
用隐式欧拉求解python中的PDE错误输出
我会尽力解释到底是怎么回事和我的问题。
这是有点马虎,所以不支持乳胶,所以可悲的是,我不得不求助于图像。我希望这样可以。
我不知道为什么会倒转,很抱歉。无论如何,这是一个线性系统Ax = b,在这里我们知道A和b,所以我们可以找到x,这是我们在下一步的近似。我们继续这样做,直到时间t_final。
这是密码
import numpy as np
tau = 2 * np.pi
tau2 = tau * tau
i = complex(0,1)
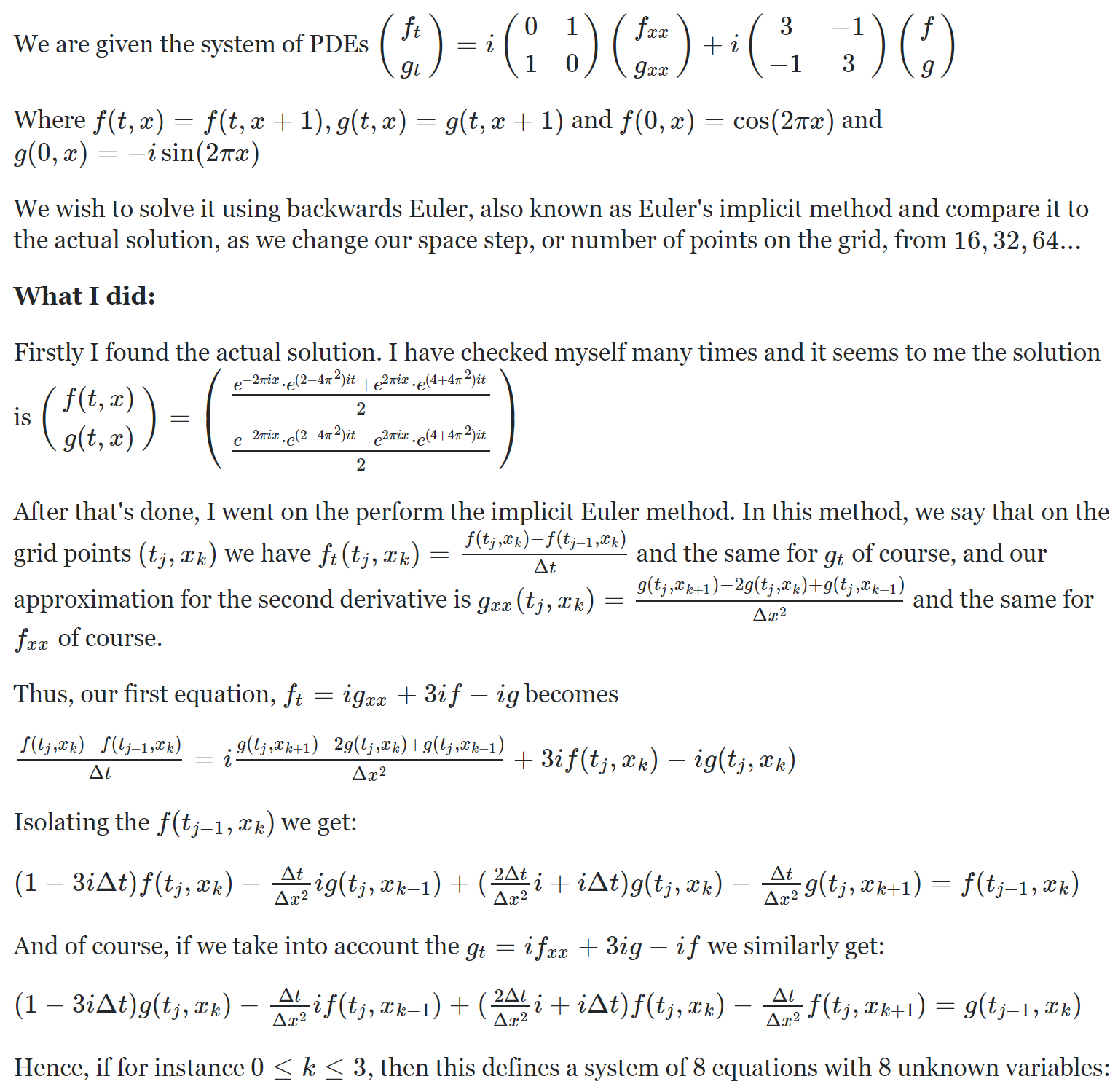
def solution_f(t, x):
return 0.5 * (np.exp(-tau * i * x) * np.exp((2 - tau2) * i * t) + np.exp(tau * i * x) * np.exp((tau2 + 4) * i * t))
def solution_g(t, x):
return 0.5 * (np.exp(-tau * i * x) * np.exp((2 - tau2) * i * t) - np.exp(tau * i * x) * np.exp((tau2 + 4) * i * t))
for l in range(2, 12):
N = 2 ** l #number of grid points
dx = 1.0 / N #space between grid points
dx2 = dx * dx
dt = dx #time step
t_final = 1
approximate_f = np.zeros((N, 1), dtype = np.complex)
approximate_g = np.zeros((N, 1), dtype = np.complex)
#Insert initial conditions
for k in range(N):
approximate_f[k, 0] = np.cos(tau * k * dx)
approximate_g[k, 0] = -i * np.sin(tau * k * dx)
#Create coefficient matrix
A = np.zeros((2 * N, 2 * N), dtype = np.complex)
#First row is special
A[0, 0] = 1 -3*i*dt
A[0, N] = ((2 * dt / dx2) + dt) * i
A[0, N + 1] = (-dt / dx2) * i
A[0, -1] = (-dt / dx2) * i
#Last row is special
A[N - 1, N - 1] = 1 - (3 * dt) * i
A[N - 1, N] = (-dt / dx2) * i
A[N - 1, -2] = (-dt / dx2) * i
A[N - 1, -1] = ((2 * dt / dx2) + dt) * i
#middle
for k in range(1, N - 1):
A[k, k] = 1 - (3 * dt) * i
A[k, k + N - 1] = (-dt / dx2) * i
A[k, k + N] = ((2 * dt / dx2) + dt) * i
A[k, k + N + 1] = (-dt / dx2) * i
#Bottom half
A[N :, :N] = A[:N, N:]
A[N:, N:] = A[:N, :N]
Ainv = np.linalg.inv(A)
#Advance through time
time = 0
while time < t_final:
b = np.concatenate((approximate_f, approximate_g), axis = 0)
