算法基础篇:(五)基础算法之差分——以“空间”换“时间”

前言
在算法学习中,“高效处理区间操作” 是贯穿始终的核心需求之一。当面对 “多次修改数组 / 矩阵的某个区间,最后查询结果” 这类问题时,暴力遍历修改的 O (n) 时间复杂度往往无法满足大数据规模的要求。而差分算法作为 “空间换时间” 思想的经典体现,能将区间修改操作优化到 O (1),再结合前缀和完成最终查询,成为解决此类问题的 “利器”。 本文将从差分的基本概念入手,系统讲解一维差分、二维差分的原理、实现步骤、边界处理技巧,并结合洛谷、牛客网等平台的经典例题,手把手教你用 C++ 实现差分算法。下面就让我们正式开始吧!
一、差分算法核心思想:为什么需要差分?
在编程中,我们经常遇到这样的场景:
- 给长度为 1e5 的数组,执行 1e5 次操作,每次将区间 [l, r] 的元素加 k,最后输出数组;
- 给 1e3×1e3 的矩阵,执行 1e5 次操作,每次将子矩阵 [x1,y1,x2,y2] 的元素加 k,最后输出矩阵。
如果用暴力方法实现 —— 每次操作遍历区间内所有元素修改,总时间复杂度会达到 O (q×n)(数组)或 O (q×n×m)(矩阵)。当 q=1e5、n=1e5 时,O (1e10) 的时间复杂度会直接超时,完全无法通过测试。
差分算法的核心思路是间接修改、集中计算:
- 构建差分数组 / 矩阵:通过差分数组记录 “区间修改的变化量”,而非直接修改原始数据;
