
pykalman:(默认)处理缺失的值
我正在使用来自pykalman模块的KalmanFilter,并且想知道它是如何处理丢失的观测的。根据文件:
在现实世界中,传感器偶尔失效是很常见的。Kalman滤波器、Kalman平滑器和EM算法都具备处理这种情况的能力。要使用它,只需在缺少的时间步骤中将NumPy掩码应用于度量: 从numpy导入ma X= ma.array(1,2,3) X1 = ma.masked #隐藏时间步骤1 kf.em(X).smooth(X)
我们可以平滑输入时间序列。由于这是一个“附加”函数,我假设它不是自动完成的;那么,当变量中有NaNs时,默认的方法是什么?
这里解释了一种可能发生的理论方法;这也是pykalman所做的事情(在我看来,这将是非常棒的):
回答 1
Stack Overflow用户
发布于 2018-04-05 22:35:11
让我们看一下源代码:
在filter_update函数中,pykalman检查当前的观察是否被屏蔽。
def filter_update(...)
# Make a masked observation if necessary
if observation is None:
n_dim_obs = observation_covariance.shape[0]
observation = np.ma.array(np.zeros(n_dim_obs))
observation.mask = True
else:
observation = np.ma.asarray(observation) 它不影响预测步骤。但调整步骤有两种选择。它发生在_filter_correct函数中。
def _filter_correct(...)
if not np.any(np.ma.getmask(observation)):
# the normal Kalman Filter math
else:
n_dim_state = predicted_state_covariance.shape[0]
n_dim_obs = observation_matrix.shape[0]
kalman_gain = np.zeros((n_dim_state, n_dim_obs))
# !!!! the corrected state takes the result of the prediction !!!!
corrected_state_mean = predicted_state_mean
corrected_state_covariance = predicted_state_covariance正如你所看到的,这正是理论上的方法。
这里有一个简短的示例和工作数据可供使用。
假设你有一个gps接收器,你想在走路的时候跟踪自己。该接收器具有很好的精度。为了简化,假设你只向前走。
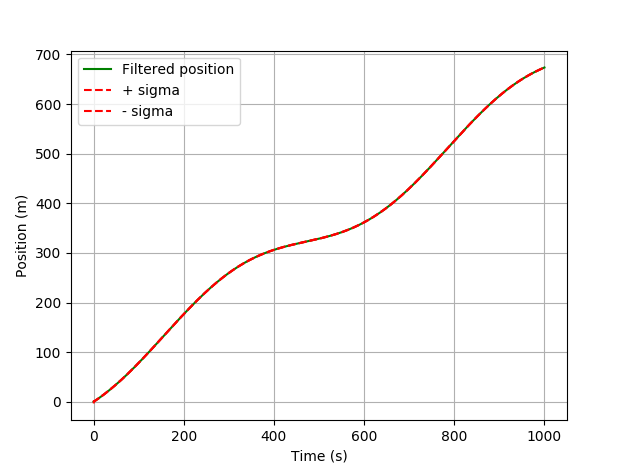
没什么有趣的事。滤波器很好地估计你的位置,因为有一个好的gps信号。如果你有一段时间没有信号怎么办?
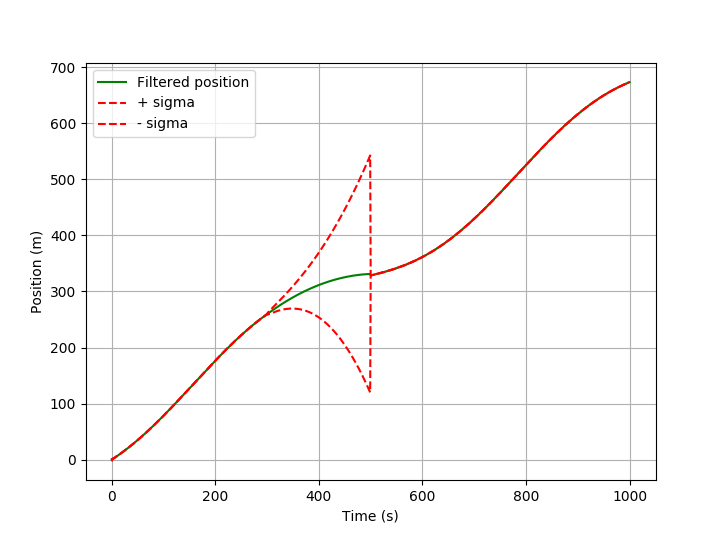
该滤波器只能根据现有状态和系统动力学知识进行预测(,参见矩阵Q,)。随着预测的每一步,不确定性都在增加。估计位置周围的1西格玛范围越来越大.一旦新的观察再次出现,状态就会得到纠正。
下面是代码和数据
from pykalman import KalmanFilter
import numpy as np
import matplotlib.pyplot as plt
from numpy import ma
# enable or disable missing observations
use_mask = 1
# reading data (quick and dirty)
Time=[]
X=[]
for line in open('data/dataset_01.csv'):
f1, f2 = line.split(';')
Time.append(float(f1))
X.append(float(f2))
if (use_mask):
X = ma.asarray(X)
X[300:500] = ma.masked
# Filter Configuration
# time step
dt = Time[2] - Time[1]
# transition_matrix
F = [[1, dt, 0.5*dt*dt],
[0, 1, dt],
[0, 0, 1]]
# observation_matrix
H = [1, 0, 0]
# transition_covariance
Q = [[ 1, 0, 0],
[ 0, 1e-4, 0],
[ 0, 0, 1e-6]]
# observation_covariance
R = [0.04] # max error = 0.6m