x = np.dot(Ainv, b) #Solve Ax = b
approximate_f = x[:N]
approximate_g = x[N:]
time += dt
approximate_solution = np.concatenate((approximate_f, approximate_g), axis=0)
#Calculate the actual solution
actual_f = np.zeros((N, 1), dtype = np.complex)
actual_g = np.zeros((N, 1), dtype = np.complex)
for k in range(N):
actual_f[k, 0] = solution_f(t_final, k * dx)
actual_g[k, 0] = solution_g(t_final, k * dx)
actual_solution = np.concatenate((actual_f, actual_g), axis = 0)
print(np.sqrt(dx) * np.linalg.norm(actual_solution - approximate_solution))它不起作用。至少不是在一开始,它不应该开始这么慢。我应该无条件地稳定,并收敛到正确的答案。
这里出什么问题了?
回答 1
Stack Overflow用户
发布于 2019-03-27 17:53:12
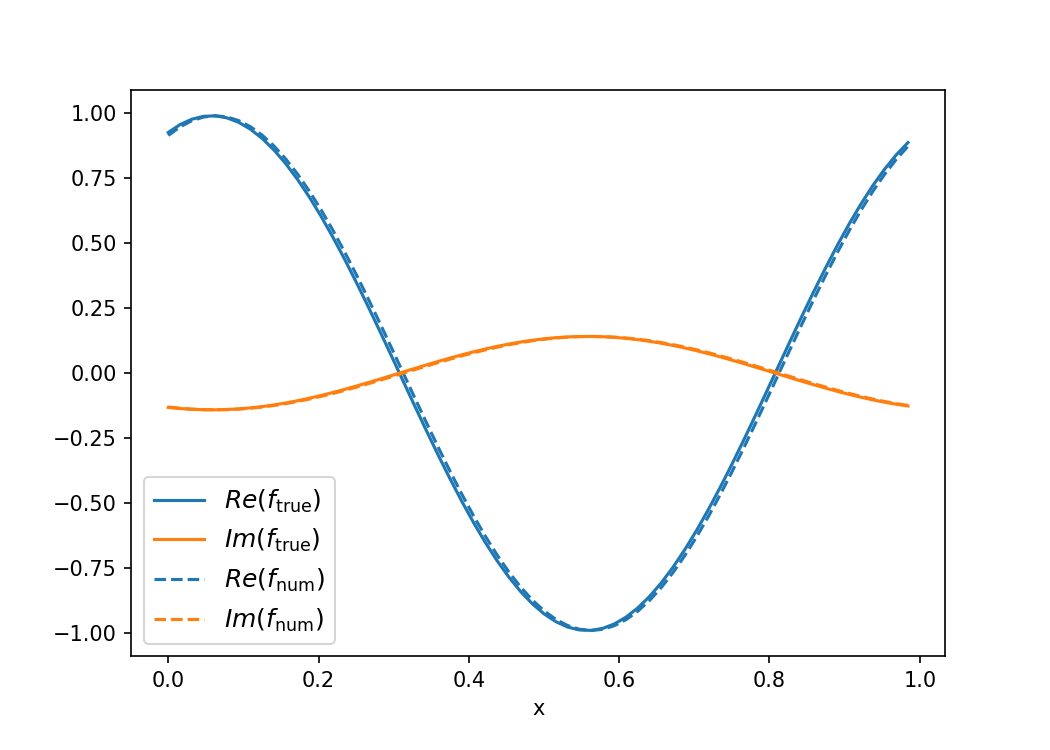
L2-范数可能是测试收敛性的有用指标,但在调试时并不理想,因为它不能解释问题是什么。尽管您的解决方案应该是无条件稳定的,但向后Euler不一定会收敛到正确的答案。正如前欧拉是出了名的不稳定(反耗散),向后欧拉是著名的耗散。你的解决方案证明了这一点。数值解收敛到零。对于下一阶近似,克兰克-尼科尔森是一个合理的候选人。下面的代码包含了更通用的theta-方法,这样您就可以调优解决方案的隐式性。theta=0.5给CN,theta=1给BE,theta=0给FE。我还调整了几件事:
- 我选择了一个更合适的时间步长为dt = ( dx **2)/2,而不是dt =dx。后者不能通过CN收敛到正确的解决方案。
- 这是一个次要的注意事项,但由于t_final不一定是dt的倍数,所以您没有在同一时间步骤中比较解决方案。
- 关于你的评论,它是缓慢的:随着空间分辨率的提高,你的时间分辨率也需要增加。即使在使用dt=dx的情况下,也必须执行(1024x1024)* 1024矩阵乘法1024次。我没有发现这个在我的机器上花了很长时间。为了加快速度,我删除了一些不必要的连接,但不幸的是,将时间步骤更改为dt = (dx**2)/2会使事情陷入困境。如果你关心速度,你可以试着用Numba编译。
所有这些,我并没有找到巨大的成功与一致性的CN。我必须设置N=2^6才能在t_final=1上得到任何东西。增加t_final会使情况更糟,减少t_final会使情况更好。根据您的需要,您可以考虑实现TR-BDF2 2或其他线性多步方法来改进这一点。
有情节的代码如下:
import numpy as np
import matplotlib.pyplot as plt
tau = 2 * np.pi
tau2 = tau * tau
i = complex(0,1)
def solution_f(t, x):
return 0.5 * (np.exp(-tau * i * x) * np.exp((2 - tau2) * i * t) + np.exp(tau * i * x) * np.exp((tau2 + 4) * i * t))
def solution_g(t, x):