- 快速处理区间修改:每次区间修改仅需在差分数组的两个位置操作(O (1) 时间);
- 还原原始数据:所有修改完成后,通过 “前缀和” 操作将差分数组还原为最终的原始数据(O (n) 或 O (n×m) 时间)。
这种方式将多次区间修改的时间复杂度从 O (q×n) 降至 O (q + n),极大提升了效率,是处理大规模区间操作的首选算法。
二、一维差分:数组区间修改的 “特效药”
一维差分是差分算法的基础形式,适用于一维数组的区间修改与最终查询场景。
2.1 基本原理
2.1.1 差分数组的定义
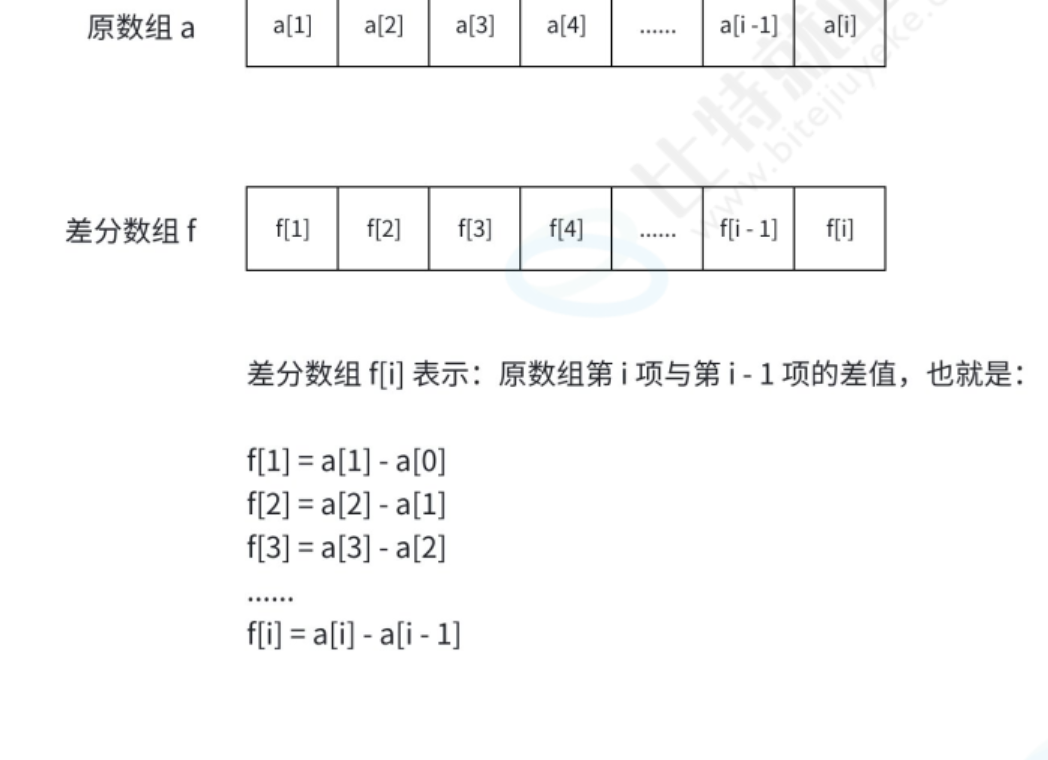
对于一维数组a[1...n](本文统一使用 1-based 下标,避免边界处理麻烦),其差分数组d[1...n+1](注意:差分数组长度比原数组多 1,用于处理 r=n 的边界)的定义为:
d[1] = a[1]d[i] = a[i] - a[i-1](对于 2 ≤ i ≤ n)d[n+1] = 0(边界初始化,避免越界)
简单来说,差分数组的每个元素d[i]记录了原数组a[i]与a[i-1]的差值。
2.1.2 区间修改的核心技巧
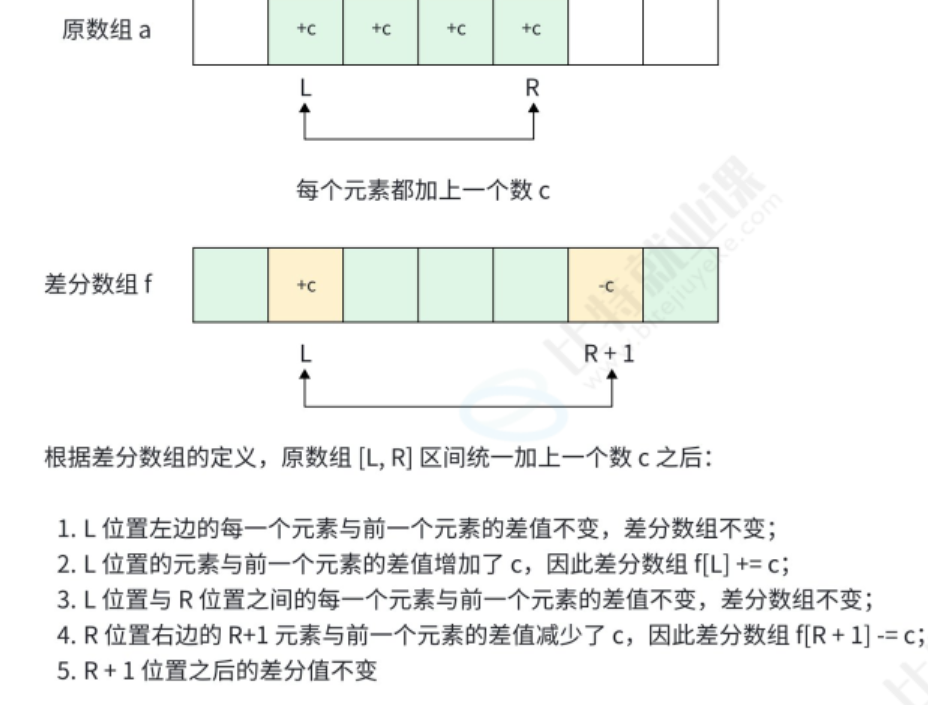
假设我们需要将原数组a的区间[l, r]内所有元素加k,如何通过差分数组d实现?
