
编译和SPI电机驱动器屏蔽单独工作--但不能一起工作。
我使用的STM32F767单片机连同两个屏蔽: IHM02A1双步进电机驱动器。我还没有调试器,但我的公司有一个.
同时,我一直没有/注释出Mbed的部分代码。他们的Hello程序可以从这个网站获得,可以通过点击"Import“:https://os.mbed.com/components/X-NUCLEO-IHM02A1/直接在他们的在线IDE中使用
#include "mbed.h"
#include "DevSPI.h"
#include "XNucleoIHM02A1.h"
#define MPR_1 4 /* Number of movements per revolution. */
#define STEPS_1 (200 * 128) /* 1 revolution given a 200 steps motor configured at 1/128 microstep mode. */
#define STEPS_2 (STEPS_1 * 2)
/* Delay in milliseconds. */
#define DELAY_1 1000
#define DELAY_2 2000
#define DELAY_3 3000
/* Motor Control Expansion Board. */
XNucleoIHM02A1 *x_nucleo_ihm02a1;
XNucleoIHM02A1 *x_nucleo_ihm02a1two;
/* Initialization parameters of the motors connected to the expansion board. */
L6470_init_t init[L6470DAISYCHAINSIZE] = {
/* First Motor. */
{
24.0, /* Motor supply voltage in V. */
200, /* Min number of steps per revolution for the motor. */
1.7, /* Max motor phase voltage in A. */
3.06, /* Max motor phase voltage in V. */
300.0, /* Motor initial speed [step/s]. */
500.0, /* Motor acceleration [step/s^2] (comment for infinite acceleration mode). */
500.0, /* Motor deceleration [step/s^2] (comment for infinite deceleration mode). */
992.0, /* Motor maximum speed [step/s]. */
0.0, /* Motor minimum speed [step/s]. */
602.7, /* Motor full-step speed threshold [step/s]. */
3.06, /* Holding kval [V]. */
3.06, /* Constant speed kval [V]. */
3.06, /* Acceleration starting kval [V]. */
3.06, /* Deceleration starting kval [V]. */
61.52, /* Intersect speed for bemf compensation curve slope changing [step/s]. */
392.1569e-6, /* Start slope [s/step]. */
643.1372e-6, /* Acceleration final slope [s/step]. */
643.1372e-6, /* Deceleration final slope [s/step]. */
0, /* Thermal compensation factor (range [0, 15]). */
3.06 * 1000 * 1.10, /* Ocd threshold [ma] (range [375 ma, 6000 ma]). */
