
GLSL中光线跟踪着色器的优化
我已经编码了一个基于体素化的射线追踪器,它可以像预期的那样工作,但是非常慢。
目前,射线追踪程序代码如下:
#version 430
//normalized positon from (-1, -1) to (1, 1)
in vec2 f_coord;
out vec4 fragment_color;
struct Voxel
{
vec4 position;
vec4 normal;
vec4 color;
};
struct Node
{
//children of the current node
int children[8];
};
layout(std430, binding = 0) buffer voxel_buffer
{
//last layer of the tree, the leafs
Voxel voxels[];
};
layout(std430, binding = 1) buffer buffer_index
{
uint index;
};
layout(std430, binding = 2) buffer tree_buffer
{
//tree structure
Node tree[];
};
layout(std430, binding = 3) buffer tree_index
{
uint t_index;
};
uniform vec3 camera_pos; //position of the camera
uniform float aspect_ratio; // aspect ratio of the window
uniform float cube_dim; //Dimenions of the voxelization cube
uniform int voxel_resolution; //Side length of the cube in voxels
#define EPSILON 0.01
// Detect whether a position is inside of the voxel with size size located at corner
bool inBoxBounds(vec3 corner, float size, vec3 position)
{
bool inside = true;
position-=corner;//coordinate of the position relative to the box coordinate system
//Test that all coordinates are inside the box, if any is outisde, the point is out the box
for(int i=0; i<3; i++)
{
inside = inside && (position[i] > -EPSILON);
inside = inside && (position[i] < size+EPSILON);
}
return inside;
}
//Get the distance to a box or infinity if the box cannot be hit
float boxIntersection(vec3 origin, vec3 dir, vec3 corner0, float size)
{
dir = normalize(dir);
vec3 corner1 = corner0 + vec3(size,size,size);//Oposite corner of the box
float coeffs[6];
//Calculate the intersaction coefficients with te 6 bonding planes
coeffs[0] = (corner0.x - origin.x)/(dir.x);
coeffs[1] = (corner0.y - origin.y)/(dir.y);
coeffs[2] = (corner0.z - origin.z)/(dir.z);
coeffs[3] = (corner1.x - origin.x)/(dir.x);
coeffs[4] = (corner1.y - origin.y)/(dir.y);
coeffs[5] = (corner1.z - origin.z)/(dir.z);
//by default the distance to the box is infinity
float t = 1.f/0.f;
for(uint i=0; i<6; i++){
//if the distance to a boxis negative, we set it to infinity as we cannot travel in the negative direction
coeffs[i] = coeffs[i] < 0 ? 1.f/0.f : coeffs[i];
//The distance is the minumum of the previous calculated distance and the current distance
t = inBoxBounds(corner0,size,origin+dir*coeffs[i]) ? min(coeffs[i],t) : t;
}
return t;
}
#define MAX_TREE_HEIGHT 11
int nodes[MAX_TREE_HEIGHT];
int levels[MAX_TREE_HEIGHT];
vec3 positions[MAX_TREE_HEIGHT];
int sp=0;
void push(int node, int level, vec3 corner)
{
nodes[sp] = node;
levels[sp] = level;
positions[sp] = corner;
sp++;
}
void main()
{
int count = 0; //count the iterations of the algorithm
vec3 r = vec3(f_coord.x, f_coord.y, 1.f/tan(radians(40))); //direction of the ray
r.y/=aspect_ratio; //modify the direction based on the windows aspect ratio
vec3 dir = r;
r += vec3(0,0,-1.f/tan(radians(40))) + camera_pos; //put the ray at the camera position
fragment_color = vec4(0);
int max_level = int(log2(voxel_resolution));//height of the tree
push(0,0,vec3(-cube_dim));//set the stack
float tc = 1.f; //initial color value, to be decreased whenever a voxel is hit
//tree variables
int level=0;
int node=0;
vec3 corner;
do
{
//pop from stack
sp--;
node = nodes[sp];
level = levels[sp];
corner = positions[sp];
//set the size of the current voxel
float size = cube_dim / pow(2,level);
//set the corners of the children
vec3 corners[] =
{corner, corner+vec3(0,0,size),
corner+vec3(0, size,0), corner+vec3(0,size,size),
corner+vec3(size,0,0), corner+vec3(size,0,size),
corner+vec3(size,size,0), corner+vec3(size,size,size)};
float coeffs[8];
for(int child=0; child<8; child++)
{
//Test non zero childs, zero childs are empty and thus should be discarded
coeffs[child] = tree[node].children[child]>0?