根据差分数组的定义,原数组a是差分数组d的前缀和(即a[i] = d[1] + d[2] + ... + d[i])。因此:
- 要让
a[l]到a[r]都加k,只需让差分数组d[l] += k(从l开始,后续前缀和都会增加k); - 为了避免
a[r+1]及以后的元素也被加k,需要让d[r+1] -= k(从r+1开始,抵消前面增加的k)。
这两步操作仅需修改差分数组的两个位置,时间复杂度为O(1),与区间长度无关。
2.1.3 从差分数组还原原数组
所有区间修改完成后,通过 “对差分数组求前缀和” 即可还原出最终的原数组:a[i] = a[i-1] + d[i](其中a[0] = 0)
推导过程:
- 差分数组
d[i]记录了a[i]与a[i-1]的差值; - 累加
d[1]到d[i],正好得到a[i]的最终值。
2.1.4 边界处理关键点
- 差分数组长度设为
n+1:当r = n时,r+1 = n+1,不会超出差分数组范围; - 初始差分数组构建:若原数组初始非空,需先通过原数组构建初始差分数组(而非直接初始化为 0)。
2.2 一维差分实现步骤
步骤 1:输入原始数组与操作参数
读取数组长度n、操作次数m,然后读取原始数组a[1...n]。
步骤 2:构建初始差分数组
根据差分数组的定义,初始化d[1...n+1]:
d[1] = a[1]- 对于
2 ≤ i ≤ n:d[i] = a[i] - a[i-1] d[n+1] = 0
步骤 3:处理所有区间修改操作
对于每次操作(l, r, k):
d[l] += kd[r+1] -= k(若r = n,r+1 = n+1,仍在差分数组范围内)
步骤 4:还原最终数组并输出
通过前缀和操作,从差分数组d还原出最终的a数组:
a[0] = 0- 对于
1 ≤ i ≤ n:a[i] = a[i-1] + d[i] - 输出最终的
a数组。
2.3 一维差分代码模板(C++)
#include <iostream>
using namespace std;
typedef long long LL; // 防止数据溢出,必须使用long long
const int N = 1e5 + 10; // 适配1e5规模的数组
int n, m;
LL a[N]; // 原始数组
LL d[N + 2];// 差分数组(长度n+2,处理r=n的边界)
int main() {
// 加速输入输出(大数据场景必备)
ios::sync_with_stdio(false);
cin.tie(nullptr);
// 步骤1:输入原始数组
cin >> n >> m;
for (int i = 1; i <= n; ++i) {
cin >> a[i];
}
// 步骤2:构建初始差分数组
d[1] = a[1];
for (int i = 2; i <= n; ++i) {
d[i] = a[i] - a[i - 1];
}
d[n + 1] = 0; // 边界初始化
// 步骤3:处理m次区间修改
while (m--) {
int l, r;
LL k;
cin >> l >> r >> k;
d[l] += k;
d[r + 1] -= k;
}
// 步骤4:还原最终数组并输出
