【算法基础篇】(三十四)图论基础深度解析:从概念到代码,玩转图的存储与遍历

【算法基础篇】(三十四)图论基础深度解析:从概念到代码,玩转图的存储与遍历
_OP_CHEN
发布于 2026-01-14 11:48:56
发布于 2026-01-14 11:48:56
前言
在数据结构的世界里,线性表是简单的 “排队”,树是层次分明的 “家族树”,而图则是打破所有束缚的 “社交网络”—— 任意两个节点都能自由建立连接,复杂却又充满规律。作为算法面试和工程实践的核心基础,图论的重要性无需多言。今天这篇文章,我们就从最底层的概念入手,结合生动案例和可直接运行的 C++ 代码,手把手带你吃透图的基本概念、存储方式与遍历算法,让你从 “图盲” 变身 “图论入门高手”!下面就让我们正式开始吧!
一、图的基本概念:搞懂这些,才算真正入门
在正式敲代码之前,我们必须先理清图论的核心概念。很多人觉得图论抽象,其实只要把 “顶点” 看作 “人”,“边” 看作 “人与人之间的关系”,一切都会变得通俗易懂。
1.1 图的定义:不止是 “点” 和 “线” 的组合
从学术角度来说,图(Graph)是由顶点集(V) 和边集(E) 组成的二元组,记为 G = (V, E)。其中:
- 顶点集 V 是有限非空集合,每个元素称为顶点(Vertex),可以理解为 “社交网络里的人”;
- 边集 E 是顶点之间关系的集合,每条边(Edge)连接两个顶点,对应 “人与人之间的朋友关系”。
我们用 |V| 表示顶点个数(也称图的 “阶”),用 |E| 表示边的条数。举个例子:微信好友网络中,每个用户是顶点,两个用户之间的好友关系就是一条边,整个微信好友网络就是一个庞大的图。
这里必须强调图与线性表、树的核心区别:
- 线性表:元素间是 “一对一” 关系(除首尾元素外,每个元素只有一个前驱和一个后继),比如排队买奶茶的队伍;
- 树:元素间是 “一对多” 关系(每个元素有唯一双亲,可有多个子节点),比如公司的组织架构图;
- 图:元素间是 “多对多” 关系(任意两个顶点都可能相连),比如城市交通网络、社交关系网。
正是这种 “多对多” 的灵活性,让图成为描述复杂关系的最佳数据结构。
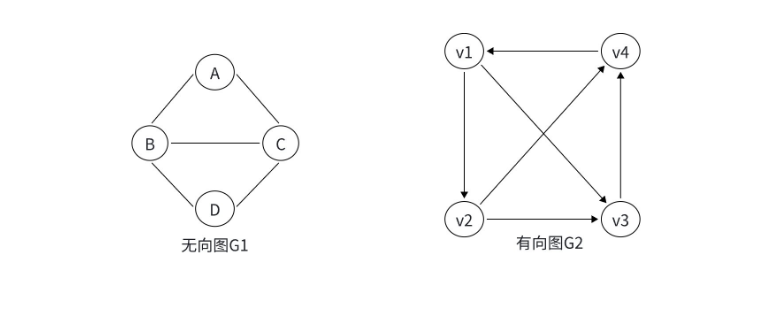
1.2 有向图和无向图:关系是 “双向奔赴” 还是 “单向暗恋”
根据边是否有方向,图可以分为无向图和有向图,这是图论中最基础的分类。
无向图:双向可达的 “对等关系”
无向图中的边没有方向,连接顶点 u 和 v 的边可以表示为 (u, v),且 (u, v) = (v, u)。比如:
- 城市道路中,双向车道就是无向边(从 A 市到 B 市和从 B 市到 A 市走的是同一条路);
- 微信好友关系也是无向边(你加了别人好友,别人也自动成为你的好友)。
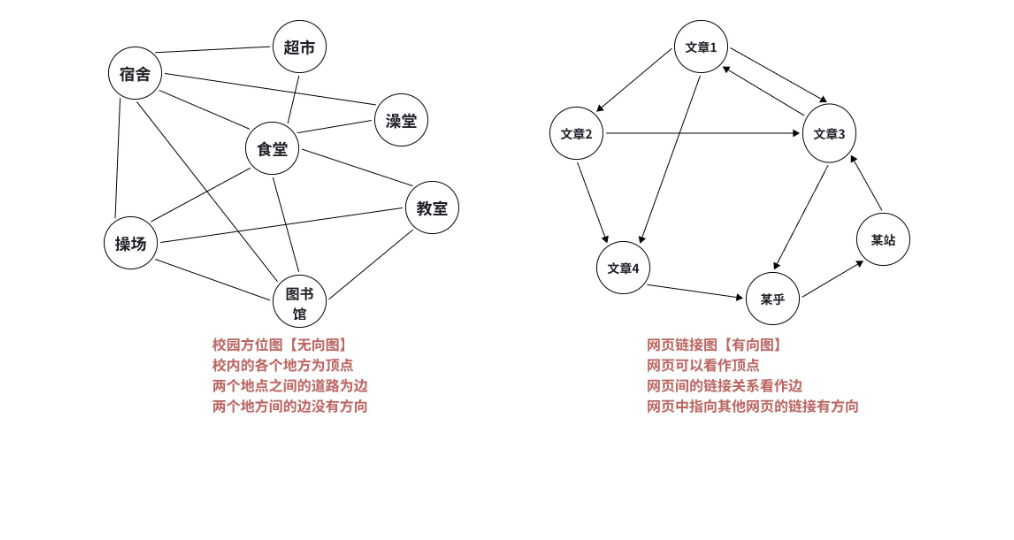
文档中的 “校园方位图” 就是典型的无向图:宿舍、食堂、图书馆等地点是顶点,连接这些地点的道路是无向边,你可以从宿舍走到食堂,也能从食堂走回宿舍。
有向图:单向通行的 “依赖关系”
有向图中的边有明确方向,连接顶点 u 和 v 的边表示为 <u, v>,表示从 u 指向 v,且 <u, v> ≠ <v, u>。比如:
- 城市道路中的单行线(只能从 A 路开往 B 路,不能反向);
- 网页链接(从网页 A 点击链接跳转到网页 B,不代表能从 B 跳回 A);
- 课程学习依赖(必须先学《高等数学》才能学《线性代数》,这就是一条从 “高数” 指向 “线代” 的有向边)。
文档中的 “网页链接图” 就是有向图:每个网页是顶点,链接是有向边,方向由 “当前网页” 指向 “目标网页”。
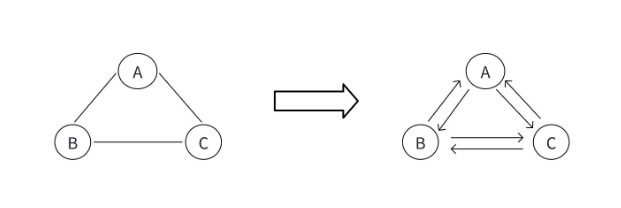
这里有个实用技巧:在算法实现中,我们可以把无向边看作两条方向相反的有向边(比如无向边 (u, v) 等价于有向边 <u, v> 和 <v, u>),这样就能统一用有向图的逻辑处理所有图,简化代码实现。
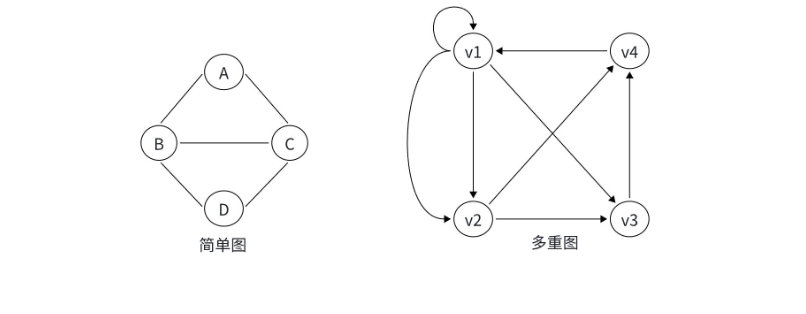
1.3 简单图与多重图:关系是否 “唯一”
现实中,两个人可能有多种联系方式(微信、电话、短信),对应到图中,就有了简单图和多重图的区别。
