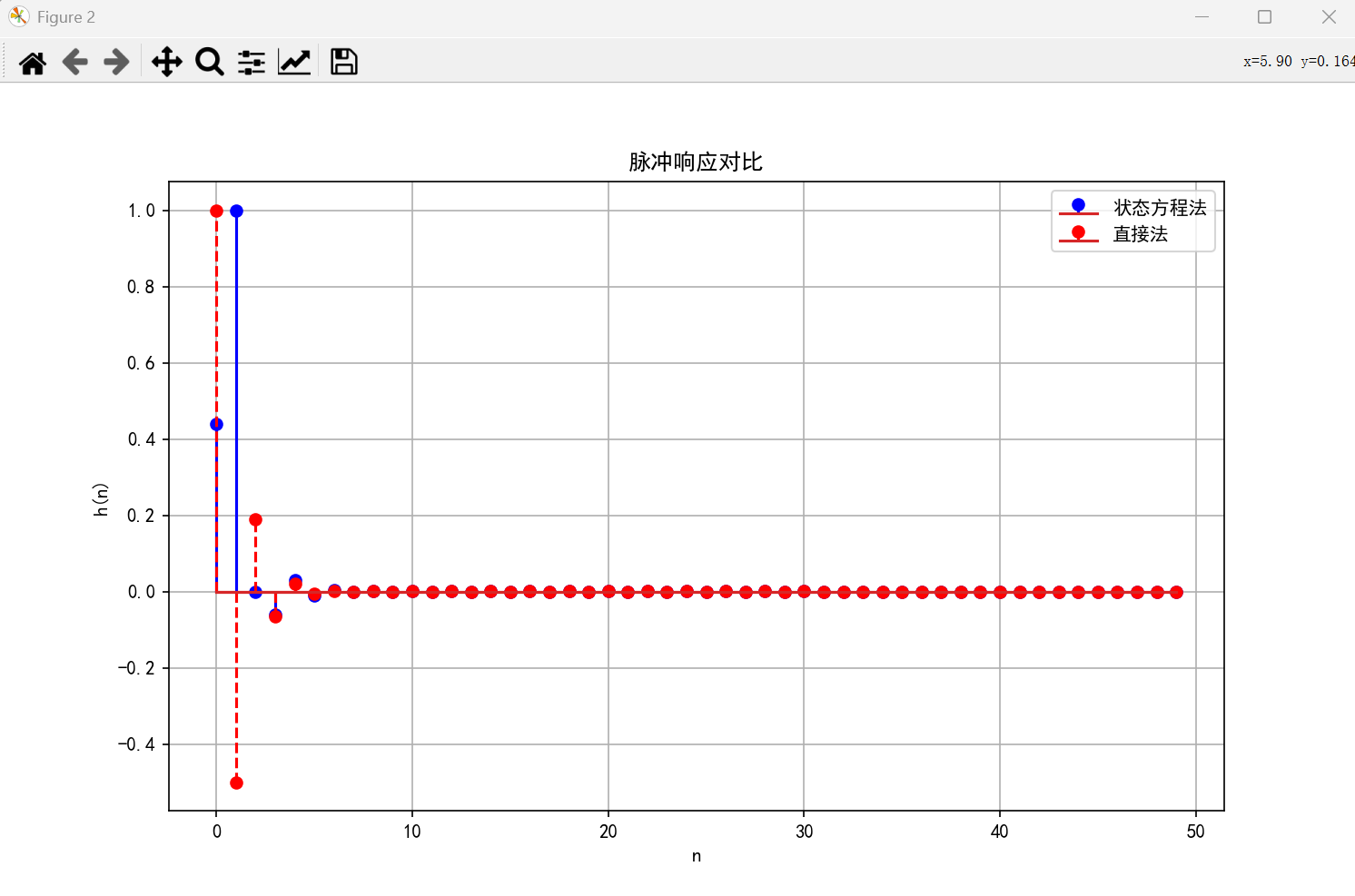
plt.figure(figsize=(10, 6))
plt.stem(range(N), h, 'b-', linefmt='b-', markerfmt='bo', label='状态方程法')
plt.stem(range(N), h_direct, 'r--', linefmt='r--', markerfmt='ro', label='直接法')
plt.xlabel('n')
plt.ylabel('h(n)')
plt.title('脉冲响应对比')
plt.legend()
plt.grid(True)
plt.show(block=False) # 非阻塞显示
# 计算误差
error = np.sum((h - h_direct)** 2)
print(f"两种方法的均方误差: {error:.6f}")
# 保持程序运行,防止图像窗口关闭
try:
plt.pause(10) # 暂停10秒显示图像
except KeyboardInterrupt:
pass
# 或者使用input()保持程序运行
input("按Enter键退出...")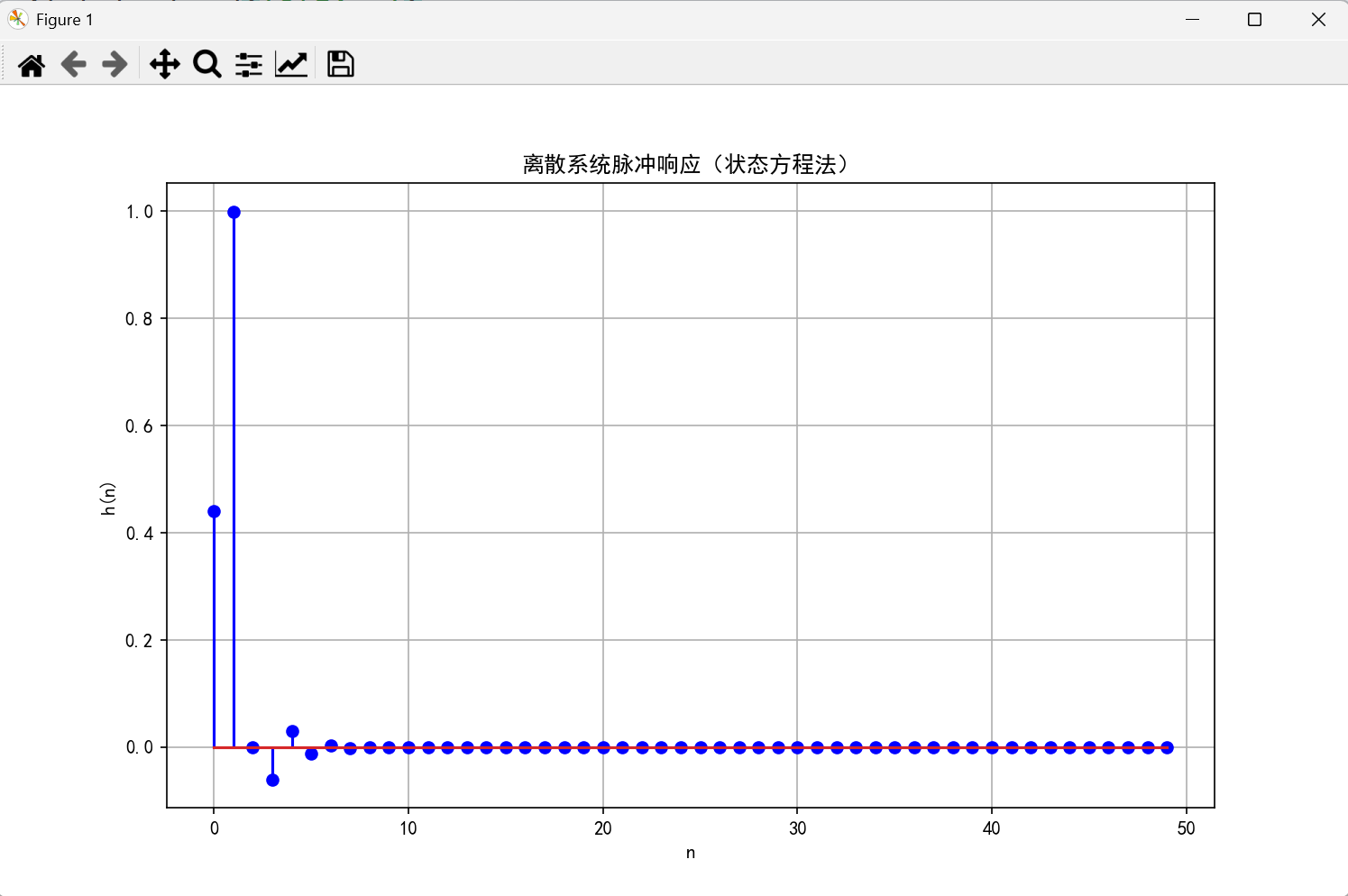
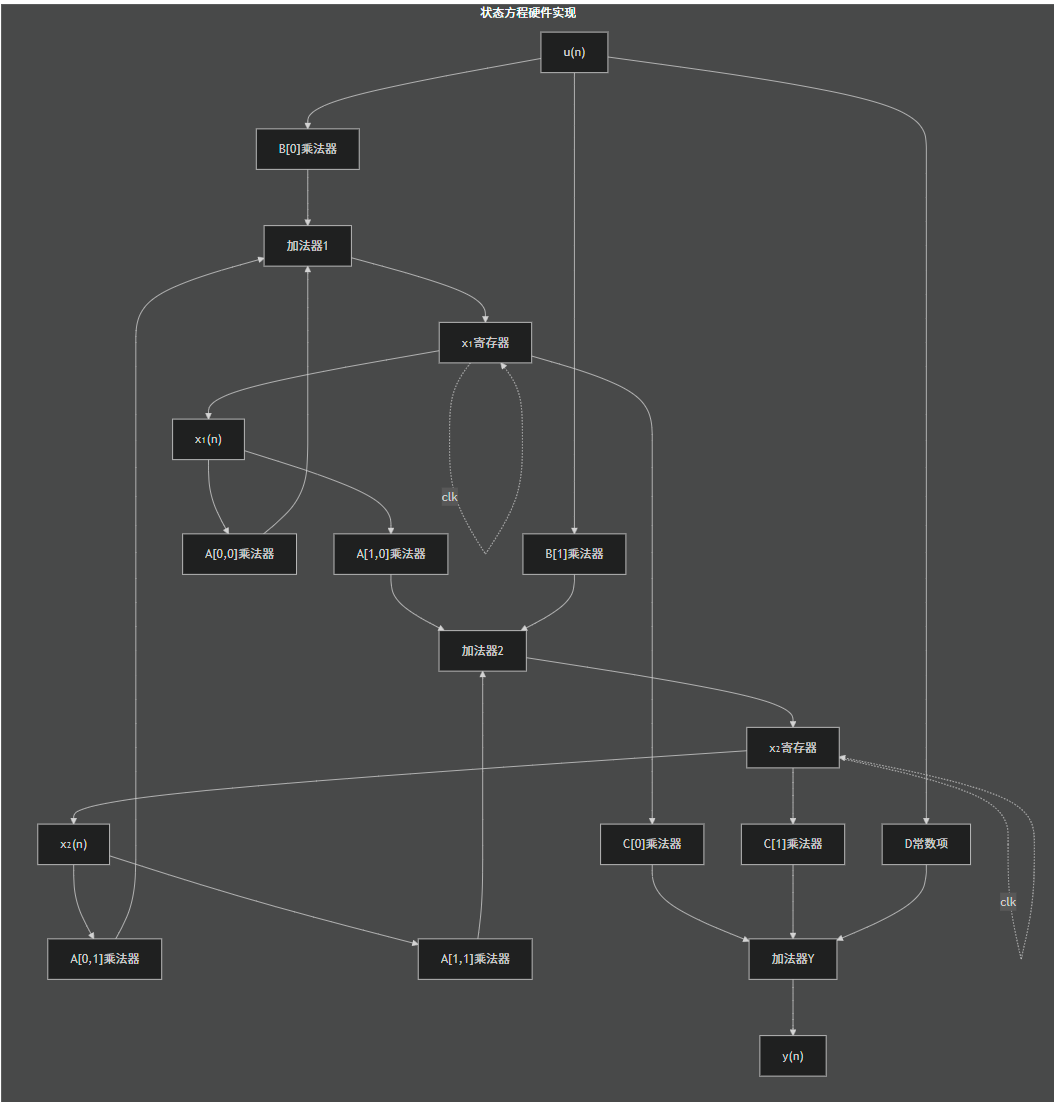
二、由状态方程进行系统模拟
8.4 连续系统状态方程的求解
一、用拉普拉斯变换法求解状态方程

案例:一阶系统状态方程求解
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
import matplotlib as mpl
# 确保使用交互式后端并指定Qt5Agg(Windows系统推荐)
plt.switch_backend('Qt5Agg')