LL current = 0; // 记录当前前缀和
for (int i = 1; i <= n; ++i) {
current += d[i];
cout << current << " ";
}
cout << endl;
return 0;
}2.4 一维差分常见问题与解决方案
问题 1:数据溢出
- 现象:当数组元素较大或修改次数较多时,
d[i]或current(前缀和)超出int范围; - 解决方案:差分数组、原始数组、临时变量(如
current)均使用long long类型,int最大值约 2e9,无法满足 1e5 次修改(每次加 1e9)的需求。
问题 2:边界越界
- 现象:当
r = n时,d[r+1] = d[n+1],若差分数组长度为n,会导致越界; - 解决方案:差分数组长度设为
n+2(或至少n+1),确保r+1不会超出范围。
问题 3:初始差分数组构建错误
- 现象:直接将差分数组初始化为 0,未根据原始数组构建初始差值;
- 解决方案:严格按照
d[1] = a[1]、d[i] = a[i] - a[i-1]的公式构建,若原始数组初始为 0,则可直接初始化差分数组为 0。
2.5 一维差分经典例题:海底高铁(洛谷 P3406)
题目来源:洛谷 P3406 海底高铁
题目描述
某高铁经过N个城市,相邻城市间的铁路段有两种购票方式:
- 纸质票:每次乘坐第
i段铁路需花费A_i元; - IC 卡:购买 IC 卡需
C_i元工本费,每次乘坐扣B_i元(B_i < A_i)。
现在有M个城市的访问序列P_1, P_2, ..., P_M,乘客从P_1出发,依次前往P_2, ..., P_M,求最少总花费(包含购票、买卡费用)。
输入描述
- 第一行:两个整数
N(城市数)、M(访问城市数); - 第二行:
M个整数,代表访问序列P_1 ~ P_M; - 接下来
N-1行:每行三个整数A_i, B_i, C_i(第i段铁路的纸质票价格、IC 卡单次价格、IC 卡工本费)。
输出描述
一个整数,代表最少总花费。
示例输入
9 10
3 1 4 1 5 9 2 6 5 3
200 100 50
300 299 100
500 200 500
345 234 123
100 50 100
600 100 1
450 400 80
2 1 10示例输出
6394题目链接:https://www.luogu.com.cn/problem/P3406
解法思路
- 问题转化:首先需要计算每段铁路的乘坐次数
cnt[i](第i段铁路连接城市i和i+1); - 差分求乘坐次数:访问序列中,从
P_i到P_{i+1}会经过min(P_i,P_{i+1})到max(P_i,P_{i+1})-1的所有铁路段,因此对差分数组d执行d[l] += 1、d[r+1] -= 1(l = min(P_i,P_{i+1}),r = max(P_i,P_{i+1})-1),最后通过前缀和得到cnt[i]; - 计算最小花费:对每段铁路,比较 “纸质票总花费(
A_i * cnt[i])” 和 “IC 卡总花费(C_i + B_i * cnt[i])”,取较小值累加。
代码实现
#include <iostream>
#include <algorithm> // 用于min、max函数