关键定义:
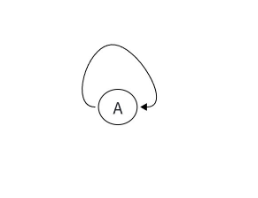
- 自环:顶点自己指向自己的边(比如一个网页有指向自身的链接);
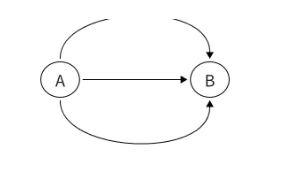
- 重边:两个顶点之间存在两条或以上完全相同的边(比如从 A 市到 B 市有两条不同的高速公路)。
分类:
- 简单图:没有自环和重边的图(大部分算法问题默认是简单图);
- 多重图:存在自环或重边的图(比如交通网络中,A 和 B 之间可能有普通公路和高铁两条边)。
下图分别为自环和重边:
比如:社交网络中,你和朋友之间只有 “好友” 这一种关系,对应简单图;而城市交通网络中,A 和 B 之间可能有公交、地铁、自驾三条路径,对应多重图。
1.4 稠密图和稀疏图:关系是 “密集” 还是 “稀疏”
根据边的条数多少,图可以分为稠密图和稀疏图,这直接决定了我们选择哪种存储方式(后面会详细说)。
- 稀疏图:边的条数很少,满足 E < N log₂N(N 是顶点数)。比如:全国城市交通网(顶点是城市,边是高速公路,城市多但高速公路相对少);
- 稠密图:边的条数很多,接近顶点数的平方(N²)。比如:完全图(任意两个顶点之间都有边),比如一个班级的同学之间,每个人都和其他人是好友,就是稠密图。
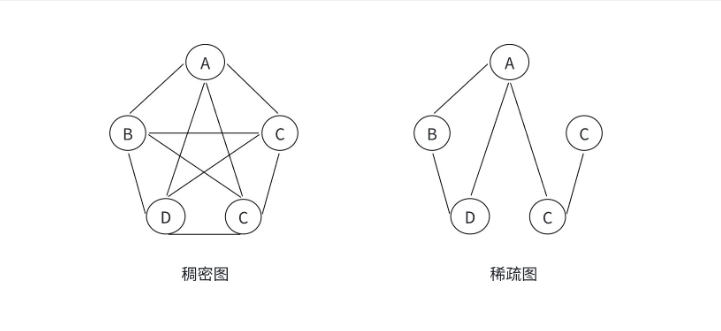
记住这个判断标准:稀疏图用 “邻接表” 存储更高效,稠密图用 “邻接矩阵” 存储更方便。后续我会详细为大家介绍。
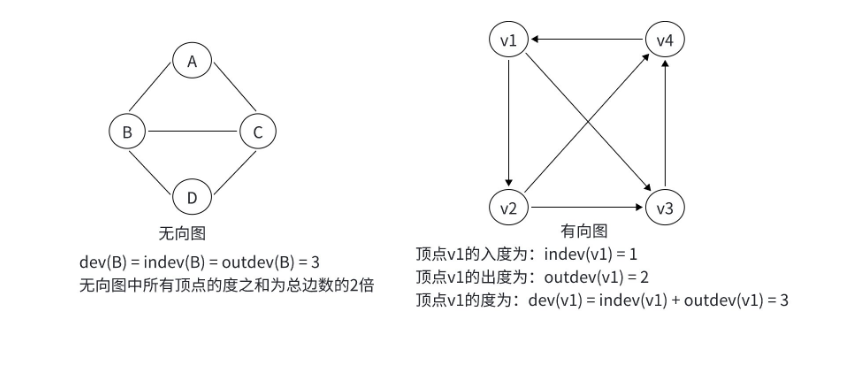
1.5 顶点的度:每个 “人” 有多少 “关系”
顶点的度(Degree)是衡量顶点 “活跃度” 的指标,定义为与该顶点相关联的边的条数,记为 deg (v)。根据图的有向 / 无向,度又分为入度和出度。
无向图中的度:
无向图中,顶点的度 = 入度(indeg)= 出度(outdeg)。因为边没有方向,不存在 “进来” 和 “出去” 的区别。
比如:无向图中,顶点 B 连接了 A、C、D 三条边,那么 deg (B) = indeg (B) = outdeg (B) = 3。
这里有个重要性质:无向图中所有顶点的度之和 = 2 × 边数。因为每条边会给两个顶点各贡献 1 个度,比如边 (u, v) 会让 u 的度 + 1,v 的度 + 1,总度之和增加 2。
有向图中的度:
有向图中,边有方向,因此度分为:
- 入度(indeg (v)):以 v 为终点的有向边的条数(比如有多少人主动加你好友);
- 出度(outdeg (v)):以 v 为起点的有向边的条数(比如你主动加了多少人好友);
- 总度 deg (v) = 入度 + 出度。
比如:有向图中,顶点 v1 有 1 条入边(别人指向它)和 2 条出边(它指向别人),那么 indeg (v1)=1,outdeg (v1)=2,deg (v1)=3。
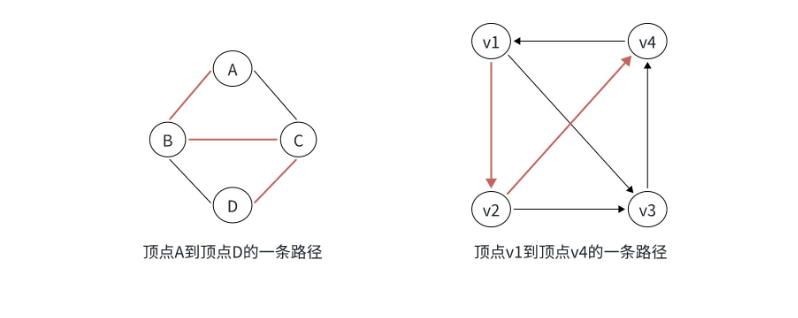
1.6 路径:从 “起点” 到 “终点” 的路线
在图中,路径是从一个顶点到另一个顶点的顶点序列。比如:从宿舍到图书馆,经过 “宿舍→食堂→教学楼→图书馆”,这个序列就是一条路径。
定义:在图 G=(V, E) 中,从顶点 vi 出发,沿若干边经过顶点 vp1, vp2, ..., vpm,到达顶点 vj,那么顶点序列 (vi, vp1, vp2, ..., vpm, vj) 就是从 vi 到 vj 的路径。
关键注意点:两个顶点之间的路径可能不唯一。比如从宿舍到图书馆,还可以走 “宿舍→操场→图书馆”,这就是另一条路径。算法中很多问题(比如最短路),本质就是找两条顶点之间 “最优” 的路径。
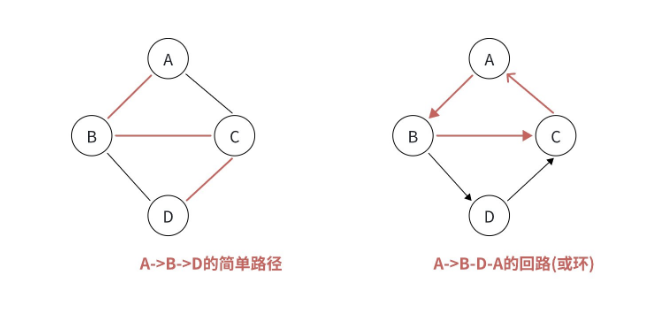
1.7 简单路径与回路:路线是否 “重复”、是否 “闭环”
路径有 “简单” 和 “非简单” 之分,而回路则是一种特殊的路径。
- 简单路径:路径上的所有顶点都不重复(比如 “宿舍→食堂→图书馆”,每个地点只经过一次);
- 非简单路径:路径上有重复顶点(比如 “宿舍→食堂→宿舍→图书馆”,宿舍经过了两次);