//Get the distance to your child if it's not empty or infinity if it's empty
boxIntersection(r, dir, corners[child], size) : 1.f/0.f;
}
int indices[8] = {0,1,2,3,4,5,6,7};
//sort the children from closest to farthest
for(uint i=0; i<8; i++)
{
for(uint j=i; j<8; j++)
{
if((coeffs[j] < coeffs[i]))
{
float swap = coeffs[i];
coeffs[i] = coeffs[j];
coeffs[j] = swap;
int iSwap = indices[i];
indices[i] = indices[j];
indices[j] = iSwap;
vec3 vSwap = corners[i];
corners[i] = corners[j];
corners[j] = vSwap;
}
}
}
//push to stack
for(uint i=7; i>=0; i--)
{
if(!isinf(coeffs[i]))
{
push(tree[node].children[indices[i]],
level+1, corners[i]);
}
}
count++;
}while(level < (max_level-1) && sp>0);
//set color
fragment_color = vec4(count)/100;
}由于可能不完全清楚这是什么,让我解释一下。
我们从一个大立方体开始检查射线盒交叉口。如果我们击中它,我们测试与组成它的8个立方体的交集。
如果我们碰到任何的那些,我们检查交叉与8个立方体组成的立方体。
在2D中,如下所示:
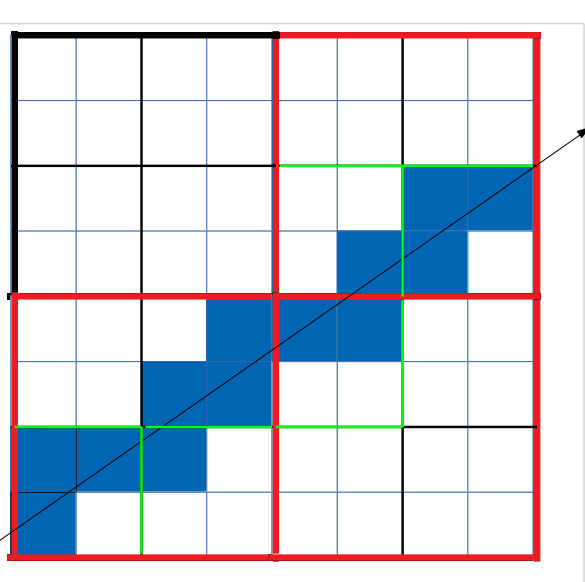
在这个例子中,我们有4层,我们首先检查大框,然后是红色,然后是绿色,最后是蓝色。
打印出作为颜色执行的光线跟踪步骤的次数(这就是我提供的代码片段所做的)
结果如下所示:
如您所见,大多数情况下,着色器的迭代次数不会超过100次。
然而,在gtx 1070中,这个着色器平均需要20万微秒来执行。
因为问题不是执行次数,所以我的问题可能是线程执行。
有人知道我如何优化这段代码吗?最大的瓶颈似乎是堆栈的使用。
如果我在不推到堆栈的情况下运行相同的代码(生成错误的输出),运行时就会有10倍的改进。
回答 3
Stack Overflow用户
发布于 2018-06-18 23:14:29
GPU上的线程执行可能是大规模并行的,但这并不意味着所有线程都彼此独立运行。线程组执行完全相同的指令,唯一的区别是输入数据。这意味着分支和循环不能使线程在执行中发散,因此也不能让它们提前终止。
您的示例显示了这方面最极端的边缘情况:当存在高度相似时,在一组线程中,完成的所有工作只与一个线程相关。
为了缓解这种情况,您应该尽量减少组中线程(或总计)的执行长度差异(在您的情况下是迭代)。这可以通过设置每个着色器传递的迭代次数的限制来实现,并且只对那些需要更多迭代的线程/像素进行重新安排。
Stack Overflow用户
发布于 2018-06-12 18:09:02
似乎你测试的是与射线的交集,最主要的是在八叉树的每个层次上的所有体素。并对它们进行排序(按一定距离),并在每个级别进行排序。我提议另一种方法。
如果射线与包围框(八叉树的0级)相交,则使其位于盒的两个面。或者在一个角落或边缘,这些都是“角落”的情况。
找到三维射线平面相交可以像这里一样。可以通过测试该点是否位于面部的两个三角形之一(如这里 )中的一个,来确定该交叉口是否在脸部内部(四角)。
从摄像机中得到最远的交叉口I0。也让r是光线的单位矢量,在I0朝向照相机的方向上。
查找I0坐标中最深的体素。这是离摄像机最远的体素。
现在我们想要出口坐标I0e的射线在那个体素,通过另一个脸。虽然你可以再次计算所有6个面,如果你的体素是X,Y,X对齐,你定义射线在同一坐标系中,作为八叉树,那么计算器简化了很多。
通过射线的I0e单位向量I1 = I0e + r/1000,将微小的位移(例如最小体素大小的1/1000 )应用于r。找到这些I1的体素。这是体素射线交叉排序列表中的下一个体素。
重复查找I1e,然后I2,然后I2e,I3等,直到边框退出。交叉体素的列表被排序。
使用八叉树可以根据存储其信息的方式进行优化:所有可能的节点或只是使用。具有数据的节点,或仅具有数据的另一个容器的“指针”。这是另一个问题。
Stack Overflow用户
发布于 2018-06-13 19:01:35
第一件突出的事情是你的盒子相交函数。查看一下inigo quilez程序盒函数,了解更快的版本。因为您的盒子大小在所有轴上都是一致的,并且您不需要outNormal,所以您可以得到一个更轻的版本。本质上,用数学代替检验每一个盒子平面的蛮力方法。
此外,在可能的情况下尽量避免临时存储。例如,可以根据每个八叉树框的需要计算角数组。当然,有了以上的建议,这些都将改为箱体中心。
由于nodes、levels和positions总是一起访问的,所以尝试将它们放在一个新的结构中,并作为一个单元访问它们。
等会儿再看..。
https://stackoverflow.com/questions/50778260
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号