using namespace std;
typedef long long LL;
const int N = 1e5 + 10; // N<=1e5,适配题目规模
int n, m;
LL d[N]; // 差分数组,计算每段铁路的乘坐次数
LL cnt[N];// 每段铁路的乘坐次数
int main() {
ios::sync_with_stdio(false);
cin.tie(nullptr);
// 步骤1:输入城市数、访问次数和访问序列
cin >> n >> m;
int prev; // 上一个访问的城市
cin >> prev;
for (int i = 2; i <= m; ++i) {
int curr;
cin >> curr;
// 计算当前行程经过的铁路段范围[l, r]
int l = min(prev, curr);
int r = max(prev, curr) - 1;
// 差分更新:乘坐次数+1
d[l] += 1;
d[r + 1] -= 1;
prev = curr;
}
// 步骤2:通过前缀和得到每段铁路的乘坐次数cnt
LL current = 0;
for (int i = 1; i <= n - 1; ++i) {
current += d[i];
cnt[i] = current;
}
// 步骤3:计算最小总花费
LL total = 0;
for (int i = 1; i <= n - 1; ++i) {
LL A, B, C;
cin >> A >> B >> C;
// 比较纸质票和IC卡的花费,取最小值
LL cost_ticket = A * cnt[i];
LL cost_ic = C + B * cnt[i];
total += min(cost_ticket, cost_ic);
}
cout << total << endl;
return 0;
}算法分析
- 时间复杂度:O (N + M),处理访问序列 O (M),计算乘坐次数 O (N),计算花费 O (N),完全满足 N、M<=1e5 的规模;
- 空间复杂度:O (N),存储差分数组和乘坐次数数组;
- 核心亮点:用差分快速计算多段区间的 “次数累加”,避免暴力遍历每段行程的铁路段,效率提升显著。
三、二维差分:矩阵区间修改的 “高效工具”
一维差分适用于数组,而二维差分是其在矩阵中的扩展,用于快速处理 “多次修改子矩阵、最后查询矩阵” 的问题。
3.1 基本原理
3.1.1 二维差分数组的定义
对于n行m列的矩阵a[1...n][1...m],其二维差分数组d[1...n+1][1...m+1](边界多 1 行 1 列)的定义为:d[i][j] = a[i][j] - a[i-1][j] - a[i][j-1] + a[i-1][j-1]
推导思路:类比一维差分 “记录相邻元素差值”,二维差分记录 “当前位置与上方、左方、左上位置的差值关系”,确保对d求前缀和后能还原出a。
3.1.2 子矩阵修改的核心技巧
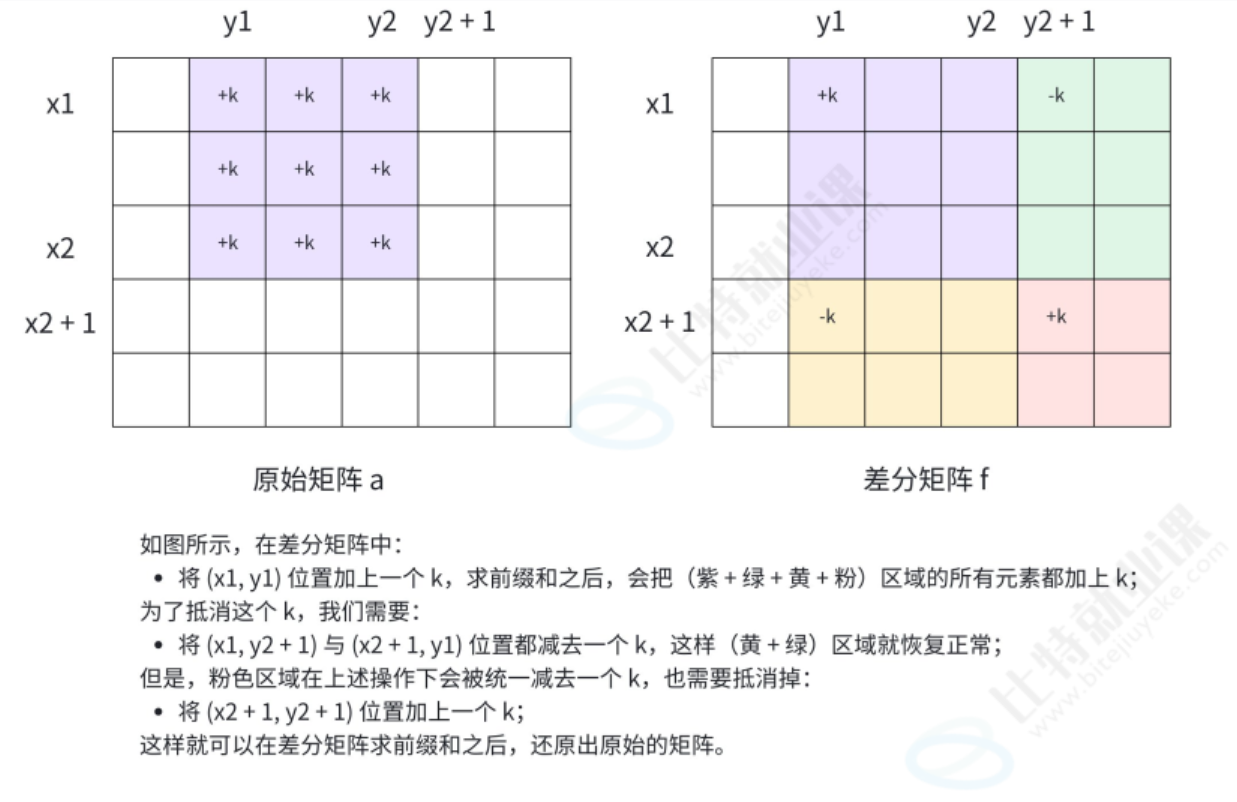
假设需要将矩阵a中以(x1,y1)为左上角、(x2,y2)为右下角的子矩阵内所有元素加k,如何通过二维差分数组d实现?