plt.ion() # 启用交互模式
# 解决中文显示问题和下标问题
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题
# 状态方程矩阵
A = np.array([[-2, 1], [0, -3]])
B = np.array([[1], [1]])
C = np.array([[1, 0]])
D = np.array([[0]])
# 初始状态
x0 = np.array([1, 0])
# 输入信号:指数函数u(t) = e^(-t)u(t)
def u(t):
return np.exp(-t)
# 使用ODE求解器计算状态响应
def state_equation(t, x):
return A @ x + B.flatten() * u(t)
# 时间范围
t_span = (0, 5)
t_eval = np.linspace(0, 5, 100)
# 使用ODE求解器求解状态方程
sol = solve_ivp(state_equation, t_span, x0, t_eval=t_eval)
x_states = sol.y.T # 状态向量,形状为(100, 2)
# 正确计算输出 y(t) = C*x(t) + D*u(t)
u_vals = u(t_eval)
y_output = (C @ x_states.T).flatten() + (D * u_vals).flatten()
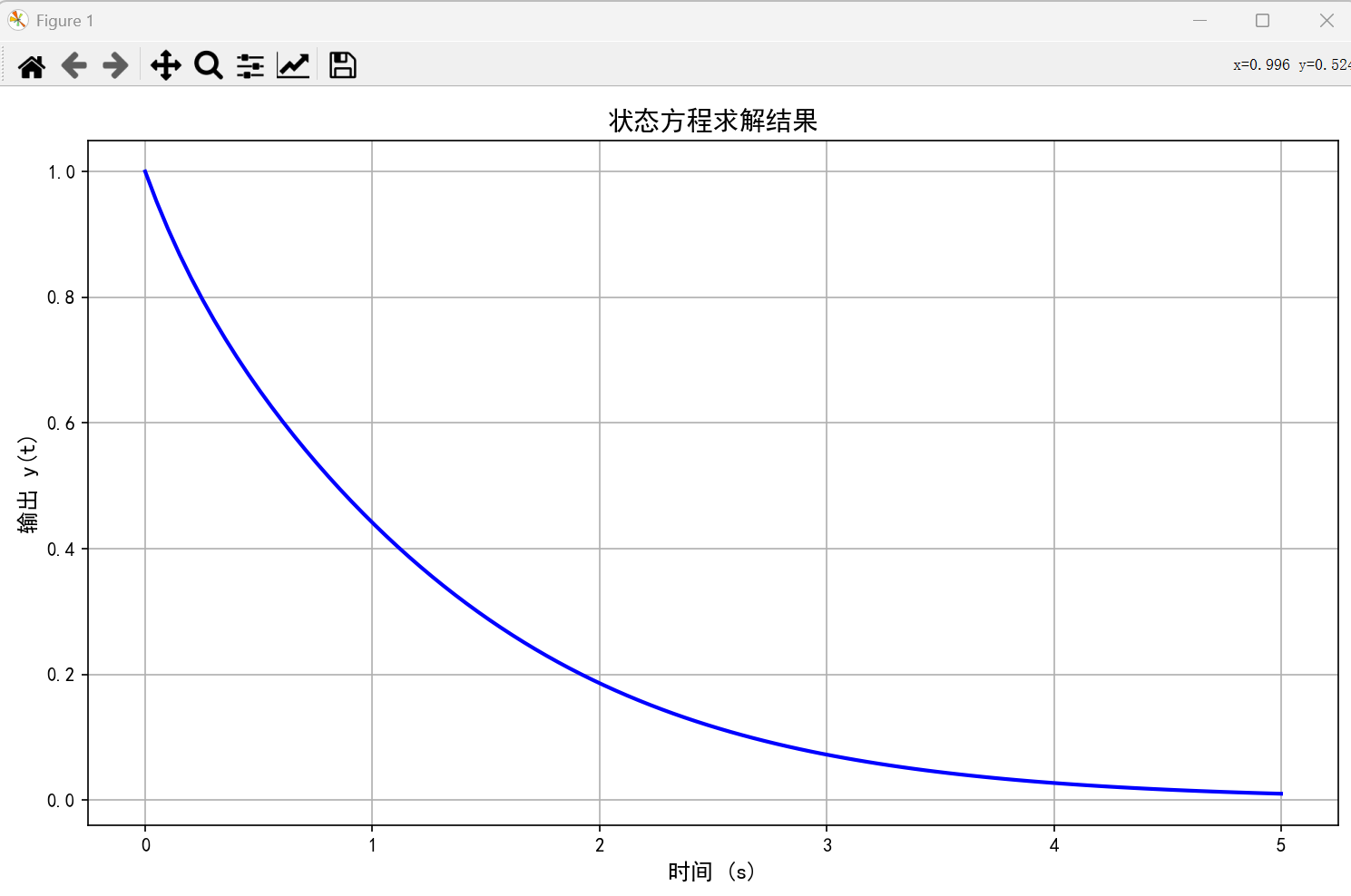
# 绘制结果 - 只显示输出
plt.figure(figsize=(10, 6))
plt.plot(t_eval, y_output, 'b-', linewidth=2)
