
如何利用SimScape多体接触力库模拟固定平面?
如何利用SimScape多体接触力库模拟固定平面?
提问于 2017-11-26 07:13:46
我试图在MATLAB中模拟固定平面和球体之间的接触力,使用多体接触力库https://www.mathworks.com/matlabcentral/fileexchange/47417-simscape-multibody-contact-forces-library,如在9:58的MATLAB https://www.youtube.com/watch?v=VZIG0HlBHC4中所示。然而,当我重新创建模型并自己运行仿真时,我会得到以下错误。
External Force and Torque External_Force_and_Torque_PlaB has its follower port rigidly connected to the world frame; it has no effect. You can configure this diagnostic in the Simscape Multibody Configuration Parameters dialog.我试着在World框架和平面实体之间添加另一个约束/连接来解决这个问题,但是我仍然得到了同样的错误?如何纠正此错误?
回答 1
Stack Overflow用户
回答已采纳
发布于 2018-07-26 11:56:31
我也遇到了同样的问题。看看这里:https://ch.mathworks.com/matlabcentral/answers/378561-rigidly-connected-port-error-with-simscape-multibody-contact-forces-library
此错误是由于默认设置与新的Simulink模型,这是不兼容的联系力量库。
要解决这一问题:
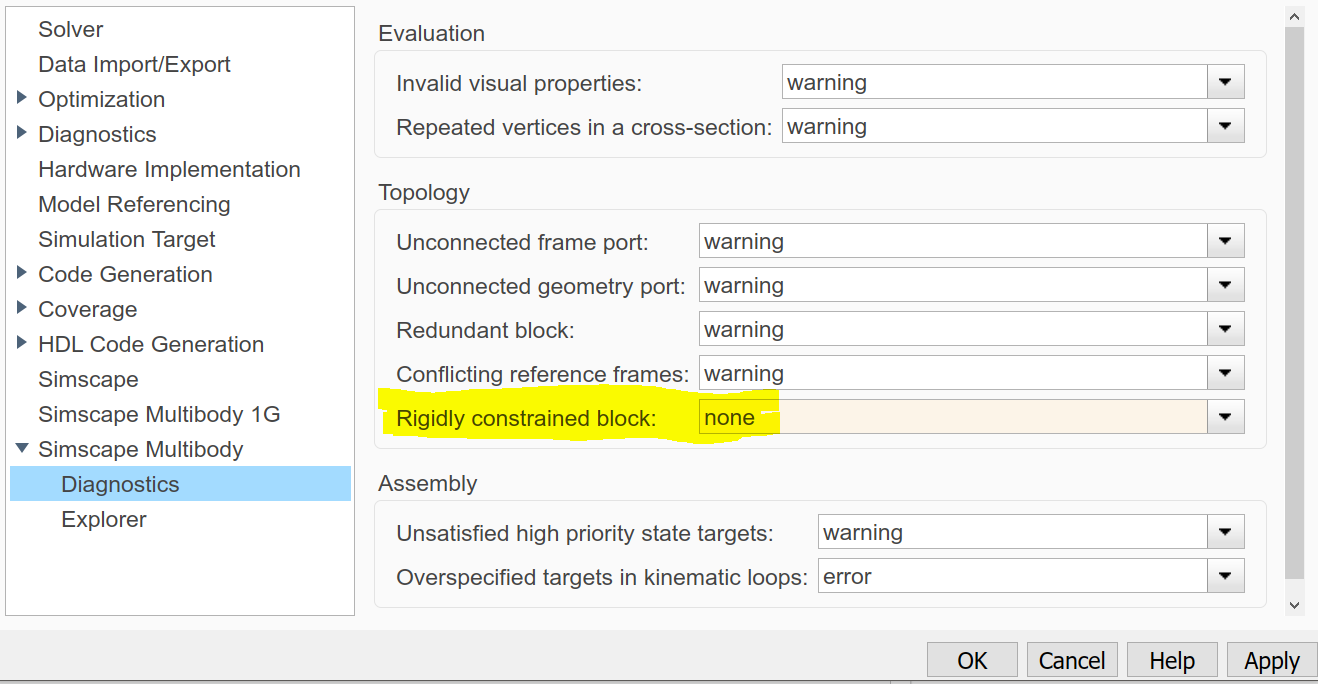
- 转到仿真>模型配置参数
- 在Simscape多体>诊断窗格中,将“严格约束块”诊断更改为“警告”或“无”
页面原文内容由Stack Overflow提供。腾讯云小微IT领域专用引擎提供翻译支持
原文链接:
https://stackoverflow.com/questions/47493862
复制相关文章
相似问题
腾讯云开发者

Copyright © 2013 - 2026 Tencent Cloud. All Rights Reserved. 腾讯云 版权所有
深圳市腾讯计算机系统有限公司 ICP备案/许可证号:粤B2-20090059 ![]() 粤公网安备44030502008569号
粤公网安备44030502008569号
腾讯云计算(北京)有限责任公司 京ICP证150476号 | 京ICP备11018762号