根据二维前缀和的性质(a是d的二维前缀和),我们需要让子矩阵内的所有元素在求前缀和时都增加k,同时不影响子矩阵外的元素。具体操作如下:
d[x1][y1] += k:从(x1,y1)开始,后续二维前缀和都会增加k;d[x1][y2+1] -= k:抵消y2+1列及以后的增加量,避免右方区域受影响;d[x2+1][y1] -= k:抵消x2+1行及以后的增加量,避免下方区域受影响;d[x2+1][y2+1] += k:(x2+1,y2+1)位置被前两步抵消了两次,需加回一次k,恢复平衡。
这四步操作仅需修改差分数组的 4 个位置,时间复杂度为O(1),与子矩阵的大小无关。
3.1.3 从二维差分数组还原原矩阵
所有子矩阵修改完成后,通过 “对二维差分数组求两次前缀和”(先每行求前缀和,再每列求前缀和,或反之)还原出最终的原矩阵:
- 行前缀和:对每一行
i,d[i][j] += d[i][j-1](j从 2 到m); - 列前缀和:对每一列
j,d[i][j] += d[i-1][j](i从 2 到n); - 最终
d[i][j]即为原矩阵a[i][j]的最终值。
3.1.4 边界处理关键点
- 二维差分数组大小设为
(n+2)×(m+2):确保x2+1 ≤ n+1、y2+1 ≤ m+1,避免越界; - 初始差分数组构建:若原矩阵初始非空,需根据原矩阵计算初始差分,而非直接初始化为 0。
3.2 二维差分实现步骤
步骤 1:输入原始矩阵与操作参数
读取矩阵的行数n、列数m、操作次数q,然后读取n行m列的原始矩阵a。
步骤 2:构建初始二维差分数组
初始化d[(n+2)×(m+2)]为 0,根据原始矩阵a计算初始差分:对于每个i(1≤i≤n)和j(1≤j≤m):d[i][j] = a[i][j] - a[i-1][j] - a[i][j-1] + a[i-1][j-1](注:a[0][j]和a[i][0]均视为 0)
步骤 3:处理所有子矩阵修改操作
对于每次操作(x1,y1,x2,y2,k):
d[x1][y1] += kd[x1][y2+1] -= kd[x2+1][y1] -= kd[x2+1][y2+1] += k
步骤 4:还原最终矩阵并输出
- 对差分数组
d求行前缀和:对于每一行i(1≤i≤n),从j=2到m:d[i][j] += d[i][j-1] - 对差分数组
d求列前缀和:对于每一列j(1≤j≤m),从i=2到n:d[i][j] += d[i-1][j] - 输出
d[1...n][1...m](即最终的原矩阵)。
3.3 二维差分代码模板(C++)
#include <iostream>
using namespace std;
typedef long long LL;
const int N = 1010; // 适配1e3×1e3的矩阵(n,m<=1e3)
int n, m, q;
LL a[N][N]; // 原始矩阵
LL d[N + 2][N + 2];// 二维差分数组((n+2)×(m+2))
// 子矩阵修改:给(x1,y1)到(x2,y2)的子矩阵加k
void insert(int x1, int y1, int x2, int y2, LL k) {
d[x1][y1] += k;
d[x1][y2 + 1] -= k;
d[x2 + 1][y1] -= k;
d[x2 + 1][y2 + 1] += k;
}
int main() {
ios::sync_with_stdio(false);
cin.tie(nullptr);
// 步骤1:输入原始矩阵
cin >> n >> m >> q;
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= m; ++j) {
cin >> a[i][j];
}
}
// 步骤2:构建初始二维差分数组
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= m; ++j) {
insert(i, j, i, j, a[i][j]); // 单个元素修改等价于子矩阵(i,j,i,j)加a[i][j]
}
}
// 步骤3:处理q次子矩阵修改
while (q--) {
int x1, y1, x2, y2;
LL k;
cin >> x1 >> y1 >> x2 >> y2 >> k;
insert(x1, y1, x2, y2, k);
}
// 步骤4:还原最终矩阵(行前缀和 + 列前缀和)
// 行前缀和
for (int i = 1; i <= n; ++i) {
for (int j = 2; j <= m; ++j) {
d[i][j] += d[i][j - 1];
}
}
// 列前缀和
for (int j = 1; j <= m; ++j) {
for (int i = 2; i <= n; ++i) {
d[i][j] += d[i - 1][j];
}
}
// 输出最终矩阵