- 回路(环):路径的起点和终点相同,且其他顶点不重复(比如 “宿舍→食堂→教学楼→宿舍”,形成一个闭环)。
回路是很多算法问题的关键:比如判断图是否有环(拓扑排序的核心)、找图中的最小环(Floyd 算法的应用)等。
1.8 路径长度和带权路径长度:路线的 “距离” 或 “成本”
路径长度不是指物理距离,而是路径的 “代价”,分为两种情况:
不带权图:
路径长度 = 路径上的边的条数。比如 “宿舍→食堂→图书馆” 有 2 条边,路径长度就是 2。
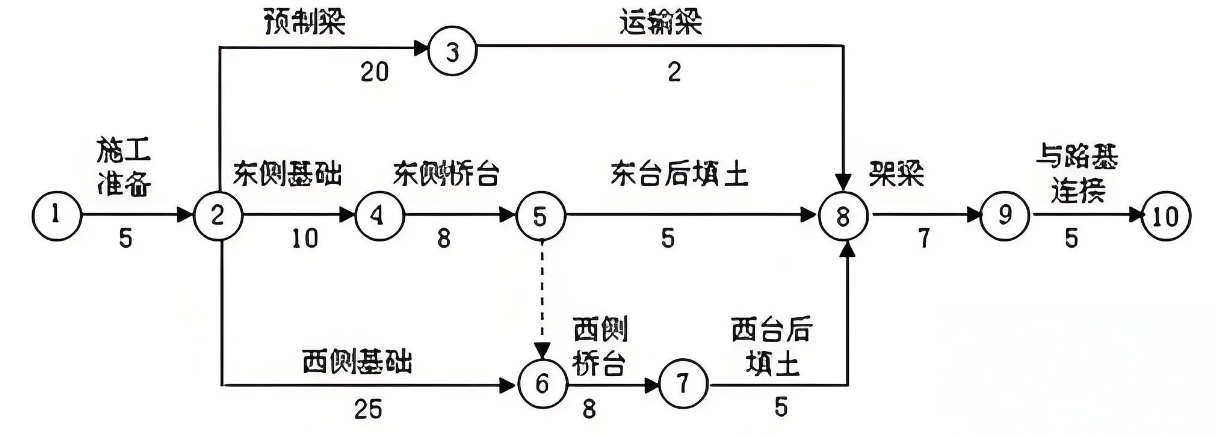
带权图(网络):
有些图的边会附带一个数值(称为 “权值”),用来表示距离、时间、成本等。这种图称为 “网络”(比如交通网中,边的权值是城市间的距离;物流网中,边的权值是运输成本)。
带权路径长度 = 路径上所有边的权值之和。比如:从 A 到 B 的边权值是 5,从 B 到 C 的边权值是 3,那么路径 “A→B→C” 的长度是 5+3=8。
举个例子:下面的工程施工周期图”就是带权图,边的权值是施工天数,路径长度就是完成该路径对应施工步骤所需的总时间。
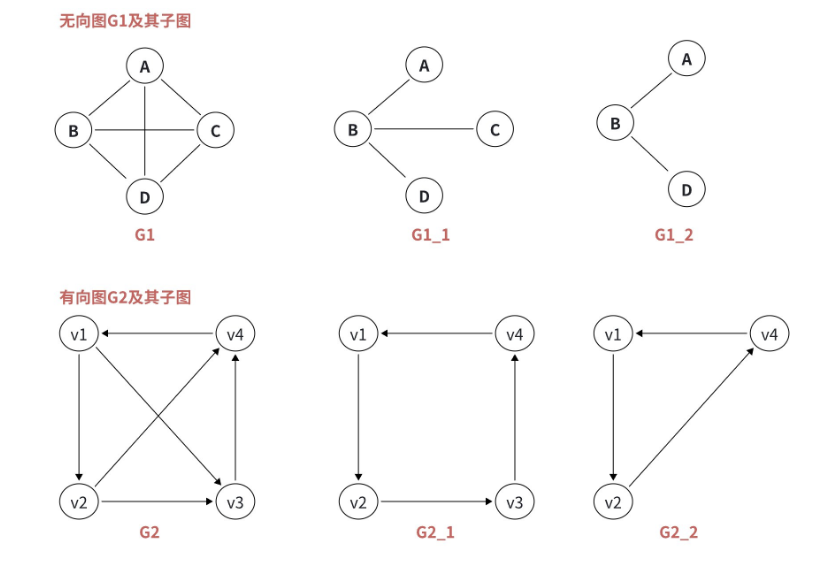
1.9 子图:从 “大网络” 中提取 “小网络”
子图就像从一个庞大的社交网络中,提取出 “大学同学” 这个小圈子 —— 包含原网络的部分顶点和部分边,且这些顶点和边能构成一个合法的图。
定义:设图 G=(V, E) 和图 G'=(V', E'),如果 V' ⊆ V 且 E' ⊆ E,那么 G' 是 G 的子图。
特殊情况:
- 生成子图:V' = V(包含原图所有顶点),但 E' ⊆ E(只包含部分边)。比如:从全国交通网中,只保留高速公路,顶点还是所有城市,这就是生成子图。
简单说:子图可以 “少点少边”,生成子图只能 “少边不能少点”。
1.10 连通图与连通分量:“网络” 是否 “互通”
在无向图中,“连通” 是指两个顶点之间有路径可达;而在有向图中,这一概念更复杂(分为强连通、弱连通),这里先聚焦无向图的连通性。
关键定义:
- 连通:无向图中,若从顶点 v1 到 v2 有路径,则称 v1 和 v2 是连通的;
- 连通图:无向图中,任意两个顶点都是连通的(比如一个班级的同学,任意两个人之间都有好友路径);
- 非连通图:存在至少一对顶点不连通(比如两个独立的班级,班级内互通,但班级间没有好友关系);
- 连通分量:无向图中的 “极大连通子图”(包含尽可能多的顶点和边,且是连通的)。非连通图可以分解为多个连通分量。
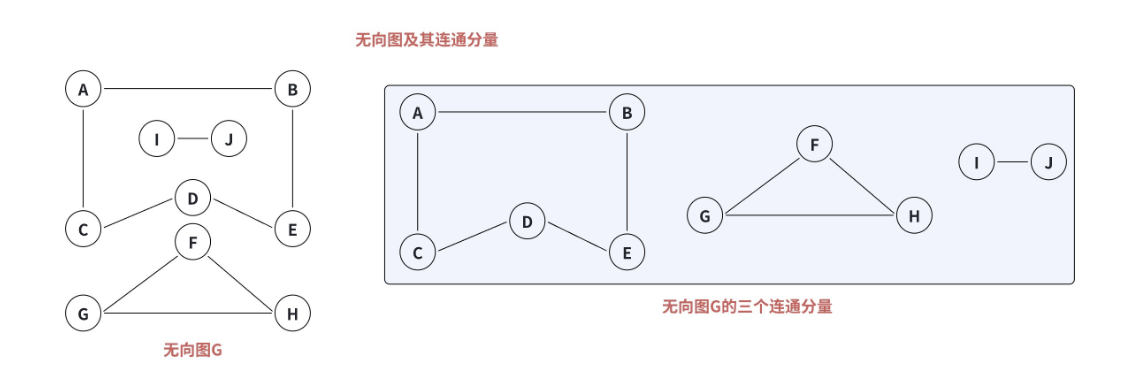
比如:全国交通网中,如果西藏的某个县城没有公路连接其他地区,那么全国交通网就是非连通图,该县城是一个连通分量,其他地区是另一个连通分量。
重要性质:n 个顶点的连通图,边数至少为 n-1(比如树就是边数最少的连通图);如果边数 < n-1,那么图一定是非连通的。
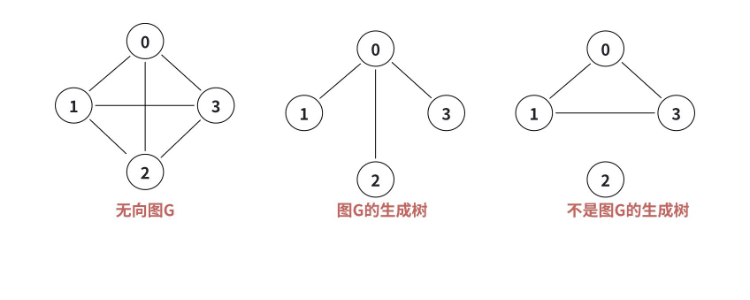
1.11 生成树:连通图的 “最小骨架”
生成树是连通图的核心结构,也是很多算法(比如最小生成树)的基础。
定义:连通图的生成树是包含所有顶点的 “极小连通子图”——“极小” 意味着:
- 边数 = n-1(n 是顶点数);
- 砍去任意一条边,图就变成非连通;
- 增加任意一条边,图就会形成回路。
比如:全国交通网的生成树,就是保留所有城市,且用最少的公路连接所有城市(去掉多余的公路),此时任意两个城市之间只有一条路径,砍去任意一条公路都会导致某个城市孤立。
生成树的特点:
- 连通性:生成树是连通的;
- 无环性:生成树中没有回路;
- 最小性:边数最少(n-1 条)。
一个连通图可以有多个生成树,比如 3 个顶点的完全图(边数 3),生成树有 3 种(每种生成树包含 2 条边)。
二、图的存储:如何用代码 “记录” 图的结构
搞懂了图的基本概念,接下来就是核心问题:如何在计算机中存储图?选择合适的存储方式,直接影响算法的效率。常用的存储方式有三种:邻接矩阵、vector 数组(邻接表的简化版)、链式前向星(邻接表的高效版)。