3.06 * 1000 * 1.00, /* Stall threshold [ma] (range [31.25 ma, 4000 ma]). */
StepperMotor::STEP_MODE_1_128, /* Step mode selection. */
0xFF, /* Alarm conditions enable. */
0x2E88 /* Ic configuration. */
},
/* Second Motor. */
{
24.0, /* Motor supply voltage in V. */
200, /* Min number of steps per revolution for the motor. */
1.7, /* Max motor phase voltage in A. */
3.06, /* Max motor phase voltage in V. */
300.0, /* Motor initial speed [step/s]. */
500.0, /* Motor acceleration [step/s^2] (comment for infinite acceleration mode). */
500.0, /* Motor deceleration [step/s^2] (comment for infinite deceleration mode). */
992.0, /* Motor maximum speed [step/s]. */
0.0, /* Motor minimum speed [step/s]. */
602.7, /* Motor full-step speed threshold [step/s]. */
3.06, /* Holding kval [V]. */
3.06, /* Constant speed kval [V]. */
3.06, /* Acceleration starting kval [V]. */
3.06, /* Deceleration starting kval [V]. */
61.52, /* Intersect speed for bemf compensation curve slope changing [step/s]. */
392.1569e-6, /* Start slope [s/step]. */
643.1372e-6, /* Acceleration final slope [s/step]. */
643.1372e-6, /* Deceleration final slope [s/step]. */
0, /* Thermal compensation factor (range [0, 15]). */
3.06 * 1000 * 1.10, /* Ocd threshold [ma] (range [375 ma, 6000 ma]). */
3.06 * 1000 * 1.00, /* Stall threshold [ma] (range [31.25 ma, 4000 ma]). */
StepperMotor::STEP_MODE_1_128, /* Step mode selection. */
0xFF, /* Alarm conditions enable. */
0x2E88 /* Ic configuration. */
}
};
int main()
{
/* Initializing SPI bus. */
#ifdef TARGET_STM32F429
DevSPI dev_spi(D11, D12, D13);
#else
DevSPI dev_spi(D11, D12, D13);
#endif
/* Initializing Motor Control Expansion Board. */
x_nucleo_ihm02a1 = new XNucleoIHM02A1(&init[0], &init[1], A4, A5, D4, D2, &dev_spi);
