
从2幅图像的同调图中寻找平面法线?
从2幅图像的同调图中寻找平面法线?
提问于 2017-12-07 18:46:48
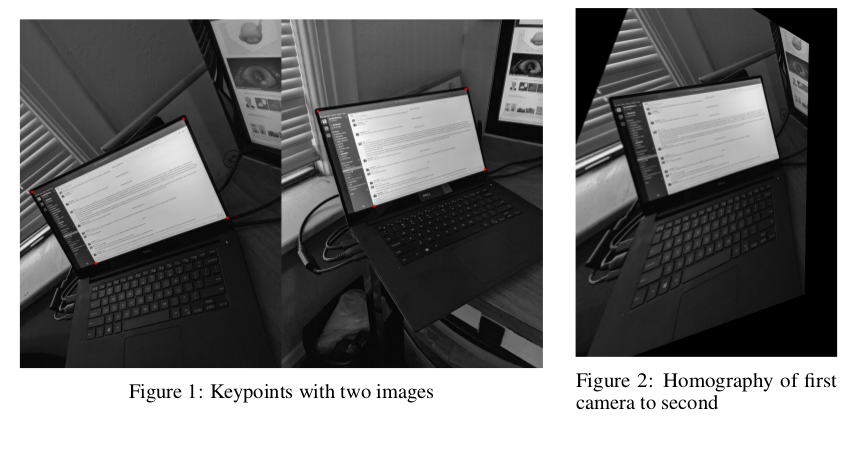
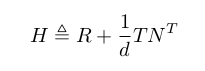
我有2张照片,从不同的角度和位置的飞机。我找到了四个匹配点,并计算出了同形矩阵,H。这张图片是用它来表示变换的,所以它很难工作。
我现在想找到这架飞机的正常情况。在这本书中,一张3D视觉邀请函说你可以把它分解成
其中N是平面的法线。我已经这样做了,结果我得到了一个解决方案
N= -0.00514723,0.00503588,0.99997407
对于其他的例子来说,这个正常的几乎指向Z方向的海峡.是什么导致的??
我还检查了倒转上面的方程给了我H,它确实给了我,所以有有效的解,但是飞机显然离海峡很远。
回答 1
Stack Overflow用户
回答已采纳
发布于 2018-01-07 21:28:34
这个公式是正确的。我怀疑你试图应用它,而没有使用相机的内在校准(这是必需的)。你有相机内部校准吗?如果是这样的话,您应该首先将对应转换为“标准化像素坐标”(在OpenCV中使用非失真点进行转换),然后计算这些归一化点之间的同形,然后使用公式进行分解。
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/47701787
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号