
如何使用Orbbec天文深度传感器与OpenCV?
我目前正在使用奥尔贝克·阿斯特拉·米尼深度传感器。我下载并安装了阿斯特拉驱动程序和OpenNI2包。深度传感器在我的Windows 10上的设备管理器中显示,只要我将它附加到USB端口上。到目前为止一切都很好。
我的目标是用RGB images和depth map阅读OpenCV,并用imshow显示它们。
下面的代码在Visual 2015中编译得很好,但是我得到了这个错误:
OpenCV Error: Assertion failed (size.width>0 && size.height>0) in cv::imshow, file C:\build\master_winpack-build-win64-vc14\opencv\modules\highgui\src\window.cpp..。因此,我猜OpenCV无法打开设备,因此我的cv::Mat一直是空的。
我在某个地方读到我需要用OpenCV标志编译OpenNI --这是真的吗?如果是的话,有什么有用的链接可以帮助我取得一些进展吗?知道我可能错过了什么吗?
#include<iostream>
#include<algorithm>
#include<fstream>
#include<System.h>
#include<time.h>
#include<opencv2/core/core.hpp>
using namespace std;
int main(int argc, char **argv) {
cv::VideoCapture cap;
cap.open(CV_CAP_OPENNI);
cap.set(CV_CAP_OPENNI_IMAGE_GENERATOR_OUTPUT_MODE, CV_CAP_OPENNI_VGA_30HZ);
cap.set(CV_CAP_OPENNI_DEPTH_GENERATOR_REGISTRATION, 1);
cv::Mat im, dm; // rgb image, depth map
while (true)
{
if (cap.grab()) {
cap.retrieve(im, CV_CAP_OPENNI_BGR_IMAGE);
cap.retrieve(dm, CV_CAP_OPENNI_DEPTH_MAP);
} else {
cout << "ERROR: Could not grab image data." << endl;
}
if (!im.data) {
cout << "ERROR: RGB not retrieved." << endl;
}
if (!dm.data) {
cout << "ERROR: Depth map not retrieved." << endl;
}
cv::imshow("Image", im);
cv::imshow("Depth", dm);
if (cv::waitKey(1) >= 0)
break;
}
cap.release();
return 0;
}更新19.02.18:
通过编译带有OpenCV标志的OpenNI库(如描述的这里 )来解决问题。谢谢德米特里!
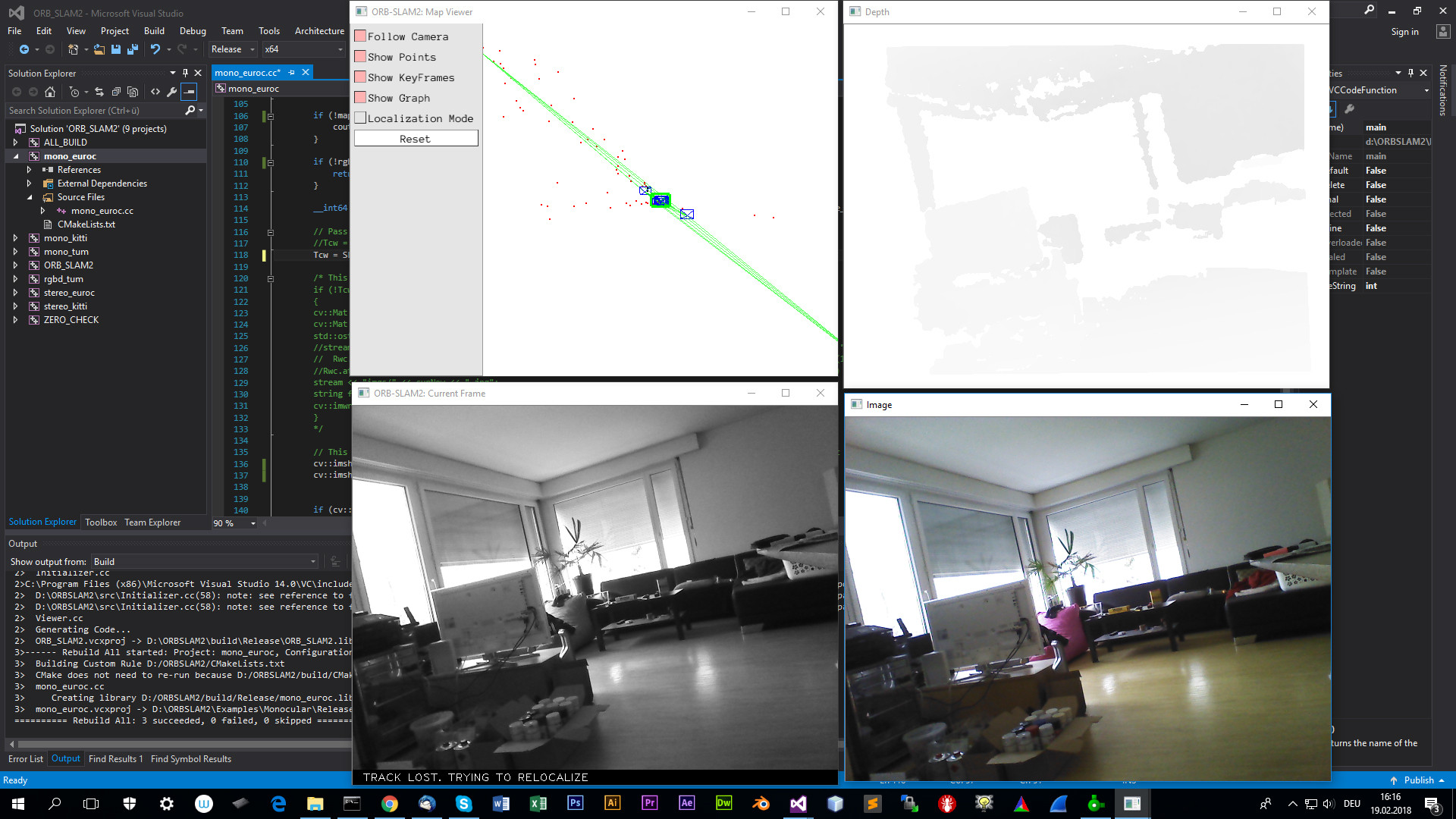
然而,深度图像仍然相当微弱。有什么办法调整参数吗?尽管,在运行Orbbec的示例应用程序时,深度映像是非常坚实的(它正在使用OpenGL)。所以我想问题就在OpenCV的某个地方?
下面是深度图的截图(倒置为白色,很弱的共振):
回答 2
Stack Overflow用户
发布于 2018-02-20 15:04:23
我编写了一个综合指南,如何用包括OpenNI2在内的OpenCV编译球体扣球2 (这是我的初步目标),以便使用Orbbec天文相机作为深度传感器。希望其他在这条线上绊倒的人可以使用它。
Stack Overflow用户
发布于 2018-05-23 18:04:06
你问:
然而,深度图像仍然相当微弱。有什么办法调整参数吗?尽管,在运行Orbbec的示例应用程序时,深度映像是非常坚实的(它正在使用OpenGL)。所以我想问题就在OpenCV的某个地方?
尝试实现对深度图像的虚假颜色映射。不同的深度像素的值变化很大,因此,如果直接看到,就很难分辨。
// Holds the colormap version of the image:
Mat img_color;
// Apply the colormap:
applyColorMap(img_in, img_color, COLORMAP_JET);
// Show the result:
imshow("colorMap", img_color);https://stackoverflow.com/questions/48835876
复制相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号