x_nucleo_ihm02a1two = new XNucleoIHM02A1(&init[0], &init[1], A4, A5, D4, A2, &dev_spi);
/* Building a list of motor control components. */
L6470 **motors = x_nucleo_ihm02a1->get_components();
L6470 **motorstwo = x_nucleo_ihm02a1two->get_components();
/* Setting the home position. */
//motorstwo[1]->set_home();
// wait_ms(DELAY_1);
int position = motorstwo[1]->get_position();
wait_ms(DELAY_1);
// motors[1]->move(StepperMotor::FWD, STEPS_2);
// motors[0]->move(StepperMotor::FWD, STEPS_2);
// wait_ms(DELAY_2);
motorstwo[1]->move(StepperMotor::FWD, STEPS_2);
motorstwo[0]->move(StepperMotor::FWD, STEPS_2);
position = motorstwo[1]->get_position();
wait_ms(DELAY_1);
}这是整个程序的最低可重现性示例。如果您想自己尝试,只需将其复制/粘贴到main.cpp (在上面提到的在线IDE中)。
一切都符合,没有警告。下面的任何一条线(有匹配的指针等等)都是通过移动马达来工作的。也就是说,摩托车和摩托车都是靠自己的力量来完成的。但是当两条线都装到board...nothing工作时,马达就不动了。步行者甚至没有一个非常柔和的声音从他们。
x_nucleo_ihm02a1 = new XNucleoIHM02A1(&init[0], &init[1], A4, A5, D4, D2, &dev_spi);
x_nucleo_ihm02a1two = new XNucleoIHM02A1(&init[0], &init[1], A4, A5, D4, A2, &dev_spi);为什么这两行不能上传到一起呢?怎么解决这个问题呢?
编辑
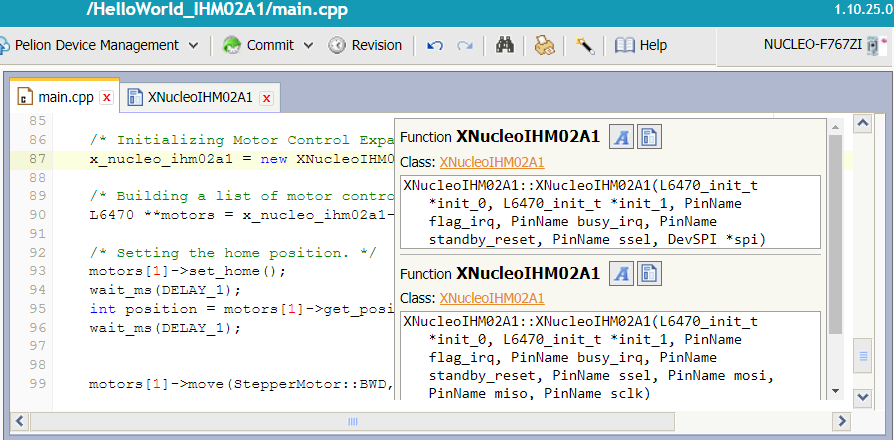
该类包含两个用于"XNucleoIHM02A1“的函数。有七个周长的那个是到dissect...the的第二个最后一个论点的声音被改变(ssel:)
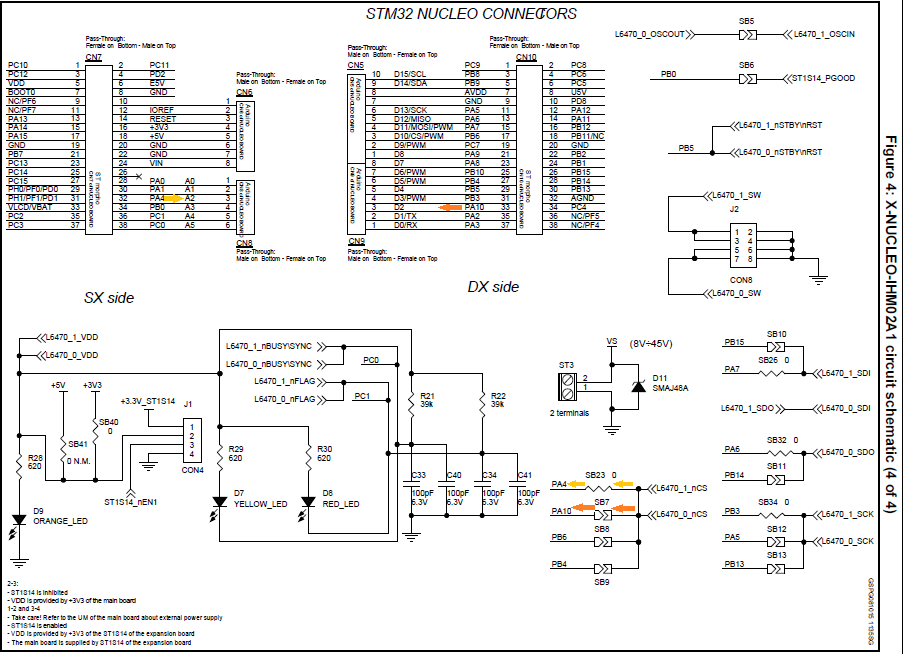
查看Nucleo原理图,您会注意到L6470_1_SDO (串行数据输出)连接到L6470__SDI (Serial )。这是雏菊链的配置。还请注意桥接SB7如何引导到板上的D2引脚。
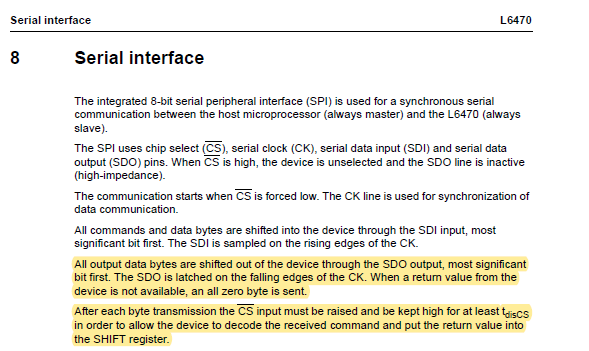
查看部分数据表,当/CS较低时,它将开始读取数据,并将一直将数据移出直到/CS高。
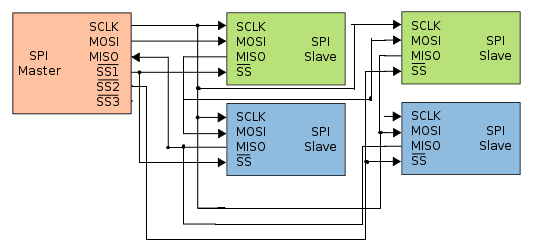
通过堆叠第二个板子,这个配置结果--它是上面的雏菊链和单独寻址版本的结合:
硬件文档
短数据表。长数据表。
回答 1
Stack Overflow用户
发布于 2019-08-14 19:24:25
你说你有两个盾牌?每个盾牌上都有一个IHM02A1驱动程序?请详细说明..。
如果是这样的话,您可以使用相同的SPI总线,但您将需要一个单独的芯片选择线为每个屏蔽。
我不太喜欢Arduino用户,所以我不太熟悉他们的司机。我下载了这个示例项目并快速浏览了一下:
对于IHM02A1类,构造函数如下所示:
XNucleoIHM02A1(L6470_init_t *init_0, L6470_init_t *init_1, uint8_t flag_irq, uint8_t busy_irq, uint8_t standby_reset, uint8_t ssel, SPIClass *spi);其中参数有以下描述:
/**
* @brief Constructor.