plt.xlabel('时间 (s)', fontsize=12)
plt.ylabel('输出 y(t)', fontsize=12)
plt.title('状态方程求解结果', fontsize=14)
plt.grid(True)
plt.tight_layout()
plt.show()
# 绘制状态变量变化 - 使用普通数字代替下标
plt.figure(figsize=(12, 8))
plt.subplot(2, 1, 1)
plt.plot(t_eval, x_states[:, 0], 'r-', label='x1(t)')
plt.plot(t_eval, x_states[:, 1], 'g-', label='x2(t)')
plt.xlabel('时间 (s)', fontsize=12)
plt.ylabel('状态变量', fontsize=12)
plt.legend(fontsize=10)
plt.title('状态变量变化', fontsize=14)
plt.grid(True)
plt.subplot(2, 1, 2)
plt.plot(t_eval, y_output, 'b-', label='y(t)')
plt.xlabel('时间 (s)', fontsize=12)
plt.ylabel('输出', fontsize=12)
plt.title('系统输出', fontsize=14)
plt.grid(True)
plt.tight_layout()
plt.show()
# 保持程序运行,防止图像窗口关闭
try:
plt.pause(10) # 暂停10秒显示图像
except KeyboardInterrupt:
pass
# 或者使用input()保持程序运行
input("按Enter键退出...")