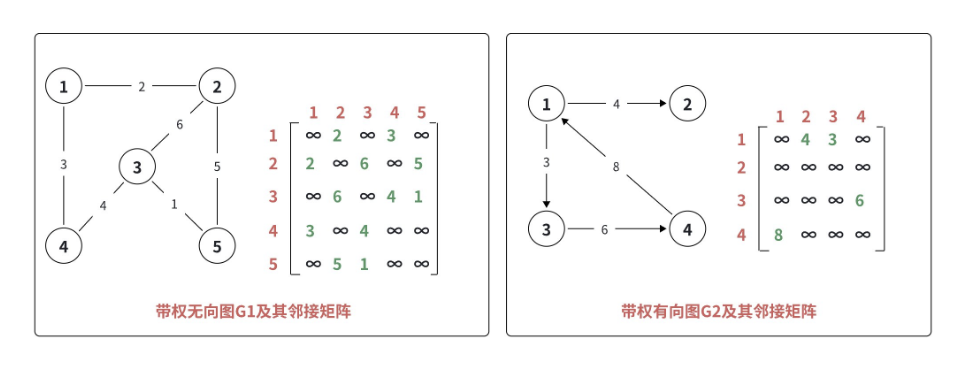
2.1 邻接矩阵:简单直接的 “二维表格”
邻接矩阵是最直观的存储方式,用一个二维数组 edges [N][N] 表示图,其中 edges [i][j] 存储顶点 i 和 j 之间的边的信息。
存储逻辑:
- 不带权图:edges [i][j] = 1 表示有边,edges [i][j] = 0 表示无边;
- 带权图:edges [i][j] = 边的权值(有边),edges [i][j] = ∞(无穷大)表示无边;
- 无向图:edges [i][j] = edges [j][i](因为边是双向的);
- 有向图:edges [i][j] 只表示从 i 到 j 的边(单向)。
代码实现(带权无向图):
#include <iostream>
#include <cstring>
using namespace std;
const int N = 1010; // 顶点数上限
int n, m; // n:顶点数,m:边数
int edges[N][N]; // 邻接矩阵,存储边的权值
int main() {
memset(edges, -1, sizeof edges); // 初始化:-1表示无边
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c; // a和b是顶点,c是边的权值
edges[a][b] = c;
edges[b][a] = c; // 无向图,双向存储
}
return 0;
}优缺点分析:
- 优点:
- 实现简单,直观易懂;
- 查询两个顶点之间是否有边、边的权值,时间复杂度 O (1);
- 适合稠密图(边数多),因为稠密图的邻接矩阵利用率高。
- 缺点:
- 空间复杂度 O (N²),N 较大时(比如 N=1e5)会爆内存(1e10 个元素,根本存不下);
- 遍历一个顶点的所有邻边时,需要遍历整个数组(O (N) 时间),效率低;
- 不适合稀疏图(大部分元素是∞或 0,浪费空间)。
适用场景:
稠密图、顶点数较少(N≤1e3)、需要频繁查询边是否存在的场景。
2.2 vector 数组:灵活高效的 “邻接表”
邻接表是稀疏图的首选存储方式,核心思想是:为每个顶点建立一个链表(或数组),存储该顶点的所有邻边。vector 数组是邻接表的简化实现,用 vector<PII> edges [N] 表示,其中 edges [u] 存储顶点 u 的所有邻边(每个元素是 pair<int, int>,第一个值是邻接顶点 v,第二个值是边的权值 w)。
存储逻辑:
- 每个顶点 u 对应一个 vector,vector 中的元素是 (v, w),表示 u 到 v 有一条权值为 w 的边;
- 无向图:添加边 (u, v, w) 时,需要同时在 edges [u] 中添加 (v, w),在 edges [v] 中添加 (u, w);
- 有向图:只需要在 edges [u] 中添加 (v, w)。
代码实现(带权无向图):
#include <iostream>
#include <vector>
using namespace std;
typedef pair<int, int> PII; // 第一个元素:邻接顶点,第二个元素:边权
const int N = 1e5 + 10; // 顶点数上限(支持1e5个顶点,稀疏图无压力)
int n, m;
vector<PII> edges[N]; // 邻接表:edges[u]存储u的所有邻边
int main() {
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c;
edges[a].push_back({b, c}); // a→b,权值c
edges[b].push_back({a, c}); // 无向图,添加反向边
}
return 0;
}优缺点分析:
- 优点:
- 空间复杂度 O (N + M),只存储实际存在的边,适合稀疏图(M 远小于 N²);
- 遍历一个顶点的所有邻边时,直接遍历对应的 vector,时间复杂度 O (度 (u)),效率高;
- 支持顶点数多的场景(比如 N=1e5),不会爆内存。
- 缺点:
- 查询两个顶点之间是否有边,需要遍历其中一个顶点的 vector,时间复杂度 O (度 (u)),比邻接矩阵慢;
- 实现比邻接矩阵稍复杂(需要用 pair 或结构体)。
适用场景:
稀疏图、顶点数多(N≤1e5)、需要频繁遍历邻边的场景(比如 DFS、BFS、最短路算法)。
2.3 链式前向星:极致高效的 “邻接表”
链式前向星是邻接表的另一种实现方式,基于数组模拟链表,比 vector 数组更节省内存、访问速度更快,是算法竞赛中的 “常客”,尤其适合处理大规模稀疏图。
核心结构:
需要四个数组:
- h [N]:头指针数组,h [u] 存储顶点 u 的第一条边的索引;
- e [M]:边数组,e [id] 存储第 id 条边的终点 v;
- ne [M]:next 指针数组,ne [id] 存储第 id 条边的下一条边的索引;
- w [M]:权值数组,w [id] 存储第 id 条边的权值。
存储逻辑:
- 每条边用一个索引 id 标识,通过 ne [id] 串联起同一个顶点的所有边;
- 添加边时,采用 “头插法”:将新边插入到顶点 u 的边链表的头部(更新 h [u] 为新边的 id);
- 无向图需要添加两条方向相反的边。
代码实现(带权无向图):
#include <iostream>
using namespace std;
const int N = 1e5 + 10; // 顶点数上限
const int M = 2e5 + 10; // 边数上限(无向图每条边存两次,所以M要翻倍)
int h[N], e[M], ne[M], w[M], id; // 链式前向星核心数组
int n, m;
// 添加一条边:a→b,权值c
void add(int a, int b, int c) {
id++; // 边的唯一索引
e[id] = b; // 边的终点
w[id] = c; // 边的权值
ne[id] = h[a]; // 新边的下一条边是a原来的第一条边
h[a] = id; // a的第一条边更新为当前新边
}
int main() {
cin >> n >> m;
memset(h, 0, sizeof h); // 初始化头指针数组为0(0表示无后续边)
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c;
add(a, b, c); // 添加a→b的边
add(b, a, c); // 无向图,添加b→a的边
}
return 0;
}优缺点分析:
- 优点:
- 空间复杂度 O (N + M),比 vector 数组更节省内存(vector 有额外的容器开销);
- 访问速度极快(数组访问比 vector 的迭代器快);
- 适合大规模稀疏图(比如 N=1e5,M=2e5),是算法竞赛的首选存储方式。
- 缺点:
- 实现比 vector 数组复杂,需要理解链表的头插法;
- 不支持随机访问边,只能按顺序遍历。
适用场景:
算法竞赛、大规模稀疏图、对时间和内存要求极高的场景。
三种存储方式对比总结
存储方式 | 空间复杂度 | 查询边是否存在 | 遍历邻边效率 | 适用场景 |
|---|---|---|---|---|
邻接矩阵 | O(N²) | O(1) | O(N) | 稠密图、N 较小(≤1e3) |
vector 数组(邻接表) | O(N+M) | O (度 (u)) | O (度 (u)) | 稀疏图、N 较大(≤1e5)、日常开发 |
链式前向星 | O(N+M) | O (度 (u)) | O (度 (u)) | 稀疏图、大规模数据、算法竞赛 |
日常开发中,vector 数组是性价比最高的选择(兼顾简洁性和效率);算法竞赛中,链式前向星更适合处理超大规模数据;稠密图直接用邻接矩阵。
三、图的遍历:如何 “走遍” 图中的所有顶点
图的遍历是指从某个顶点出发,按照一定规则访问图中所有顶点,且每个顶点只访问一次。这是图论算法的基础(比如最短路、拓扑排序、连通分量查询都依赖遍历)。常用的遍历算法有两种:DFS(深度优先搜索)和 BFS(广度优先搜索)。
3.1 DFS:深度优先搜索 ——“一条路走到黑”