return 0.5 * (np.exp(-tau * i * x) * np.exp((2 - tau2) * i * t) - np.exp(tau * i * x) *
np.exp((tau2 + 4) * i * t))
l=6
N = 2 ** l
dx = 1.0 / N
dx2 = dx * dx
dt = dx2/2
t_final = 1.
x_arr = np.arange(0,1,dx)
approximate_f = np.cos(tau*x_arr)
approximate_g = -i*np.sin(tau*x_arr)
H = np.zeros([2*N,2*N], dtype=np.complex)
for k in range(N):
H[k,k] = -3*i*dt
H[k,k+N] = (2/dx2+1)*i*dt
if k==0:
H[k,N+1] = -i/dx2*dt
H[k,-1] = -i/dx2*dt
elif k==N-1:
H[N-1,N] = -i/dx2*dt
H[N-1,-2] = -i/dx2*dt
else:
H[k,k+N-1] = -i/dx2*dt
H[k,k+N+1] = -i/dx2*dt
### Bottom half
H[N :, :N] = H[:N, N:]
H[N:, N:] = H[:N, :N]
### Theta method. 0.5 -> Crank Nicolson
theta=0.5
A = np.eye(2*N)+H*theta
B = np.eye(2*N)-H*(1-theta)
### Precompute for faster computations
mat = np.linalg.inv(A)@B
t = 0
b = np.concatenate((approximate_f, approximate_g))
while t < t_final:
t += dt
b = mat@b
approximate_f = b[:N]
approximate_g = b[N:]
approximate_solution = np.concatenate((approximate_f, approximate_g))
#Calculate the actual solution
actual_f = solution_f(t,np.arange(0,1,dx))
actual_g = solution_g(t,np.arange(0,1,dx))
actual_solution = np.concatenate((actual_f, actual_g))
plt.figure(figsize=(7,5))
plt.plot(x_arr,actual_f.real,c="C0",label=r"$Re(f_\mathrm{true})$")
plt.plot(x_arr,actual_f.imag,c="C1",label=r"$Im(f_\mathrm{true})$")
plt.plot(x_arr,approximate_f.real,c="C0",ls="--",label=r"$Re(f_\mathrm{num})$")
plt.plot(x_arr,approximate_f.imag,c="C1",ls="--",label=r"$Im(f_\mathrm{num})$")
plt.legend(loc=3,fontsize=12)
plt.xlabel("x")
plt.savefig("num_approx.png",dpi=150)
https://stackoverflow.com/questions/55247359
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号