# initial_state_mean
X0 = [0,
0,
0]
# initial_state_covariance
P0 = [[ 10, 0, 0],
[ 0, 1, 0],
[ 0, 0, 1]]
n_timesteps = len(Time)
n_dim_state = 3
filtered_state_means = np.zeros((n_timesteps, n_dim_state))
filtered_state_covariances = np.zeros((n_timesteps, n_dim_state, n_dim_state))
# Kalman-Filter initialization
kf = KalmanFilter(transition_matrices = F,
observation_matrices = H,
transition_covariance = Q,
observation_covariance = R,
initial_state_mean = X0,
initial_state_covariance = P0)
# iterative estimation for each new measurement
for t in range(n_timesteps):
if t == 0:
filtered_state_means[t] = X0
filtered_state_covariances[t] = P0
else:
filtered_state_means[t], filtered_state_covariances[t] = (
kf.filter_update(
filtered_state_means[t-1],
filtered_state_covariances[t-1],
observation = X[t])
)
position_sigma = np.sqrt(filtered_state_covariances[:, 0, 0]);
# plot of the resulted trajectory
plt.plot(Time, filtered_state_means[:, 0], "g-", label="Filtered position", markersize=1)
plt.plot(Time, filtered_state_means[:, 0] + position_sigma, "r--", label="+ sigma", markersize=1)
plt.plot(Time, filtered_state_means[:, 0] - position_sigma, "r--", label="- sigma", markersize=1)
plt.grid()
plt.legend(loc="upper left")
plt.xlabel("Time (s)")
plt.ylabel("Position (m)")
plt.show() 更新
如果你掩盖一个更长的时间(300:700),那就更有趣了。
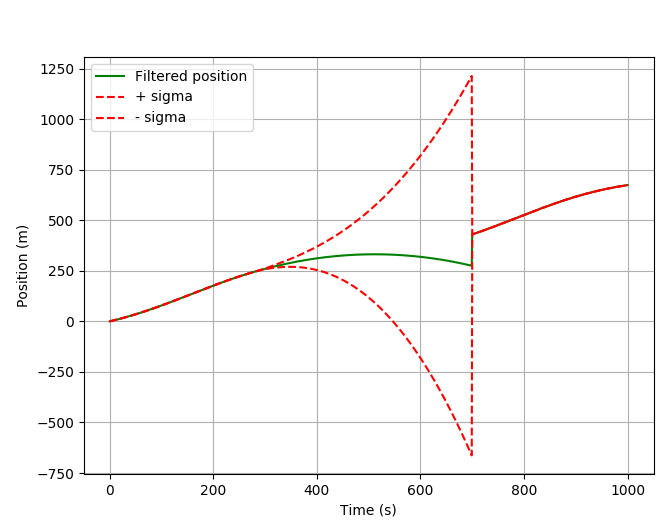
正如你所看到的那样,这个位置又回到了过去。这是由于过渡矩阵F的存在,它将位置、速度和加速度的预测结合起来。
如果你看一下速度状态,它解释了下降的位置。
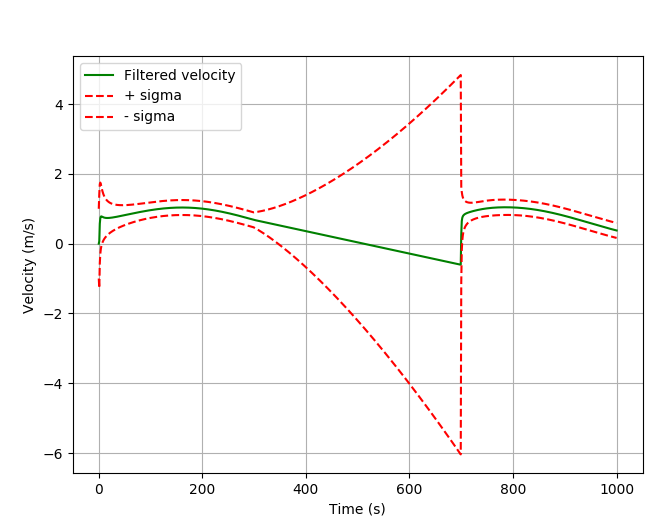
在300秒的时间点,加速度冻结.速度以一个恒定的斜率下降,并越过0值。在这个时间点之后,这个位置必须返回。
要绘制速度图,请使用以下代码:
velocity_sigma = np.sqrt(filtered_state_covariances[:, 1, 1]);
# plot of the estimated velocity
plt.plot(Time, filtered_state_means[:, 1], "g-", label="Filtered velocity", markersize=1)
plt.plot(Time, filtered_state_means[:, 1] + velocity_sigma, "r--", label="+ sigma", markersize=1)
plt.plot(Time, filtered_state_means[:, 1] - velocity_sigma, "r--", label="- sigma", markersize=1)
plt.grid()
plt.legend(loc="upper left")
plt.xlabel("Time (s)")
plt.ylabel("Velocity (m/s)")
plt.show() https://stackoverflow.com/questions/49662567
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号