
通过码头容器运行Bot仿真器
我有一个正常工作的机器人与机器人emulator.When交互,我添加了对接器支持,模拟器停止了与机器人的交互。
我读到,我应该不检查模拟器设置中的“绕行ngrok本地地址”,并配置ngrok。
我很难理解我应该做什么,我下载了ngrok.exe并打开了一个名为"ngrok.exe“的命令行。
正在运行的项目的路径是:"http://localhost:32768/api/messages“。
我应该如何配置ngrok,以便模拟器开始与机器人交互?
任何其他方法都会很好..。
回答 1
Stack Overflow用户
发布于 2019-01-17 00:47:59
我终于能够让我的码头容器与我的仿真器一起工作,所以我将向您展示我必须改变什么才能使它工作!使用:模拟器4.2.1、ngrok和一个示例回波机器人:
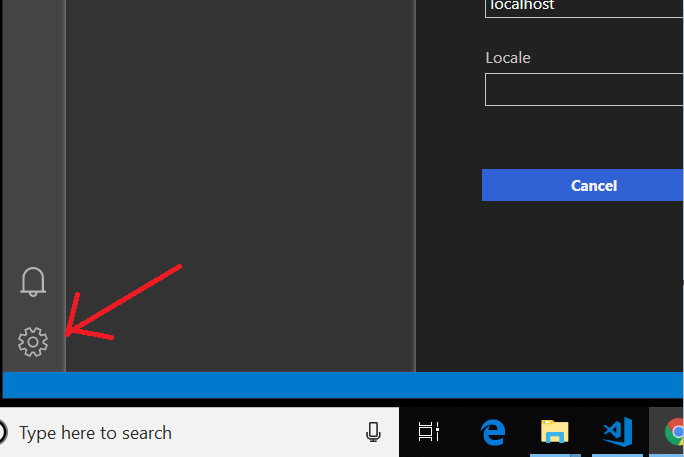
将ngrok.exe文件放在可以找到它的地方。我的在我桌面上的文件夹里。然后打开模拟器。在左下角,有一个用于模拟器设置的齿轮:
那一页会打开..。模拟器设置。在此页面中,使用“浏览”按钮导航到并选择ngrok.exe文件:
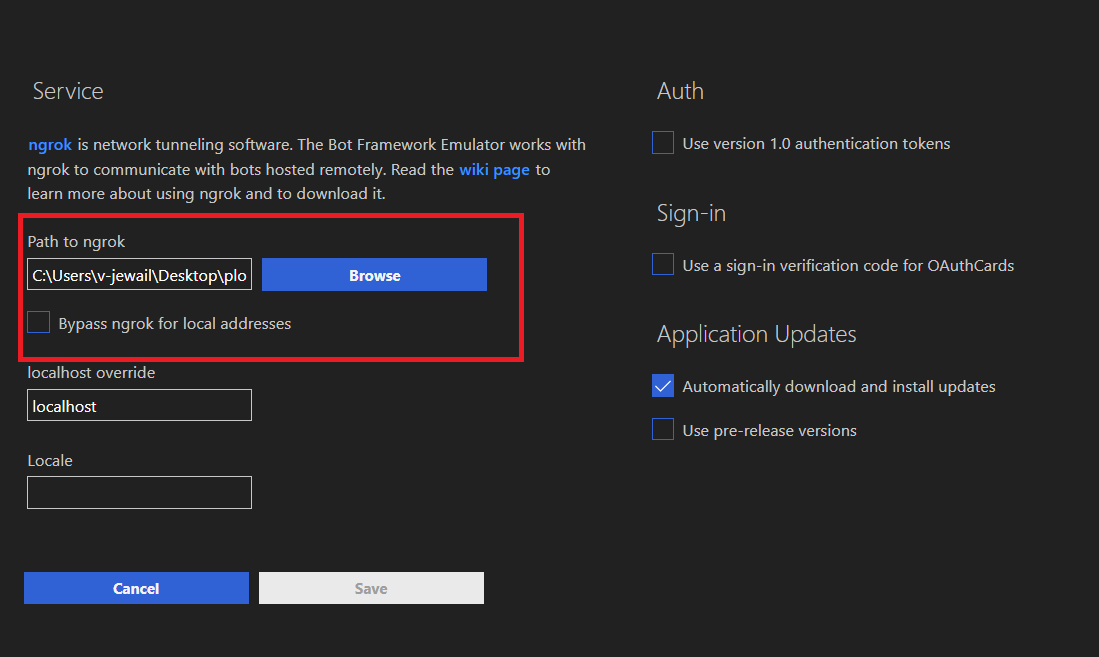
我发现,我是否检查了“旁路”盒子,对我来说并不重要。
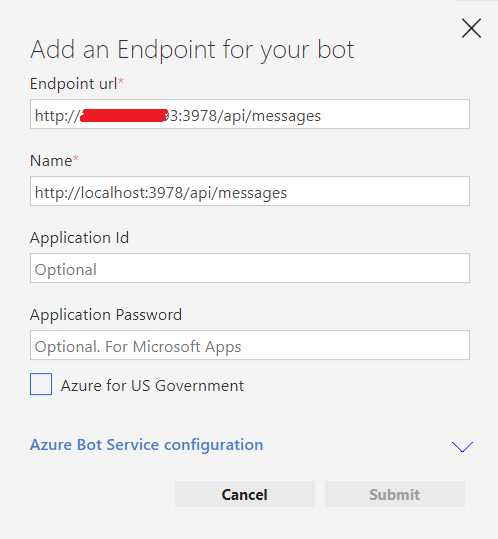
注意(以下是拯救我的东西):localhost映射到我的ipv4
我在命令提示符中运行ipconfig /all以获取IPv4,然后返回模拟器。在我的机器人的配置中,我应该放在我的端点(通常是https://localhost:3978/api/messages)中,我用我的IPv4替换了'localhost‘这个词:
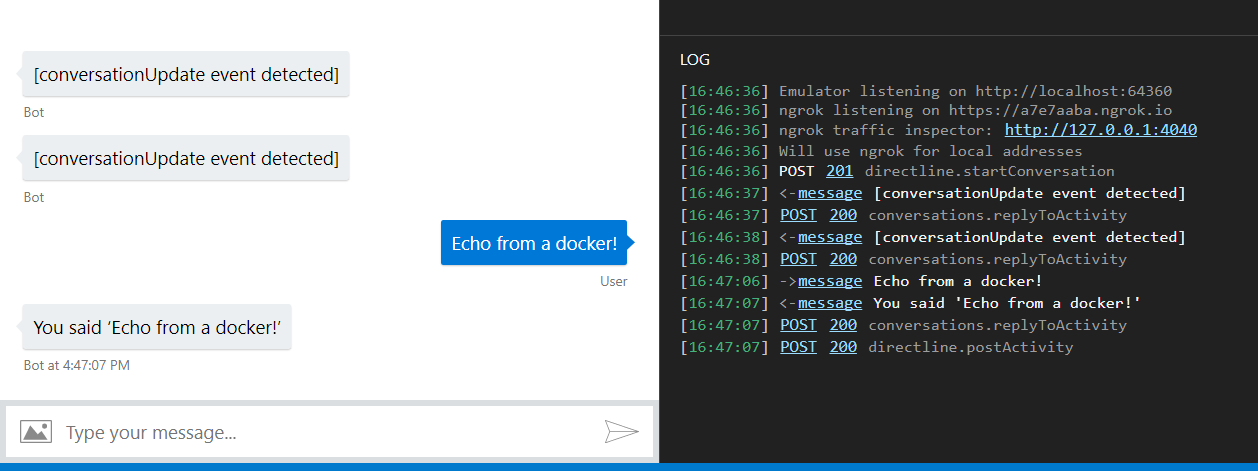
在我这么做之后,我就可以和我的机器人说话了:
https://stackoverflow.com/questions/53490912
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号