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= m; ++j) {
cout << d[i][j] << " ";
}
cout << endl;
}
return 0;
}3.4 二维差分关键优化:初始差分的简化构建
在步骤 2 中,构建初始差分数组时,我们可以利用insert函数的 “单个元素修改” 功能(子矩阵左上角和右下角均为(i,j)),直接将a[i][j]作为k传入insert(i,j,i,j,a[i][j]),避免手动计算d[i][j] = a[i][j] - a[i-1][j] - a[i][j-1] + a[i-1][j-1]的复杂公式,减少代码出错概率。
这种方式的原理是:初始时差分数组d全为 0,对每个(i,j)执行 “子矩阵(i,j,i,j)加a[i][j]”,等价于构建了初始的差分数组,与手动计算结果完全一致。
3.5 二维差分经典例题:地毯(洛谷 P3397)
题目来源:洛谷 P3397 地毯
题目描述
在n×n的格子上有m个地毯,每个地毯覆盖以(x1,y1)为左上角、(x2,y2)为右下角的子矩阵。求每个格子被多少个地毯覆盖。
输入描述
- 第一行:两个整数
n(格子大小)、m(地毯数); - 接下来
m行:每行四个整数x1,y1,x2,y2(地毯的左上角和右下角坐标)。
输出描述
n行,每行n个整数,第i行第j列的整数表示(i,j)格子被覆盖的次数。
示例输入
5 3
2 2 3 3
3 3 5 5
1 2 1 4示例输出
0 1 1 1 0
0 1 1 0 0
0 1 2 1 1
0 0 1 1 1
0 0 1 1 1题目链接:https://www.luogu.com.cn/problem/P3397
解法思路
- 问题转化:每个地毯覆盖子矩阵
(x1,y1,x2,y2),等价于 “将该子矩阵的每个元素加 1”,最终查询每个元素的值; - 二维差分实现:使用二维差分数组
d,每次地毯覆盖操作对应insert(x1,y1,x2,y2,1); - 还原矩阵:所有地毯操作完成后,对
d求行前缀和与列前缀和,得到每个格子的覆盖次数。
代码实现
#include <iostream>
using namespace std;
const int N = 1010; // n<=1e3,适配题目规模
int n, m;
int d[N + 2][N + 2];// 二维差分数组
// 子矩阵加1操作
void insert(int x1, int y1, int x2, int y2) {
d[x1][y1] += 1;
d[x1][y2 + 1] -= 1;
d[x2 + 1][y1] -= 1;
d[x2 + 1][y2 + 1] += 1;
}
int main() {
ios::sync_with_stdio(false);
cin.tie(nullptr);
cin >> n >> m;
for (int i = 0; i < m; ++i) {
int x1, y1, x2, y2;
cin >> x1 >> y1 >> x2 >> y2;
insert(x1, y1, x2, y2);
}
// 行前缀和
for (int i = 1; i <= n; ++i) {
for (int j = 2; j <= n; ++j) {
d[i][j] += d[i][j - 1];
}
}
// 列前缀和
for (int j = 1; j <= n; ++j) {
for (int i = 2; i <= n; ++i) {
d[i][j] += d[i - 1][j];
}
}
// 输出结果
for (int i = 1; i <= n; ++i) {
for (int j = 1; j <= n; ++j) {
cout << d[i][j] << " ";
}
cout << endl;
}
return 0;
}算法分析
- 时间复杂度:O (n² + m),处理
m个地毯 O (m),还原矩阵 O (n²),n<=1e3时n²=1e6,完全满足时间要求; - 空间复杂度:O (n²),存储二维差分数组;
- 优势:相比暴力遍历每个地毯的子矩阵(O (m×n²)),二维差分将时间复杂度降低了许多,是解决此类问题的最佳方案。
四、差分与前缀和的关系:互逆运算的协同应用
差分与前缀和是互逆运算,二者结合能完美解决 “多次区间修改 + 多次区间查询” 的复杂问题,这也是算法竞赛中最常见的场景之一。
4.1 互逆关系的数学表达
- 差分是前缀和的逆运算:
- 对数组
a求差分得到d,再对d求前缀和,得到的仍是a; - 公式表示:
prefix_sum(diff(a)) = a。
- 对数组
- 前缀和是差分的逆运算:
- 对数组
d求前缀和得到a,再对a求差分,得到的仍是d; - 公式表示:
diff(prefix_sum(d)) = d。
- 对数组
4.2 协同应用场景:多次区间修改 + 多次区间查询