DFS 的核心思想是:从起点出发,沿着一条路径一直走到底,直到无法继续前进,然后回溯到上一个顶点,选择另一条未探索的路径,重复这个过程,直到所有顶点都被访问。
可以用一个生活例子理解:你走进一个迷宫,每次选择一条未走过的岔路一直走,走到死胡同就退回来,换另一条岔路,直到走出迷宫(访问所有房间)。
关键要点:
- 需要一个布尔数组 st [N] 标记顶点是否已被访问(避免重复访问);
- 递归实现(简洁)或栈实现(非递归,适合大规模数据,避免栈溢出);
- 遍历顺序:深度优先,可能先访问远的顶点,再回溯访问近的顶点。
代码实现(三种存储方式):
1. 邻接矩阵存储的 DFS
#include <iostream>
#include <cstring>
using namespace std;
const int N = 1010;
int n, m;
int edges[N][N]; // 邻接矩阵
bool st[N]; // 标记是否访问过
// 从顶点u开始DFS
void dfs(int u) {
cout << u << " "; // 访问顶点u
st[u] = true; // 标记为已访问
// 遍历所有顶点,找u的邻边
for (int v = 1; v <= n; v++) {
// 如果u和v之间有边,且v未被访问
if (edges[u][v] != -1 && !st[v]) {
dfs(v); // 递归访问v
}
}
}
int main() {
memset(edges, -1, sizeof edges);
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c;
edges[a][b] = c;
edges[b][a] = c;
}
// 假设从顶点1开始遍历(如果图非连通,需要遍历所有未访问的顶点)
for (int i = 1; i <= n; i++) {
if (!st[i]) {
dfs(i);
}
}
return 0;
}2. vector 数组(邻接表)存储的 DFS
#include <iostream>
#include <vector>
using namespace std;
typedef pair<int, int> PII;
const int N = 1e5 + 10;
int n, m;
vector<PII> edges[N]; // 邻接表
bool st[N]; // 标记是否访问过
void dfs(int u) {
cout << u << " ";
st[u] = true;
// 遍历u的所有邻边
for (auto& t : edges[u]) {
int v = t.first; // 邻接顶点
// int w = t.second; // 边权(遍历不需要时可忽略)
if (!st[v]) {
dfs(v);
}
}
}
int main() {
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c;
edges[a].push_back({b, c});
edges[b].push_back({a, c});
}
// 处理非连通图
for (int i = 1; i <= n; i++) {
if (!st[i]) {
dfs(i);
}
}
return 0;
}3. 链式前向星存储的 DFS
#include <iostream>
using namespace std;
const int N = 1e5 + 10;
const int M = 2e5 + 10;
int h[N], e[M], ne[M], w[M], id;
int n, m;
bool st[N];
void add(int a, int b, int c) {
id++;
e[id] = b;
w[id] = c;
ne[id] = h[a];
h[a] = id;
}
void dfs(int u) {
cout << u << " ";
st[u] = true;
// 遍历u的所有邻边(链式前向星遍历方式)
for (int i = h[u]; i; i = ne[i]) {
int v = e[i]; // 邻接顶点
// int w = ::w[i]; // 边权(遍历不需要时可忽略)