print("绘图完成!图像已显示")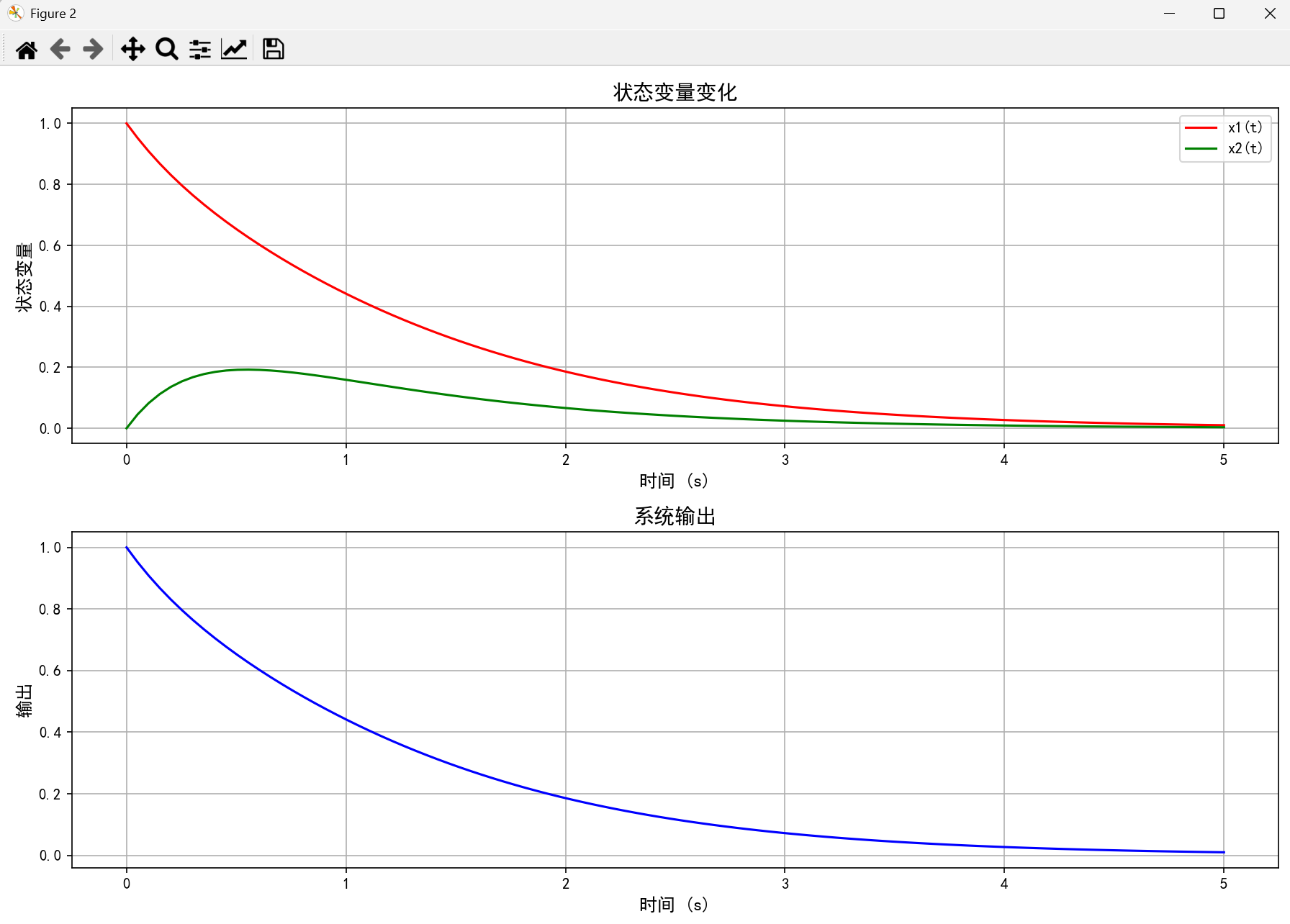
二、系统函数矩阵 H (s) 与系统稳定性的判断

案例:系统稳定性分析
import numpy as np
from scipy import linalg
import matplotlib.pyplot as plt
import matplotlib as mpl
# 解决中文显示问题
plt.rcParams['font.sans-serif'] = ['SimHei'] # 使用黑体显示中文
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题
mpl.rcParams['font.family'] = 'sans-serif' # 设置全局字体
# 状态方程矩阵
A = np.array([
[-1, 1, 0],
[0, -2, 1],
[0, 0, -3]
])
B = np.array([[1], [1], [1]])
C = np.array([[1, 0, 0]])
D = np.array([[0]])
# 计算系统极点(A矩阵特征值)
eigenvalues = linalg.eigvals(A)
real_parts = np.real(eigenvalues)
imag_parts = np.imag(eigenvalues)
# 判断稳定性
is_stable = all(real_parts < 0)
# 绘制极点位置(优化可视化)
plt.figure(figsize=(8, 6))
plt.scatter(real_parts, imag_parts, color='red', s=100, marker='o', zorder=3)
# 绘制坐标轴和网格
plt.axvline(x=0, color='k', linestyle='--', alpha=0.7) # 虚轴
plt.axhline(y=0, color='k', alpha=0.7) # 实轴
plt.grid(True, linestyle='--', alpha=0.7)
# 添加极点标签
for i, (re, im) in enumerate(zip(real_parts, imag_parts)):
if abs(im) < 1e-6: # 实极点
plt.text(re+0.1, im+0.1, f'λ{i+1}={re:.1f}', fontsize=10)
else: # 复极点
plt.text(re+0.1, im+0.1, f'λ{i+1}={re:.1f}{"+" if im>=0 else ""}{im:.1f}j', fontsize=10)
# 标记稳定性
stability_text = "系统稳定(所有极点在左半平面)" if is_stable else "系统不稳定(存在右半平面极点)"
plt.text(min(real_parts)-0.5, max(imag_parts)+0.5, stability_text,
fontsize=12, fontweight='bold',
bbox=dict(facecolor='white', alpha=0.8))