当需要同时处理 “多次区间修改” 和 “多次区间查询” 时,单独使用差分或前缀和都无法满足需求,需二者结合:
- 用差分处理区间修改:每次修改 O (1),总时间 O (q);
- 用前缀和处理区间查询:先将差分数组还原为原始数组(O (n)),再构建前缀和数组(O (n)),每次查询 O (1),总时间 O (n + q')(q' 为查询次数)。
示例:一维数组的 “修改 + 查询”
假设需要对数组a执行m次区间修改(每次[l,r]加k)和q次区间查询(每次查询[l,r]的和),代码实现如下:
#include <iostream>
using namespace std;
typedef long long LL;
const int N = 1e5 + 10;
int n, m, q;
LL d[N + 2]; // 差分数组
LL pre[N]; // 前缀和数组(用于查询)
int main() {
ios::sync_with_stdio(false);
cin.tie(nullptr);
cin >> n >> m >> q;
// 处理m次区间修改
for (int i = 0; i < m; ++i) {
int l, r;
LL k;
cin >> l >> r >> k;
d[l] += k;
d[r + 1] -= k;
}
// 还原原始数组并构建前缀和数组
LL current = 0;
pre[0] = 0;
for (int i = 1; i <= n; ++i) {
current += d[i];
pre[i] = pre[i - 1] + current; // pre[i]是前i个元素的和
}
// 处理q次区间查询
while (q--) {
int l, r;
cin >> l >> r;
cout << pre[r] - pre[l - 1] << endl;
}
return 0;
}4.3 二维场景的协同应用
对于矩阵的 “多次子矩阵修改 + 多次子矩阵查询”,同样也可以结合二维差分与二维前缀和:
- 用二维差分处理子矩阵修改(O (1) 每次);
- 还原矩阵后,构建二维前缀和数组(O (n×m));
- 每次子矩阵查询通过二维前缀和实现(O (1) 每次)。
五、差分算法常见误区与优化技巧
5.1 常见误区
误区 1:二维差分公式记错
- 当修改子矩阵时遗漏了某一步操作(如忘记
d[x2+1][y2+1] += k),导致还原后矩阵错误; - 解决方案:牢记二维差分的 “四步操作”——“加左上、减右上、减左下、加右下”,可联想为 “抵消多余修改” 的逻辑,确保子矩阵外的元素不受影响。
误区 2:差分数组大小不足
- 现象:一维差分数组长度为
n,导致r=n时d[r+1]越界;二维差分数组为n×m,导致x2=n或y2=m时越界; - 解决方案:一维差分数组长度设为
n+2,二维差分数组设为(n+2)×(m+2),预留足够的边界空间。
误区 3:数据类型使用错误
- 现象:使用
int类型存储差分数组或前缀和,导致数据溢出; - 解决方案:无论一维还是二维,差分数组、前缀和数组、临时变量均使用
long long类型,尤其是处理 1e5 规模的修改时。
误区 4:还原矩阵时前缀和顺序错误
- 现象:二维差分还原时先求列前缀和,再求行前缀和,导致结果错误;
- 解决方案:二维前缀和的顺序不影响结果(先 row 后 column 或反之均可),但需确保每行 / 每列的前缀和计算完整,避免遗漏。
5.2 优化技巧
技巧 1:空间优化
- 一维差分:若无需保留原始差分数组,可直接在差分数组上计算前缀和并输出,无需额外存储原始数组;
- 二维差分:同理,还原矩阵时可直接在差分数组上修改,无需额外开辟空间存储最终矩阵。
技巧 2:输入输出优化
- 当数据规模较大(如
n=1e5或n=1e3)时,必须使用ios::sync_with_stdio(false); cin.tie(nullptr);加速输入输出,否则cin/cout的默认同步机制会导致 TLE。
技巧 3:函数封装
- 将差分的核心操作(如一维的区间修改、二维的子矩阵修改)封装为函数(如前文的
insert函数),可减少代码冗余,降低出错概率,提高代码可读性。
技巧 4:边界预处理
- 对于二维差分,可提前将差分数组的
0行和0列初始化为 0,避免处理i=1或j=1时的边界判断,简化代码逻辑。
总结
差分算法的应用远不止本文介绍的内容,在后续的前缀和优化 DP、滑动窗口等算法中,差分也会作为辅助工具出现。因此,熟练掌握差分算法,不仅能解决当前的基础问题,更能为后续的算法学习打下坚实基础。 希望本文能帮助大家深入理解差分算法的原理与应用。如果在学习过程中遇到问题,欢迎在评论区留言讨论!
本文参与 腾讯云自媒体同步曝光计划,分享自作者个人站点/博客。
原始发表:2026-01-13,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号