if (!st[v]) {
dfs(v);
}
}
}
int main() {
memset(h, 0, sizeof h);
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c;
add(a, b, c);
add(b, a, c);
}
// 处理非连通图
for (int i = 1; i <= n; i++) {
if (!st[i]) {
dfs(i);
}
}
return 0;
}DFS 的应用场景:
- 连通分量查询(判断图是否连通、找所有连通分量);
- 路径搜索(比如迷宫问题、单词接龙);
- 拓扑排序(递归实现);
- 生成树构建。
注意事项:
- 递归实现的 DFS 在顶点数较多时(比如 N=1e4)会导致栈溢出,此时需要用非递归实现(用栈模拟递归过程);
- 非连通图需要遍历所有未访问的顶点,确保所有顶点都被访问。
3.2 BFS:广度优先搜索 ——“一层一层剥开”
BFS 的核心思想是:从起点出发,先访问起点的所有邻接顶点(第一层),再依次访问每个邻接顶点的邻接顶点(第二层),以此类推,直到所有顶点都被访问。
生活例子:你站在一个广场中央,先和身边的人打招呼(第一层),再和身边人的朋友打招呼(第二层),直到所有在场的人都打过招呼。
关键要点:
- 需要一个队列(queue)存储待访问的顶点;
- 需要一个布尔数组 st [N] 标记顶点是否已被访问;
- 遍历顺序:广度优先,先访问近的顶点,再访问远的顶点(适合找最短路径,比如无权图的最短路)。
代码实现(三种存储方式):
1. 邻接矩阵存储的 BFS
#include <iostream>
#include <cstring>
#include <queue>
using namespace std;
const int N = 1010;
int n, m;
int edges[N][N];
bool st[N];
void bfs(int u) {
queue<int> q;
q.push(u); // 起点入队
st[u] = true; // 标记为已访问
while (!q.empty()) {
int a = q.front(); // 取出队头顶点
q.pop();
cout << a << " "; // 访问顶点
// 遍历所有顶点,找a的邻边
for (int v = 1; v <= n; v++) {
if (edges[a][v] != -1 && !st[v]) {
q.push(v); // 邻接顶点入队
st[v] = true; // 标记为已访问(避免重复入队)
}
}
}
}
int main() {
memset(edges, -1, sizeof edges);
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c;
edges[a][b] = c;
edges[b][a] = c;
}
// 处理非连通图
for (int i = 1; i <= n; i++) {
if (!st[i]) {
bfs(i);
}
}
return 0;
}2. vector 数组(邻接表)存储的 BFS
#include <iostream>
#include <vector>
#include <queue>
using namespace std;
typedef pair<int, int> PII;
const int N = 1e5 + 10;
int n, m;
vector<PII> edges[N];
bool st[N];
void bfs(int u) {
queue<int> q;
q.push(u);
st[u] = true;
while (!q.empty()) {
int a = q.front();
q.pop();
cout << a << " ";
// 遍历a的所有邻边
for (auto& t : edges[a]) {
int v = t.first;
if (!st[v]) {
q.push(v);
st[v] = true;
}
}
}
}
int main() {