* @param init_0 pointer to the initialization structure of the first motor.
* @param init_1 pointer to the initialization structure of the second motor.
* @param flag_irq pin name of the FLAG pin of the component.
* @param busy_irq pin name of the BUSY pin of the component.
* @param standby_reset pin name of the STBY\RST pin of the component.
* @param ssel pin name of the SSEL pin of the SPI device to be used for communication.
* @param spi SPI device to be used for communication.
*/第六个参数是选择引脚。这是你必须为每个盾牌指定选择引脚的地方。
然后,您将需要类XNucleoIHM02A1的两个实例,每个屏蔽一个。这不是每台马达的一个实例。这个班已经为两台电动机做好了准备。
XNucleoIHM02A1 *x_nucleo_ihm02a1_shield1; // Class for shield 1
XNucleoIHM02A1 *x_nucleo_ihm02a1_shield2; // Class for shield 2
x_nucleo_ihm02a1_shield1 = new XNucleoIHM02A1(&init[0], &init[1], FLAG1, BUSY1, STBY_RST1, SS1, &dev_spi);
x_nucleo_ihm02a1_shield2 = new XNucleoIHM02A1(&init[0], &init[1], FLAG2, BUSY2, STBY_RST2, SS2, &dev_spi);其中SS1和SS2是芯片选择引脚。注:您必须填写这些实际的引脚号码。
您还必须确保正确定义了其余的参数。您很可能需要单独的引脚为旗子,繁忙和STBY/RST为每个屏蔽。因此,我定义了参数FLAG1、FLAG2、BUSY1、BUSY2、STBY_RST1、STBY_RST2。注:您必须填写这些实际的引脚号码。
增编:
如果每个电机需要不同的参数,那么需要四种不同的init结构:
L6470_init_t init_shield1[L6470DAISYCHAINSIZE] = {...};
L6470_init_t init_shield2[L6470DAISYCHAINSIZE] = {...};
x_nucleo_ihm02a1_shield1 = new XNucleoIHM02A1(&init_shield1[0], &init_shield1[1], FLAG1, BUSY1, STBY_RST1, SS1, &dev_spi);
x_nucleo_ihm02a1_shield2 = new XNucleoIHM02A1(&init_shield2[0], &init_shield2[1], FLAG2, BUSY2, STBY_RST2, SS2, &dev_spi);但是,如果所有的电机都有相同的参数和/或要求,那么您只需要一个init结构。
L6470_init_t init[L6470DAISYCHAINSIZE] = {...};
x_nucleo_ihm02a1_shield1 = new XNucleoIHM02A1(&init[0], &init[1], FLAG1, BUSY1, STBY_RST1, SS1, &dev_spi);
x_nucleo_ihm02a1_shield2 = new XNucleoIHM02A1(&init[0], &init[1], FLAG2, BUSY2, STBY_RST2, SS2, &dev_spi);您需要为每个屏蔽调用"get_components“:
// For easier reading
#define L6470_S1M1 (0u) // Index of shield1 motor1
#define L6470_S1M2 (1u) // Index of shield1 motor2
#define L6470_S2M1 (0u) // Index of shield2 motor1
#define L6470_S2M2 (1u) // Index of shield2 motor2
L6470 **motors_shield1 = x_nucleo_ihm02a1_shield1->get_components();
L6470 **motors_shield2 = x_nucleo_ihm02a1_shield2->get_components();然后,您以下列方式操作电机:
motors_shield1[L6470_S1M1]->set_home(); // Home motor1 on shield1
motors_shield1[L6470_S1M2]->set_home(); // Home motor2 on shield1
motors_shield2[L6470_S2M1]->set_home(); // Home motor1 on shield2
motors_shield2[L6470_S2M2]->set_home(); // Home motor2 on shield2https://stackoverflow.com/questions/57434935
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号