# 设置坐标轴范围和标签
plt.xlabel('实部', fontsize=12)
plt.ylabel('虚部', fontsize=12)
plt.title('三阶系统极点分布图', fontsize=14, fontweight='bold')
plt.axis('equal')
plt.tight_layout()
plt.show()
# 打印结果(格式化输出)
print("="*50)
print("系统极点分析结果:")
print("-"*50)
for i, val in enumerate(eigenvalues):
if np.imag(val) == 0:
print(f"极点 {i+1}: λ={val.real:.2f}(实极点)")
else:
print(f"极点 {i+1}: λ={val.real:.2f}{'+' if val.imag>0 else ''}{val.imag:.2f}j(复极点)")
print("-"*50)
print(f"系统稳定性: {'稳定' if is_stable else '不稳定'}")
print("="*50)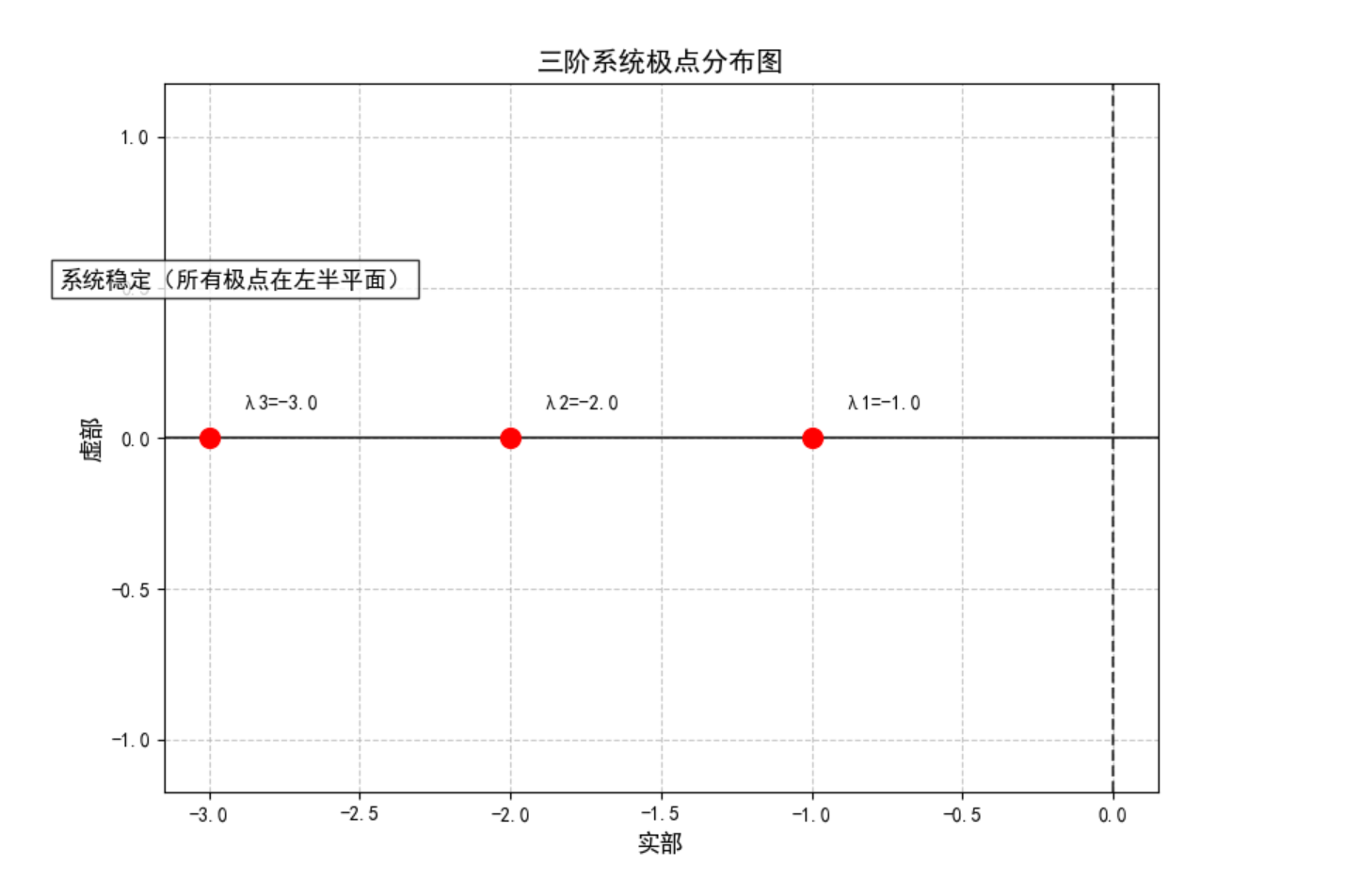
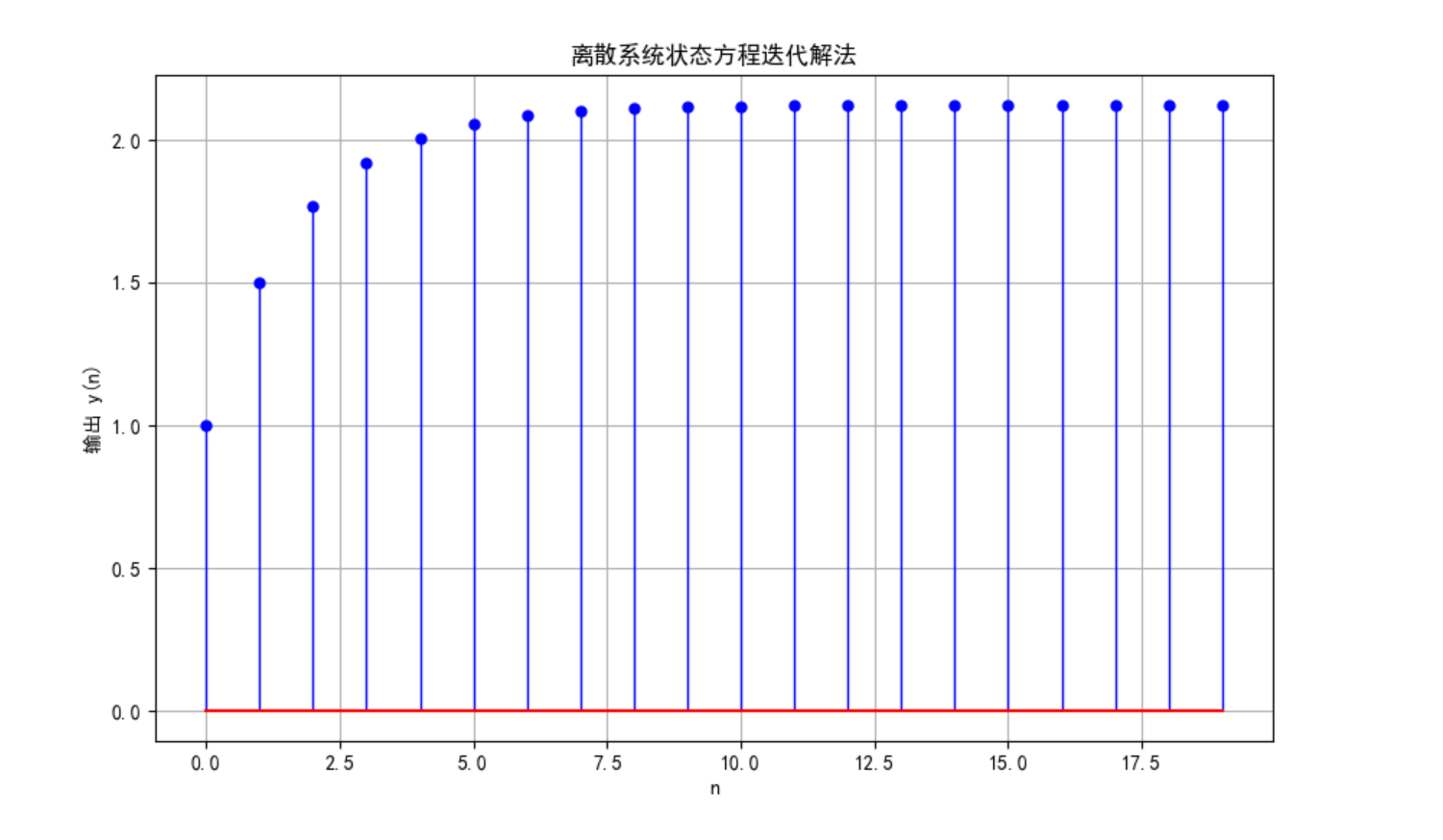
8.5 离散系统状态方程的求解
一、用 z 变换求解离散系统的状态方程

案例:离散系统阶跃响应求解
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 状态方程矩阵
A = np.array([[0.5, 0.1], [0.2, 0.3]])
B = np.array([1, 0]) # 修改为一维数组
C = np.array([1, 0]) # 修改为一维数组
D = 0 # 标量值
# 初始状态
x = np.array([1.0, 0.0]) # 确保为浮点数
# 输入信号:单位阶跃函数u(n) = u(n)
def u(n):
return 1.0 if n >= 0 else 0.0 # 返回浮点数
# 计算范围
n_vals = np.arange(0, 20)
y = np.zeros(len(n_vals))
# 存储状态历史
x_history = np.zeros((len(n_vals), 2))
# 计算状态和输出(迭代法)
for i, n_val in enumerate(n_vals):
# 计算输出 (确保结果为标量)
y[i] = np.dot(C, x) + D * u(n_val)
# 保存当前状态
x_history[i] = x
# 更新下一状态(如果还没到末尾)
if i < len(n_vals) - 1:
# 状态更新: x[n+1] = A @ x[n] + B @ u[n]
x = np.dot(A, x) + B * u(n_val)
# 绘制结果
plt.figure(figsize=(10, 6))
markerline, stemlines, baseline = plt.stem(n_vals, y, linefmt='b-', markerfmt='bo', basefmt='r-')
plt.setp(markerline, markersize=5)
plt.setp(stemlines, linewidth=1)
