【文末有福利】NVIDIA Isaac开发平台全方位解锁具身智能开发困局

【文末有福利】NVIDIA Isaac开发平台全方位解锁具身智能开发困局

GPUS Lady
发布于 2025-12-25 14:30:02
发布于 2025-12-25 14:30:02
各位开发者注意!从本篇起,我们将推出系列实操教程,带大家从 Isaac Sim 仿真环境 入手,无缝衔接 Jetson 硬件平台,完成真机部署与虚实结果验证,打通机器人开发、测试、落地全链路。
文末还有福利,欢迎大家关注。
在具身智能的探索浪潮中,如何高效、安全地训练和验证能够理解并改变物理世界的机器人,已成为行业面临的核心挑战。但传统开发模式其正面临着一系列严峻的挑战,严重制约着从算法创新到现实部署的进程。这些挑战主要体现在下面四个方面:
- 高昂的试错成本与安全风险:实体机器人的硬件损耗、碰撞损坏以及在不稳定环境下测试带来的风险,使得每一次实体调试都代价不菲。
- 数据匮乏与长尾场景难题:在现实世界中收集海量、特别是罕见但关键的“边缘案例”数据(如突然的干扰、极端光线天气)几乎不可能,导致算法存在致命盲区。
- 算法、硬件与环境的强耦合困局:软件算法的微小改动可能需要硬件调整,反之亦然,形成“牵一发而动全身”的迭代僵局,开发效率低下。
- “仿真到现实”的可靠性鸿沟:在简化仿真中表现优异的算法,往往因模型失配而无法在复杂的物理世界中保持同样性能。
这些问题的相互交织,成为制约具身机器人技术规模化落地的最关键阻碍,而仿真模拟绝对是解决上述问题的最重要方式。
Gazebo + ROS 2的开源组合应该目前市场上普及度最高的方案,毕竟二者都已存在将近20年的时间,在机电控制的灵活度与效能都不错,长期以来是机器人研发领域的标准仿真工具链,对创客与学生的科创项目在成本方面都比较友好,其开源生态、社区支持和与 ROS 工具的高度集成使其广受欢迎,但在面对现代机器人系统日益复杂的需求时,该组合也暴露出若干关键短板,如下:
- 物理与渲染保真度有限:虽然支持基本的刚体动力学和传感器仿真(如激光雷达、摄像头),但其物理引擎(如 ODE、Bullet)在高精度接触建模、软体交互或多体耦合场景中表现一般;同时,其图形渲染能力较为基础,难以生成逼真的视觉数据用于训练深度学习模型。
- 大规模/多机器人仿真效率低:在处理大量机器人实体或复杂环境时容易出现性能瓶颈,尤其在 CPU 密集型仿真中帧率下降明显,难以支持大规模并行仿真实验。
- 传感器建模精度不足:传感器插件(如相机、IMU、LiDAR)多为简化模型,缺乏对噪声、畸变、运动模糊、多路径效应等真实世界因素的精细建模,限制了感知算法在仿真到现实(Sim2Real)迁移中的泛化能力。
- 开发与调试体验割裂:Gazebo 与 ROS 2 虽可集成,但调试流程常需跨多个终端、工具(如 rviz、rqt、gazebo GUI),且可视化与仿真的同步性较差;此外,Gazebo 的 Python API 支持较弱,限制了快速原型开发。
- 缺乏对 AI 工作流的原生支持:Gazebo 本质上是一个传统物理仿真器,未针对机器学习训练流程进行优化,例如不支持自动微分、策略梯度回传或与 RL 框架(如 RLLib、Isaac Gym)的无缝对接。虽然提供各种相关插件,能让开发者与模拟效果进一步集成, 不过这些都不是简单的工作。
下面是从 技术复杂度、工程成本、维护负担 三个维度进行分级评估的参考表:

综合以上因素,这个方案比较适合实验室级原型验证、小型机器人研发(如教学、科研原型)等任务,至于开发需要对环境场景有高精度感知,以及集成大量AI模型的具身智能机器人,就会显得力有未逮了。
剖析 NVIDIA Isaac AI 机器人开发平台
NVIDIA Isaac 开发平台自 2017 年发布 Isaac SDK 以来,历经 8 年持续迭代演进,从早期的基础开发套件逐步成长为覆盖机器人全生命周期开发的综合生态体系,期间经历了架构整合、功能升级与生态扩展等多次重要革新。Isaac 平台核心组件覆盖“仿真-学习-AI-部署”全流程,以下是各关键组件的核心功能:
- 底层支撑技术:主要包括以下支撑各核心组件运行的底层架构,无需单独开发,重点掌握其应用场景即可:
- Omniverse Kit:用于构建原生 Omniverse 应用和微服务的工具包。通过一组轻量级插件提供丰富的功能,这些插件使用 C 接口编写,以确保持久的 API 兼容性。此外还提供了一个 Python 解释器,方便用户进行脚本编写和自定义。
- PhysX高保真物理引擎:模拟机器人与环境的真实交互(如刚体碰撞、软体形变),确保仿真结果贴近现实,提升 Sim-to-Real 迁移成功率。
- OmniGraph:可视化工作流编排工具,通过拖拽节点连接“场景触发-数据处理-动作执行”流程(如“传感器检测到障碍物→触发导航避障”),无需编写大量代码;
- OpenUSD:跨平台 3D 场景描述标准,支持 Isaac Sim 与其他工具(如 Blender/Maya)的资产复用,简化场景搭建流程,使用 USD 交换文件格式来表示场景。通用场景描述 (USD) 是一种易于扩展的开源 3D 场景描述文件格式,由皮克斯开发,用于内容创建和不同工具之间的数据交换。由于其强大的功能和通用性,USD 不仅在视觉特效领域,而且在建筑、设计、机器人、制造等其他领域也得到了广泛应用。
2. 仿真平台 Isaac Sim:基于 NVIDIA Omniverse 构建的高保真机器人仿真引擎,支持虚拟开发、合成数据生成与虚实联动测试,是平台的基础工具。核心功能如下:
- 3D 场景搭建与机器人模型导入(支持 URDF 格式);
- 传感器仿真(相机/激光雷达/IMU);
- 合成数据生成(SDG);
- 软件在环(Software-in-the-Loop,简称SIL);
- 硬件在环(Hardware-in-the-Loop,简称HIL)测试;
- 集成ROS2 Bridge扩展:发布机器人关节状态、传感器数据,通过RViz2可视化接收数据,完成基础仿真通信
- SimReady 3D 资产:内置超 1000 个标准资产,包括拖拽机器人模型(如工业机械臂、AMR)一直到场景,还添加相机/深度传感器;
3. 学习框架 Isaac Lab:轻量级机器人学习工具,依托 Isaac Sim 实现大规模并行仿真训练,专注强化学习(RL)与模仿学习,大幅提升 AI 训练效率。其核心功能包括以下部分:
- 封装强化学习算法;
- 批量仿真训练;
- 奖励函数自定义;
- 仿真到现实(Sim-to-Real)迁移工具集;
- 自定义训练:修改配置文件(如机器人模型、训练场景、奖励函数),基于 GR00T Mimic 工具扩增示范数据集,优化训练效果
4. 融合 AI 技术:支持生成式 AI 与任务型 AI ,助力机器人实现感知、交互与决策。主要如下:
- 模型种类:持续增加中
- COSMOS生成式模型:世界基础模型(WFM),支持高保真合成数据生成、场景理解与环境建模,加速感知模型训练
- GR00T任务模型:视觉语言动作(VLA)模型,专注机器人任务交互(如根据语音指令完成抓取、导航),支持端到端任务部署。
- 模型获取:通过 NVIDIA NGC 平台下载预训练模型;
- 合成数据生成:在 Isaac Sim 中启用 COSMOS 扩展,设置场景参数(如光照、障碍物),生成带标注的图像/点云数据(用于感知模型训练);
- 模型部署:通过 TensorRT 优化 GR00T 模型,集成到 Isaac ROS 节点,实现“视觉输入-语言理解-动作输出”闭环(如识别物体后执行抓取指令)。
5. 部署接口Isaac ROS:基于ROS2构建的GPU加速机器人框架,提供模块化计算包,是连接仿真与真实机器人的关键枢纽。核心功能:
- CUDA 加速感知算法(SLAM/目标检测/3D 重建)、
- NITROS 零拷贝数据传输、
- 模块化 GEM 软件包(即插即用)、
- 边缘设备部署优化
持平地说,Gazebo + ROS2 的组合仅仅只是 IsaacSim 仿真平台的一部分,在面对未来空间智能的复杂问题就会显得捉襟见肘。
