
在实际TurtleBot中测试基于里程法的slam算法生成的质量较差的地图
在实际TurtleBot中测试基于里程法的slam算法生成的质量较差的地图
提问于 2019-01-25 11:54:05
我目前正在一个真正的TurtleBot(ROS Kinetic)中测试几个slam算法。尽管在TurtleBot上一切看起来都很好,但我在地图上遇到了一个问题,这个问题来自基于里程法的slam算法。虽然我更改了TurtleBot基础,以确定该基座是否有硬件或计量学问题,但地图保持不变。我使用的激光雷达的最大射程可达17米。
with (使用计量学)--我用以下参数测试了with:
<launch>
<arg name="scan_topic" default="scan" />
<arg name="base_frame" default="base_footprint"/>
<arg name="odom_frame" default="odom"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg base_frame)"/>
<param name="odom_frame" value="$(arg odom_frame)"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="12.0"/>
<param name="maxRange" value="17.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="500"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.5"/>
<param name="angularUpdate" value="0.436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="200"/>
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
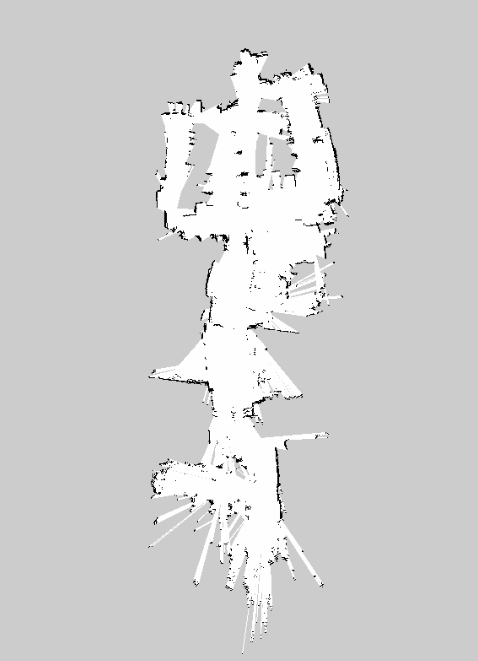
</launch>在整个实验室中测试的here的地图如下:
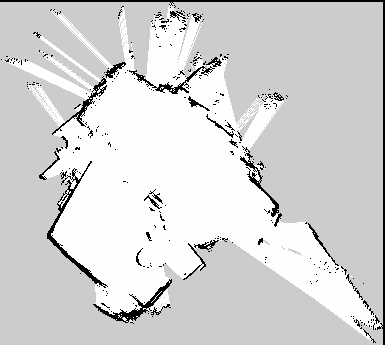
KartoSlam(using计量学) KartoSlam在实验室的房间里测试出的默认参数的地图是这样的。
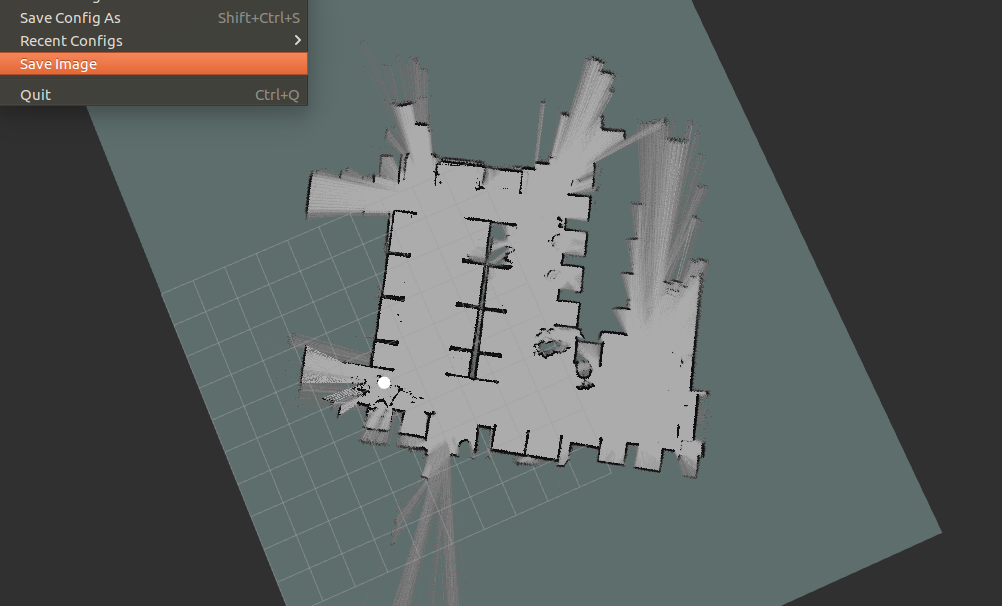
CRSM Slam (不使用测定仪)由CRSM Slam制作的地图在实验室的房间里测试过,不使用测定仪。如您所见,CRSM映射要比前两张要好得多。
问题如下:
既然我已经在两个不同的TurtleBots上尝试过算法,那么我应该在哪里寻找修复呢?我怎样才能提高地图的质量,因为到目前为止,我得到的是真的很差?
回答 1
Stack Overflow用户
回答已采纳
发布于 2019-03-06 02:39:09
我发现一个测试基本节理的好方法是:
- 启动turtlebots时,只需最小限度的无slam或任何其他slam。
- 启动rviz并确保将固定帧设置为世界框架,如odom或map (验证TF树中的名称)。
- 再加上激光,设定约100秒的衰减时间。
- 保持机器人在墙前,并命令它向墙移动。当机器人向前移动时,你的世界帧中的激光数据中的“墙的位置”应该看上去或多或少是文具。这给了你一个保证,你的前向测定仪是好的。
- 然后把机器人放置在一个角落或某个地方,其中有大的三维物体在激光的视野。然后命令机器人旋转。再一次,所有的角和三维物体应该保持静止。
如果您能够成功地完成上述操作,那么在使用SLAM算法之前,您应该能够做出合理的“原始”映射。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/54364850
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号