plt.xlabel('n')
plt.ylabel('输出 y(n)')
plt.title('离散系统状态方程迭代解法')
plt.grid(True)
plt.show()
# 可选:绘制状态变量变化
plt.figure(figsize=(12, 8))
plt.subplot(2, 1, 1)
plt.stem(n_vals, x_history[:, 0], linefmt='r-', markerfmt='ro', label='x1(n)')
plt.stem(n_vals, x_history[:, 1], linefmt='g-', markerfmt='go', label='x2(n)')
plt.xlabel('n')
plt.ylabel('状态变量')
plt.legend()
plt.title('状态变量变化')
plt.grid(True)
plt.subplot(2, 1, 2)
plt.stem(n_vals, y, linefmt='b-', markerfmt='bo', label='y(n)')
plt.xlabel('n')
plt.ylabel('输出')
plt.title('系统输出')
plt.grid(True)
plt.tight_layout()
plt.show()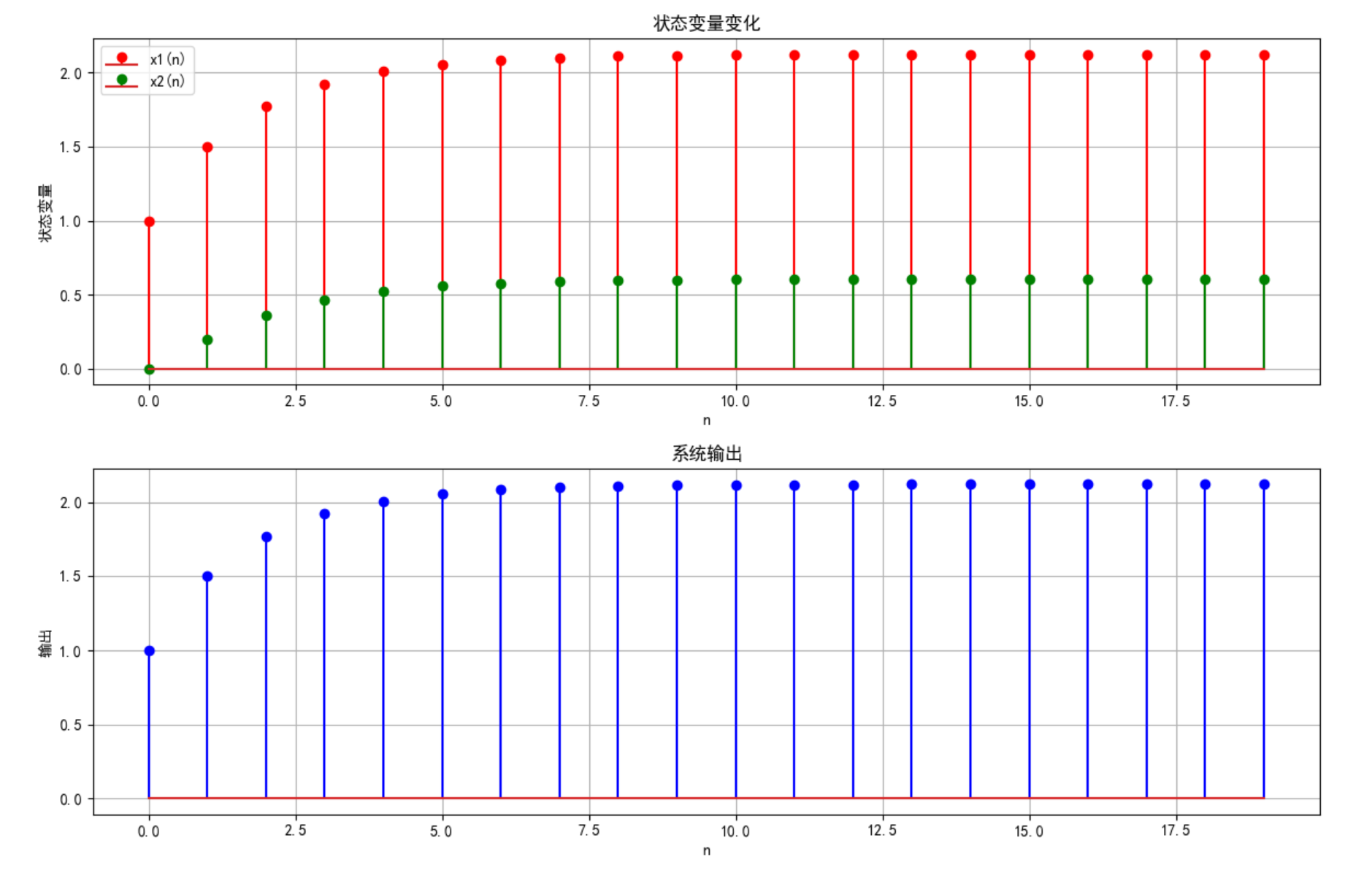
二、系统函数矩阵 H (z) 与系统稳定性的判断

案例:离散系统稳定性分析
import numpy as np
from scipy import linalg
import matplotlib.pyplot as plt
import matplotlib as mpl
# 解决中文显示问题
plt.rcParams['font.sans-serif'] = ['SimHei'] # 使用黑体显示中文
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题
mpl.rcParams['font.family'] = 'sans-serif' # 设置全局字体
# 状态方程矩阵
A = np.array([
[0.5, 0.3],
[-0.2, 0.4]
])
B = np.array([[1], [1]])
C = np.array([[1, 0]])
D = np.array([[0]])
# 计算系统函数矩阵H(z)的极点
# 极点为A矩阵的特征值
eigenvalues = linalg.eigvals(A)
# 判断稳定性
is_stable = all(np.abs(eigenvalues) < 1)
# 绘制极点位置(单位圆内)
theta = np.linspace(0, 2*np.pi, 100)
plt.figure(figsize=(8, 8))
# 绘制单位圆
plt.plot(np.cos(theta), np.sin(theta), 'k--', linewidth=1.5, label='单位圆')
# 绘制极点
plt.plot(np.real(eigenvalues), np.imag(eigenvalues), 'ro', markersize=10, label='极点')