认识 NVIDIA Isaac AI 开发平台工作流
下面是基于 IsaacSim 模拟平台的工作流示意图:
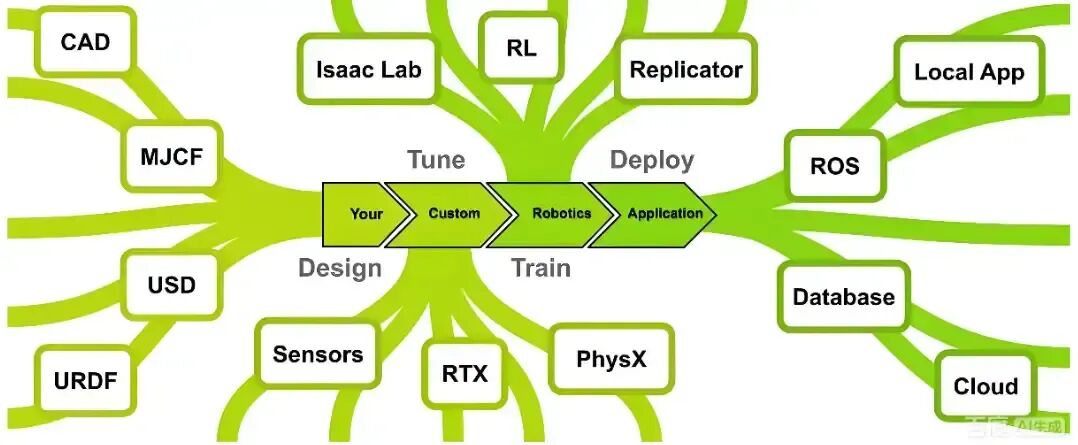
从左至右的阶段如下:
- 设计阶段:用于导入和调整以最常用格式设计的机械系统,包括 Onshape 、 统一机器人描述格式 (URDF) 和 MuJoCo XML 格式 (MJCF) 。这得益于通用场景描述 (USD) 的使用,USD 是一种易于扩展的开源 3D 场景描述 API,也是 Isaac Sim 的核心统一数据交换格式。
- 优化阶段:Isaac Sim 的核心功能在于“仿真”本身,一个基于 GPU 的高保真 PhysX 引擎 ,能够支持工业级多传感器 RTX 渲染 。Isaac Sim 可直接访问 GPU,使其平台能够支持各种传感器的仿真,包括摄像头 、激光雷达和接触式传感器 。这反过来又促进了数字孪生的仿真,使您的端到端流程能够在启动真实机器人之前运行。Isaac Sim 提供了一套工具,用于使用 Replicator 收集合成数据、通过 Omnigraph 编排仿真环境、调整 PhysX 仿真参数以匹配实际情况,以及最终通过各种方法(例如使用 Isaac Lab 进行强化学习 (RL))训练控制代理。
- 训练阶段:IsaacLab 扮演训练任务的导演角色,结合扮演“策略学习者”的强化学习算法与“数据的生成工厂”的Replicator,提供标准化的机器人任务模板、封装 环境构建逻辑(自动加载机器人 USD 模型、配置传感器、定义观测/动作空间)、管理训练生命周期(初始化、采样、更新、评估、日志记录)、支持多种学习范式(强化学习、行为克隆、域自适应)等等,然后放到 IsaacSim 上进行训练与模拟。
- 部署阶段:Isaac 预装了所有必要的组件,不仅可以将代理部署到真实机器人,还可以构建与此类系统完全集成的应用程序。Omniverse 提供应用程序基础架构的 API ,包括 GUI 创建和文件管理。Isaac Sim 平台还提供与 ROS 2 的桥接 API,用于实现真实机器人与仿真环境之间的直接通信,以及 NVIDIA Isaac ROS ,这是一套高性能、硬件加速的 ROS 2 软件包,用于构建自主机器人。
根据这个工作流,我们就能更加清楚整个 Isaac AI机器人开发平台里,各个软件的分工与协作直接的关系。了解清楚之后,我们后面就很容易开展工作。
下一步
当我们深入探索了 NVIDIA Isaac 平台的架构与组件后,不难发现其为机器人开发者提供的强大工具集和灵活的开发环境。Isaac 平台不仅简化了从仿真到部署的工作流程,还通过提供高性能计算能力、丰富的算法库以及详尽的文档支持,极大地降低了机器学习和机器人技术的门槛。
然而,随着机器人应用场景的日益复杂化,如何确保在虚拟环境中训练出的智能体能够无缝地迁移到现实世界,并且在真实环境下依然表现出色,成为了一个至关重要的议题。这就引出了接下来我们要探讨的两个关键概念:软件在环(Software-in-the-Loop, SIL)和硬件在环(Hardware-in-the-Loop, HIL),这两种测试方法对于验证和优化机器人系统的可靠性至关重要。
通过SIL,我们能够在早期阶段就对控制逻辑进行有效验证;而HIL则更进一步,将真实的硬件集成到仿真环境中,实现对整个系统更加严格的测试和校验。深入理解并应用SIL和HIL,不仅能提升开发效率,更能确保最终产品的稳定性和安全性。
在接下来的内容中,我们将详细解析这两种方法的重要性及其在IsaacSim中的具体实施策略。让我们一同期待,通过对SIL和HIL的深入探讨,揭开NVIDIA Isaac平台在实际应用中的无限潜力。
本文参与 腾讯云自媒体同步曝光计划,分享自微信公众号。
原始发表:2025-12-22,如有侵权请联系 cloudcommunity@tencent.com 删除
评论
登录后参与评论
推荐阅读
目录
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号