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c;
edges[a].push_back({b, c});
edges[b].push_back({a, c});
}
// 处理非连通图
for (int i = 1; i <= n; i++) {
if (!st[i]) {
bfs(i);
}
}
return 0;
}3. 链式前向星存储的 BFS
#include <iostream>
#include <queue>
using namespace std;
const int N = 1e5 + 10;
const int M = 2e5 + 10;
int h[N], e[M], ne[M], w[M], id;
int n, m;
bool st[N];
void add(int a, int b, int c) {
id++;
e[id] = b;
w[id] = c;
ne[id] = h[a];
h[a] = id;
}
void bfs(int u) {
queue<int> q;
q.push(u);
st[u] = true;
while (!q.empty()) {
int a = q.front();
q.pop();
cout << a << " ";
// 遍历a的所有邻边
for (int i = h[a]; i; i = ne[i]) {
int v = e[i];
if (!st[v]) {
q.push(v);
st[v] = true;
}
}
}
}
int main() {
memset(h, 0, sizeof h);
cin >> n >> m;
for (int i = 1; i <= m; i++) {
int a, b, c;
cin >> a >> b >> c;
add(a, b, c);
add(b, a, c);
}
// 处理非连通图
for (int i = 1; i <= n; i++) {
if (!st[i]) {
bfs(i);
}
}
return 0;
}BFS 的应用场景:
- 无权图的最短路径(比如找两个顶点之间的最短边数);
- 层序遍历(比如树的层序遍历,本质是 BFS);
- 连通分量查询;
- 拓扑排序(队列实现)。
注意事项:
- 顶点入队时必须立即标记为已访问(st [v] = true),否则可能会被多次入队,导致队列溢出和时间复杂度升高;
- 非连通图需要遍历所有未访问的顶点,确保所有顶点都被访问。
DFS 与 BFS 对比总结
遍历方式实现方式遍历顺序空间复杂度适用场景DFS递归 / 栈深度优先(一条路走到黑)O(N)连通分量、路径搜索、拓扑排序BFS队列广度优先(一层一层)O(N)无权图最短路、层序遍历 | 遍历方式 | 实现方式 | 遍历顺序 | 空间复杂度 | 适用场景 | DFS | 递归 / 栈 | 深度优先(一条路走到黑) | O(N) | 连通分量、路径搜索、拓扑排序 | BFS | 队列 | 广度优先(一层一层) | O(N) | 无权图最短路、层序遍历 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
遍历方式 | 实现方式 | 遍历顺序 | 空间复杂度 | 适用场景 | |||||||||||
DFS | 递归 / 栈 | 深度优先(一条路走到黑) | O(N) | 连通分量、路径搜索、拓扑排序 | |||||||||||
BFS | 队列 | 广度优先(一层一层) | O(N) | 无权图最短路、层序遍历 |
总结
图论的世界远比我们想象的精彩,掌握了基础的概念、存储和遍历,你就已经打开了算法大门的一半。接下来,就带着这些知识去刷题实战吧 —— 只有亲手敲代码、解决实际问题,才能真正将知识内化为能力! 如果这篇文章对你有帮助,别忘了点赞、收藏、转发三连~ 后续还会更新最短路、最小生成树、拓扑排序等进阶内容,关注我,一起玩转图论!
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2026-01-13,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号