# 添加坐标轴
plt.axhline(y=0, color='k', linestyle='-', alpha=0.5) # 实轴
plt.axvline(x=0, color='k', linestyle='-', alpha=0.5) # 虚轴
# 设置网格和标签
plt.grid(True, linestyle='--', alpha=0.7)
plt.xlabel('实部')
plt.ylabel('虚部')
plt.title('离散系统极点分布')
plt.axis('equal')
# 设置坐标轴范围
plt.xlim(-1.2, 1.2)
plt.ylim(-1.2, 1.2)
# 标记稳定性
if is_stable:
plt.text(-1.15, 1.15,
'系统稳定(所有极点在单位圆内)',
fontsize=12, color='g')
else:
plt.text(-1.15, 1.15,
'系统不稳定(存在单位圆外极点)',
fontsize=12, color='r')
# 添加图例
plt.legend(loc='best')
plt.tight_layout()
plt.show()
# 打印结果
print("="*50)
print("离散系统稳定性分析结果:")
print("-"*50)
print(f"A矩阵特征值: {eigenvalues}")
print(f"特征值模长: {np.abs(eigenvalues)}")
print(f"系统稳定性: {'稳定' if is_stable else '不稳定'}")
print("="*50)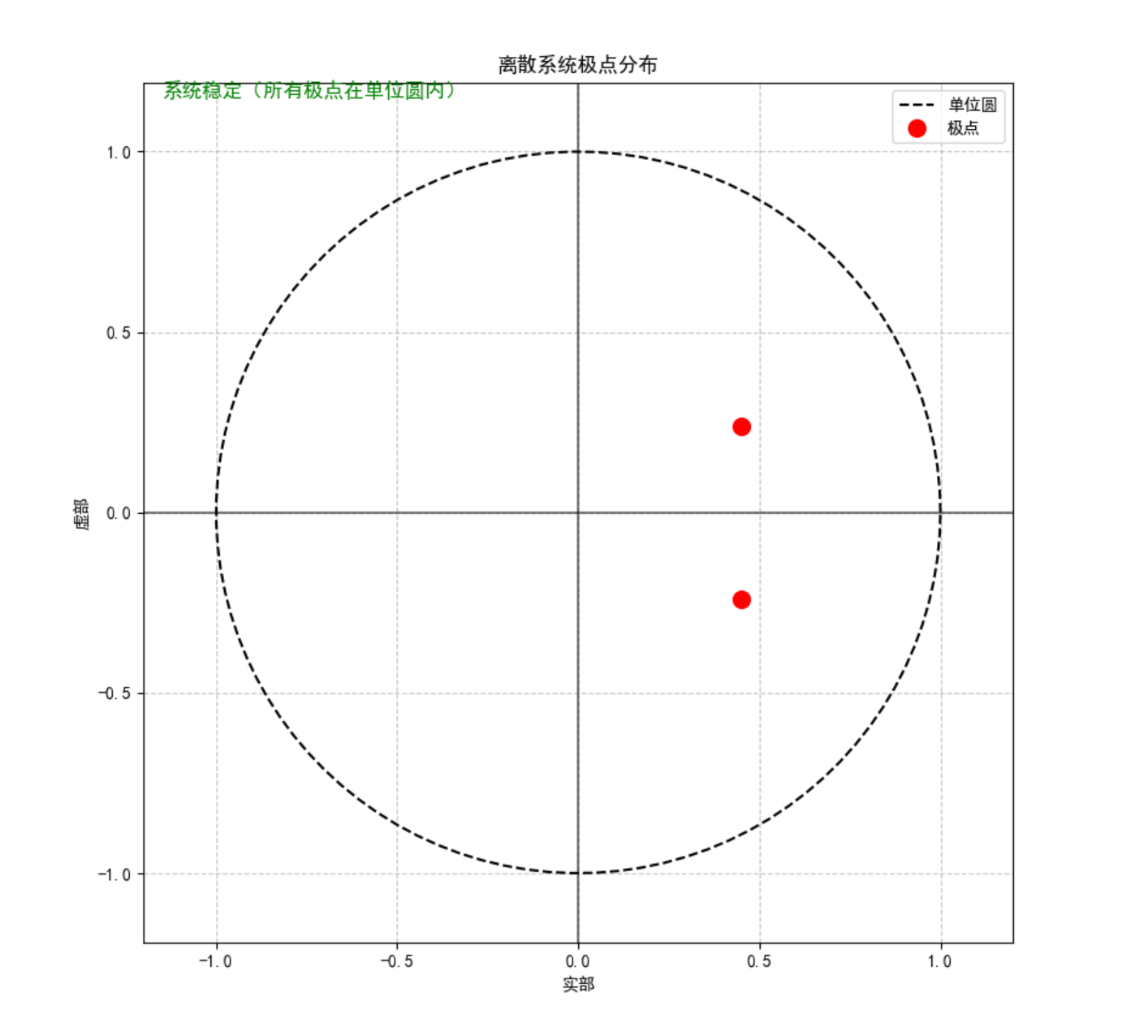
*8.6 系统的可控性和可观测性
一、状态矢量的线性变换

二、系统的可控性和可观测性

案例:系统可控性和可观测性分析
import numpy as np
import sys
from scipy import linalg
# 状态方程矩阵
A = np.array([
[0, 1, 0],
[0, 0, 1],
[-6, -11, -6]
])
B = np.array([[0], [0], [1]])
C = np.array([[1, 0, 0]])
# 计算可控性矩阵M
n = A.shape[0] # 状态变量维数
M = np.hstack([np.linalg.matrix_power(A, i) @ B for i in range(n)])
# 计算可观测性矩阵N
N = np.vstack([C @ np.linalg.matrix_power(A, i) for i in range(n)])
# 计算秩
rank_M = np.linalg.matrix_rank(M)
rank_N = np.linalg.matrix_rank(N)
# 判断可控性和可观测性
is_controllable = rank_M == n
is_observable = rank_N == n
# 打印结果
print("=" * 60)
print("系统可控性与可观测性分析")
print("=" * 60)
print("可控性矩阵M:")
print(M)
print(f"可控性矩阵秩: {rank_M} (系统维度: {n})")
print(f"系统可控性: {'可控' if is_controllable else '不可控'}")
print("\n可观测性矩阵N:")
print(N)
print(f"可观测性矩阵秩: {rank_N} (系统维度: {n})")
print(f"系统可观测性: {'可观测' if is_observable else '不可观测'}")
print("=" * 60)
# 线性变换示例:对角化A矩阵
# 计算特征值和特征向量
eigenvalues, V = linalg.eig(A)
# 检查特征向量矩阵是否可逆
if np.linalg.cond(V) < 1 / sys.float_info.epsilon:
# 变换矩阵P(特征向量矩阵)
P = V
# 变换后矩阵
A_bar = np.linalg.inv(P) @ A @ P
B_bar = np.linalg.inv(P) @ B
C_bar = C @ P
print("\n线性变换后矩阵:")
print("A_bar =")
print(np.real_if_close(A_bar)) # 只显示实数部分(如果接近实数)
print("\nB_bar =")
print(np.real_if_close(B_bar))
print("\nC_bar =")
print(np.real_if_close(C_bar))
# 检查变换后系统特性是否保持
print("\n变换后系统特性验证:")
M_bar = np.hstack([np.linalg.matrix_power(A_bar, i) @ B_bar for i in range(n)])
N_bar = np.vstack([C_bar @ np.linalg.matrix_power(A_bar, i) for i in range(n)])
print(f"变换后可控性矩阵秩: {np.linalg.matrix_rank(M_bar)}")
print(f"变换后可观测性矩阵秩: {np.linalg.matrix_rank(N_bar)}")
print("=" * 60)
else:
print("\n警告:特征向量矩阵不可逆,无法进行对角化变换")
print("=" * 60)
# 系统实现分析
print("\n系统实现分析:")
if is_controllable and is_observable:
print("系统是既可控又可观测的最小实现")
elif is_controllable:
print("系统可控但不可观测")
elif is_observable:
print("系统可观测但不可控")
else:
print("系统既不可控也不可观测")
print("=" * 60)总结
状态变量分析是现代控制理论的基础,通过将系统表示为状态方程和输出方程,能够更全面地描述系统内部状态。本章重点包括:
- 状态变量的选择与状态方程建立
- 连续与离散系统状态方程的求解方法
- 系统函数矩阵与稳定性分析
- 系统可控性和可观测性的判断
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2026-01-20,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号